CN100338460C - 一种检测元件的方法 - Google Patents
一种检测元件的方法 Download PDFInfo
- Publication number
- CN100338460C CN100338460C CNB031594212A CN03159421A CN100338460C CN 100338460 C CN100338460 C CN 100338460C CN B031594212 A CNB031594212 A CN B031594212A CN 03159421 A CN03159421 A CN 03159421A CN 100338460 C CN100338460 C CN 100338460C
- Authority
- CN
- China
- Prior art keywords
- echo signal
- array
- transducer
- produce
- sept
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/44—Processing the detected response signal, e.g. electronic circuits specially adapted therefor
- G01N29/4409—Processing the detected response signal, e.g. electronic circuits specially adapted therefor by comparison
- G01N29/4436—Processing the detected response signal, e.g. electronic circuits specially adapted therefor by comparison with a reference signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/04—Analysing solids
- G01N29/06—Visualisation of the interior, e.g. acoustic microscopy
- G01N29/0654—Imaging
- G01N29/069—Defect imaging, localisation and sizing using, e.g. time of flight diffraction [TOFD], synthetic aperture focusing technique [SAFT], Amplituden-Laufzeit-Ortskurven [ALOK] technique
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/26—Arrangements for orientation or scanning by relative movement of the head and the sensor
- G01N29/262—Arrangements for orientation or scanning by relative movement of the head and the sensor by electronic orientation or focusing, e.g. with phased arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/32—Arrangements for suppressing undesired influences, e.g. temperature or pressure variations, compensating for signal noise
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/34—Generating the ultrasonic, sonic or infrasonic waves, e.g. electronic circuits specially adapted therefor
- G01N29/341—Generating the ultrasonic, sonic or infrasonic waves, e.g. electronic circuits specially adapted therefor with time characteristics
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/36—Detecting the response signal, e.g. electronic circuits specially adapted therefor
- G01N29/38—Detecting the response signal, e.g. electronic circuits specially adapted therefor by time filtering, e.g. using time gates
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/18—Methods or devices for transmitting, conducting or directing sound
- G10K11/26—Sound-focusing or directing, e.g. scanning
- G10K11/34—Sound-focusing or directing, e.g. scanning using electrical steering of transducer arrays, e.g. beam steering
- G10K11/341—Circuits therefor
- G10K11/346—Circuits therefor using phase variation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/01—Indexing codes associated with the measuring variable
- G01N2291/011—Velocity or travel time
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/028—Material parameters
- G01N2291/02836—Flow rate, liquid level
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/04—Wave modes and trajectories
- G01N2291/044—Internal reflections (echoes), e.g. on walls or defects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/04—Wave modes and trajectories
- G01N2291/048—Transmission, i.e. analysed material between transmitter and receiver
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/10—Number of transducers
- G01N2291/106—Number of transducers one or more transducer arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8913—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using separate transducers for transmission and reception
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
- G01S15/8918—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array the array being linear
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
- G01S15/8925—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array the array being a two-dimensional transducer configuration, i.e. matrix or orthogonal linear arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8934—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration
- G01S15/8938—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration using transducers mounted for mechanical movement in two dimensions
- G01S15/894—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration using transducers mounted for mechanical movement in two dimensions by rotation about a single axis
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8979—Combined Doppler and pulse-echo imaging systems
Landscapes
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Biochemistry (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Analytical Chemistry (AREA)
- Pathology (AREA)
- Immunology (AREA)
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
用于检测元件(10)的一种方法包括激励形成阵列(14)的多个换能器(12),产生聚焦到元件的超声发射束(超声束)。阵列和元件由间隔物(18)分开。利用换能器产生多个回声信号,并在多个频道(20)中处理回声信号。处理包括动态聚焦和提供动态接收孔径(24),二者均可补偿超声束在元件/间隔物界面的折射。一种单次检测方法包括:(a)定位面对元件的阵列;(b)激励换能器;(c)产生多个回声信号;(d)围绕轴(26)改变阵列和元件的相对角度定向,并重复步骤(b)和(c);以及(e)处理回声信号,以形成至少一个处理的回声信号。
Description
技术领域
本发明一般涉及工业应用的超声成像方法,具体地说,是利用先进的相控阵超声系统检测在工业环境中发现的元件和结构(统称为元件)缺陷的改进的超声成像方法。
背景技术
工业应用中使用较轻的元件以及使用较长的工程设计寿命的工业元件都增加了对用于工业环境的增强的无损伤检测技术的需求。为满足当前的需求,就需要以更高的生产率检测更小的缺陷。医学成像工具,例如GE LOGIQ 9以及GE LOGIQ Book等,包括许多工业应用所需要的特性。
工业应用的常规超声检测系统或采用具有固定聚焦透镜的探头或采用有限能力的相控阵成像技术。其限制包括:如果是固定聚焦透镜系统就只能在场的聚焦深度内进行检测,或在相控阵系统的界限内产生聚焦束。一般,工业应用的常规超声系统或使用脉冲回声模式的单探头,或使用透射或投掷和捕捉(pitch and catch)模式的一对探头。这些探头或不聚焦,或用附加的透镜聚焦。要求在大深度范围内的高灵敏度工业检测通常伴随着使用适当的聚焦探头作多次扫描。这种检测由于需要多次扫描所以很费时。高灵敏度大深度范围的检测也用多区域法进行,此时使用多频道获取系统来同时监控来自多探头的数据,每个探头监控测试元件内一个单独的深度。工业应用的常规超声检测系统通常限于测试元件的单角度声束询问。成角度超声束的产生方法是:或者将探头附加在锲形材料上,相对测试元件形成一个角度;或是将探头浸入具有一种材料速度的材料中,此速度与测试元件速度的不同足以引起声束的折射。
用于工业检测的常规相控阵成像超声系统通常限于声束的形成,更先进的这类系统可提供动态深度聚焦,但不能进行动态孔径定径。动态孔径定径对操纵声束性能是需要的。
因此需要提供一种工业应用的检测方法,它既可提供动态聚焦,又可提供动态孔径定径。该方法还需要能补偿在测试元件和间隔物(例如水间隔物)之间界面上的折射。也需要提供一种工业应用的检测方法,它能因测试元件/间隔物界面的折射而对操纵超声发射束进行补偿。此外,还需要校正因弯曲的测试元件/间隔物之间界面而引起的表面几何效应。为了增加生产率,也需要提供一种单次检测方法,这样不需要费时的移动探头就可检测工业元件。也需要一种可利用超声检测技术来检测通过管道的产品流质量的方法。为了减少检测时间,需要采用全阵列声透射。而且,对于工业应用,需要引入具有相应探头位置的图像与通常医学应用中使用的先进超声成像系统的同步。
发明内容
简要地说,按照本发明的一个实施例,提供了检测元件的一种方法。该检测方法包括激励形成阵列的多个换能器,以产生沿所选射线路径从阵列聚焦到元件上的超声发射束。阵列被具有材料速度vw的间隔物与元件分开。该检测方法还包括利用换能器作为接收元件来产生多个回声信号,并在多个频道处理回声信号。处理包括将回声信号沿所选的射线路径动态地聚焦到元件中至少一个焦点P上。动态聚焦包括调节延迟波形以补偿在测试元件和间隔物之间界面上超声发射束的折射并将延迟波形加到各频道的回声信号上以产生多个延迟的回声信号。处理还包括将活性接收元件数作为波幅RS的函数来调节,以提供接收时的动态孔径。调节接收元件数包括补偿在元件和间隔物之间界面上超声发射束的折射。处理还包括从活性接收元件合计延迟的回声信号以产生一个聚焦的回声信号。
检测元件的另一个方法实施例包括对阵列中的每个换能器加单独的激励脉冲,产生沿所选的射线路径聚焦到元件的超声发射束。如上述,阵列被具有材料速度vw的间隔物与元件分开。检测方法还包括沿所选的射线路径以相对表面法线的角度θ操纵超声发射束。操纵包括调节发射延迟波形,以补偿在测试元件和间隔物之间界面上超声发射束的折射并用发射延迟波形调制激励脉冲。检测方法还包括利用换能器作为接收元件产生多个回声信号并利用延迟波形处理多个频道中的回声信号,延迟波形包括多个接收延迟,每个接收延迟包括一个静态接收操纵项。回声信号处理包括调节每个静态接收操纵项以补偿在元件和间隔物界面上的超声发射束的折射,将延迟波形加到各频道中的回声信号上以产生多个延迟的回声信号,并合计来自接收元件的延迟回声信号以产生一个操纵的回声信号。
还提供了用于检测具有检测表面的元件的单次方法的实施例。单次检测方法包括:(a)定位换能器阵列,使之面对元件的检测表面,(2)激励换能器,产生沿所选射线路径从阵列聚焦到元件上的超声发射束,(c)利用换能器作为接收元件产生多个回声信号,(d)围绕一个轴改变阵列和元件的相对角度方向并重复步骤(b)和(c),以及(e)处理多个频道中的回声信号,以形成至少一个处理的回声信号。
还提供了检测通过管道的产品流的方法实施例。该检测方法包括激励形成阵列的多个换能器以传送超声能量到管道内,由反射的超声能量产生多个接收信号,并处理在多个频道中的接收信号。处理包括将接收信号与频率基准进行比较以确定对反射的超声能量所造成的多个频率偏移。
附图说明
参考附图阅读了以下详细说明后就能更好的理解本发明的这些以及其它特性,方面和优点,在所有附图中同样的符号代表同样的部件,附图包括:
图1是超声成像系统的方框图;
图2示出由间隔物分开的阵列和元件,元件和间隔物具有不同的材料速度,分别为Vs和Vw;
图3示出由换能器阵列和弯曲表面元件之间的间隔物引起的二次透镜效应;
图4示出单次检测方法;
图5示出元件的“缝合”图像,对材料速度与元件材料速度不同的间隔物有补偿或没有补偿;
图6示出透射检测方法;
图7示出常规的“投掷和捕捉”检测技术;
图8示出对投掷和捕捉都使用换能器阵列的改进的“投掷和捕捉”检测技术;
图9示出检测通过管道检测产品流的方法;
图10示出对阵列中第一组换能器的每一个(换能器)同时激励;
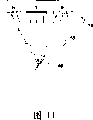
图11示出对投掷和捕捉使用单一换能器阵列的另一改进的“投掷和捕捉”检测技术。
具体实施方式
A.动态孔径和动态聚焦
参阅图1和2说明检测元件10的一种方法。该方法包括激励组成阵列14的多个换能器12,以产生沿所选射线路径16从阵列聚焦到元件10上的超声发射束,如图1所示,图1以方框图形式示出超声成像系统100。每个换能器12都由,例如,发射器28所产生的脉冲激励。如图2所示,阵列14由材料速度为Cw的间隔物18与元件10分开。典型间隔物18包括水,其它液体,例如油和甘油,以及加工的楔(靴)。靴标出的实例包括一些固体结构,加工成一侧与换能器表面的几何形状相配合,另一侧与元件的几何形状相配合。靴常用有机玻璃或透明合成树脂形成。该方法还包括利用换能器12作为接收元件12产生多个回声信号,并在多个频道20处理回声信号。例如,将反射回阵列14的超声能量由各换能器12转换成电信号(回声信号)并通过一组开关32单独加到接收器30上。对于图1所示的示范系统,发射器28,接收器30以及开关32都由数字控制器19根据操作员输入的命令来控制。
处理包括将回声信号沿所选的射线路径16动态聚焦到元件10中至少一个焦点P上。动态聚焦包括调节有多个接收延迟的延迟波形(profile)以补偿在测试元件10和间隔物18间界面22上超声发射束的折射。典型的接收延迟包括时间和/或相位延迟,在图1中以(Tk)表示。如果是线性阵列14,每个接收延迟包括一个在接收回声时变化的声束聚焦时间延迟,以提供在发出回声的波幅内所接收的超声能量的动态聚焦。正如在授于O’Donnell的美国专利号5,235,982,题目为“Dynamic transmit focusing of a steeredultrasonic beam”中所述,(该专利已作为参考文献包括在本文内),延迟一般可用下式表示:
Tk=(k-(N-1)/2)2d2cos2θ/2Rv
式中R为来自阵列14中心的焦点P的波幅,v是元件10的材料速度,θ是声束16相对表面法线21的入射角。但,该表达式并不补偿在元件/间隔物界面22的折射。为补偿在界面22上的折射,此表达式的典型调整为:
Tk=[k-(N-1)/2]2d2cos2θ/[2(Rwvw+Rsvs)]
式中Rw是声束在间隔物18中沿中心声束轴16延伸的长度,vw是在间隔物18中的材料速度,Rs是声束在元件10中沿中心声束轴16延伸的长度,vs是在元件10中的材料速度。延迟波形加到各频道20的回声信号上,产生多个延迟的回声信号。例如,接收器30以一系列波幅Rs(Rw对于既定角θ为常数)取样回声信号,并提供适当的接收延迟以便沿取样声束动态聚焦到点P。这样,每次发射一个超声脉冲都能获得一系列回声信号样本,它们代表着由位于沿超声接收声束的相应系列点P所反射的声波数量。
为了提供接收时的动态孔径24,处理还包括调节作为波幅Rs函数的(Rw对于既定入射角θ为常数)活性接收元件的数量。此处所用的词语“活性接收元件”12是指其回声接收信号包括在总体聚焦回声信号内的换能器。示范的活性接收元件在图2中以阴影表示。相反,非活性接收元件12的回声信号在计算聚焦回声信号时忽略不计。
调节接收元件12的数量包括对超声发射束在元件10和间隔物18之间界面22的折射加以补偿。例如,对于入射到在元件而元件表面处材料速度没有显著变化的元件的超声束16,为了维持恒定的焦数F,孔径宽度A根据公式F=R/A来调节。所以在此常规实例中,随着波幅R的增加,A也必须增加以维持恒定的焦数F。换句话说,有更多的活性接收元件12的延迟回声信号对聚焦回声信号起作用。如上述,超声发射束16在元件10和间隔物18之间的界面22处由于材料速度vw和vs不匹配而发生折射。为补偿该折射,根据表达式F=[Rw+Rs(vs/vw)]/A,对孔径宽度A进行调节。
除了上述动态聚焦和动态孔径定径之外,处理还包括将来自全部活性接收元件的延迟回声信号加以合计,产生一个聚焦的回声信号。例如,延迟回声信号在接收器30中加以合计,形成聚焦的回声信号,该聚焦的回声信号可以用来,例如,产生显示器17上图像中的一个像素或一个线条。
虽然对提供动态孔径定径和动态聚焦是以材料速度不匹配的由间隔物18分开的元件10和阵列14进行说明的,但该组合也适用于对元件10的接触超声检测,例如作为工业检测应用。“接触”的意思是指阵列14被放置成直接和元件10相接触。(图1和2中未示出。)但,如果没有隔离物18,元件10的表面22处就没有材料速度的不匹配,因而元件10的表面22处也就没有折射。于是,对于没有间隔物18的元件10的超声检测,不作动态定孔径和聚焦校正以补偿在元件表面22处的折射。没有间隔物18的动态孔径定径和聚焦在例如授于Charles E.Thomas的美国专利号4,180,790,题目为”Dynamic Array Aperture and Focus Control for UltrasonicImaging Systems”中有说明,该专利已作为参考包括在本文内。
有利的是,动态孔径结合动态聚焦的使用能在整个检测深度内控制所需的聚焦特性。
最好阵列14含有大量的换能器12,例如128个或1024个,以提供大的检测面积。要使用大量的换能器而不相应增加频道20的数量并减少所需的开关32的数量,换能器12可以复用,例如在授于Thomas等的美国专利号5,329,930,题目为”Phased Array SectorScanner with Multiplexed Acoustic Transducer Elements”中所述,该专利已作为参考包括在本文内。有利的是,相对常规的工业超声检测方法而言,独立使用128个换能器12或通过复用使用1028个换能器12便于提高生产率和检测的灵活性。
最好引导或操纵超声束将声束通过一组角度θ移动来扫描元件10。按照一个更特别的实施例,单独的激励信号脉冲加到各个换能器上,用分别的电压驱动各换能器12(变迹法)。该实施例示于图2,此时检测方法还包括沿所选的射线路径16以相对表面法线21的角度θ来操纵超声发射束。操纵包括调节发射延迟波形以补偿超声发射束在界面22的折射。发射延迟波形包括一组发射延迟,而且每个发射延迟包括一个静态操纵项。示范的发射延迟包括时间和/或相位延迟,在图1中也用(Tk)表示。操纵还包括用发射延迟波形调制激励信号脉冲。例如,发射器28对加到序列换能器元件12上的每个信号脉冲都加一个发射延迟。如果发射延迟为零(Tk=0),则所有换能器元件12同时受激,所得的超声束被导向垂直于间隔物18和元件10之间的界面22。为操纵超声束,从阵列14的一端(k=1)到另一端(k=N)加到第k个信号脉冲的发射延迟Tk可以表示为:
Tk(θ)=(d/vw)sinθ(k-1)
式中d为换能器元件12之间的距离,如图1所示。该发射延迟波形(Tk)补偿了在界面22上受控超声束的折射。除了操纵超声束的发射,该检测方法还包括形成受控的聚焦回声信号,方法是将延迟波形加到各频道的回声信号上来形成延迟的回声信号(操纵接收)。在此操纵实施例中,延迟波形包括一组接收延迟,每个接收延迟包括一个静态接收操纵项。对每个静态接收操纵项加以调节以补偿在界面的折射。每个静态接收操纵项在接收时是和上述发射延迟同样的延迟Tk(θ)。虽然只示出了一个角度θ,本专业的技术人员能了解也可沿相对共用轴21的多个角度(θ,ψ)来操纵超声束。本实施例包括单角度(θ)和多角度(θ,ψ)操纵。
为了在各种深度Rs扫描元件10,使用了多次发射。对于检测方法的该具体实施例,在每个连续激励时间间隔ti将各信号脉冲加到各换能器12上,对每个连续激励时间间隔ti产生回声信号。例如,在第一时间间隔t1,分别驱动每个换能器12,产生第一组回声信号。在第二时间间隔t2,分别驱动每个换能器12,产生第二组回声信号,依此类推。在此实施例中,在每个连续第i个激励时间间隔ti,回声信号沿所选的射线路径16动态聚焦到不同波幅Ri的多个焦点Pi。在焦点Pi的动态聚焦包括调节包含多个接收延迟Tki的各延迟波形(Tki),以补偿超声发射束在元件10和间隔物18之间界面22上的折射。这些调节的进行如上所述。除了对每个时间间隔ti动态聚焦,对于本具体实施例的检测方法,对每个时间间隔ti,进行动态定孔径。具体地说,对每个连续激励时间间隔ti调节作为波幅Ri函数的活性接收元件的数量,以补偿超声发射束在元件10和间隔物18之间界面22上的折射。为了对每个波幅Ri产生一个回声聚焦信号,对每个连续激励时间间隔,将来自所有活性接收元件的延迟回声信号例如在接收器30中加以合计。
为显示所得的图像数据,将来自多个深度的图像数据组合(缝合)成单一帧(图像)是有用的。采用显示系统17显示该单一帧。图像缝合在业界已知,此处不再赘述。但应指出当通过间隔物18形成图像时,常规医学超声成像系统会由于间隔物18(Vw)和元件10(Vs)之间的材料速度差而使图像失真,该失真在图5中示出。如图所示,未经补偿的图像使对应于间隔物18的图像部分失真Vs/Vw。为了补偿界面22上材料速度的不匹配,按照一个具体的实施例,对应于间隔物18的图像部分减少了Vs/Vw。经补偿的图像也示于图5。另一种校正是去除对应于间隔物18的图像部分。例如用加在显示系统17上的成像软件,就可以进行以上任一种校正。
B.操纵
本发明的另一种方法实施例也结合图1和图2加以说明。检测元件10的检测方法包括对形成阵列14的各个换能器12分别加激励脉冲,产生沿所选射线路径16从阵列14聚焦到元件10的超声发射束。如图2所示,阵列14用材料速度为cw的间隔物18与元件10分开。该方法还包括以相对表面法线21的角度θ沿所选射线路径操纵超声发射束。操纵包括调节发射延迟波形(Tk)以补偿超声发射束在界面22的折射,如上所述。操纵还包括用发射延迟波形(Tk)调制激励脉冲,如上所述。检测方法还包括用换能器12作为接收元件12产生多个回声信号,并利用延迟波形处理多个频道20的回声信号。延迟波形包括多个接收延迟,每个接收延迟具有一个静态接收操纵项,如上所述。处理包括调节每个静态接收操纵项以补偿在元件10和间隔物18之间界面22上超声发射束的折射,将延迟波形(Tk)加到各频道20中的回声信号上以产生多个延迟的回声信号,并合计来自接收元件12的延迟回声信号以产生一个操纵的回声信号。如上对第一实施例所述,回声信号由每个换能器12产生并通过一组开关32分别加到接收器30上。每个接收延迟Tk(θ)加到各第k个换能器12上的回声信号以形成各延迟回声信号。延迟回声信号在接收器30中合计。
除了操纵超声束外,提供动态孔径定径对检测工业元件也是有用的。因而,对于更特别的实施例,处理步骤还包括将活性接收元件12数量作为波幅R的函数来调节,以提供接收时的动态孔径24。如上述,活性接收元件12是其回声接收信号包括在总体操纵回声信号内的换能器12。相反,非活性接收元件12的回声信号在计算操纵回声信号时忽略不计。由于界面22上材料速度的不匹配,接收元件12数量的调节包括补偿界面22上超声发射束的折射。例如,根据表达式F=[Rw+Rs(vs/vw)]/A,对孔径宽度A进行调节,如上所述。如前指出,Rw是声束在间隔物18中沿中心声束轴16延伸的长度,Cw是在间隔物18中的材料速度,Rs是声束在元件10中沿中心声束轴16延伸的长度,vs是在元件10中的材料速度。Rw和Rs在图2中有示范表示。对于此操纵加动态孔径的实施例,合计步骤包括将所有活性接收元件12的延迟回声信号加以合计,产生受操纵的回声信号。虽然只示出了一个角度(θ),本专业的技术人员能认识到也可沿相对多个角度(θ,ψ)来操纵超声束。本实施例包括单角度(θ)和多角度(θ,ψ)操纵。
除了操纵纵向波,也需要操纵其它波型来检测工业元件。工业元件10,诸如锻件、坯料、焊点(焊件)、及其它固体,支持剪切波和表面波的传播。简要的说,声波具有三种主要的传播模式:纵向、剪切和表面波。另外的传播模式包括拉姆波(Lamb wave),史通利波(Stonely wave),和延伸波(extensional wave)。剪切波的速度VSH大约为纵向波速度VL的一半(VSH~0.5VL),表面波的速度VSU大约为剪切波速度的0.9倍(VSU~0.9VSH)。如以上对图2的讨论,以角度θ入射到间隔物18/元件10的界面22(例如水/钢界面22)的超声束在元件中以折射角φ折射,入射和折射角之间的关系由斯涅耳(Snell)定律决定:sinθ/sinφ=VW/VS。更特别的是,这三种模式具有一个特殊的折射角φ。即,纵向波以折射角φL折射,由sinθ/sinφL=VW/VL决定;剪切波以折射角φSH折射,由sinθ/sinφSH=VW/VSH决定;表面波以折射角φSU折射,由sinθ/sinφSU=VW/VSU决定。随着入射角θ的增加,折射角φL和φSH也增加,直到达到各自的临界角φL=90°和φSH=90°,在此点纵向波和剪切波不再在元件10中传播。入射角θ相应的临界值由斯涅耳定律决定并对纵向和剪切波型各不相同,这是因为这两种波型具有不同的速度VL和VSH。
如上述,工业元件10支持剪切和表面波的传播。所以,对于本检测方法的另一具体实施例,单独的激励脉冲加到每个换能器12上,产生聚焦到元件10中的剪切波超声发射束。有利的是,在同一频率下剪切波的波长λSH大约等于纵向波波长λL的一半,就可对缺陷有更大的分辨率。此外,如果入射角θ超过第一临界角φL,纵向波就不在元件10中传播,使用剪切波就可在所需角度θ检测元件,而没有错误的纵向波信号干扰超声检测。同理,对于本检测方法的另一具体实施例,单独的激励脉冲加到每个换能器12上,产生沿元件表面22的表面波超声发射束。有利的是,用表面波对工业元件作超声检测便于检测元件表面22,包括探测元件10表面22上的裂纹(表面裂纹)。常规的超声检测方法采用纵向波,因此是一种容量检测工具。表面波波型增强了表面裂纹的探测和检测能能力。
本专业的技术人员将认识到,这里所描述的其他检测技术也有利地结合了这些剪切和表面波波形检测。
C.表面几何形状
现参阅图1和图3说明沿元件10的弯曲表面22(例如锥形、圆柱形或复合半径表面22)以及在材料速度为cw的隔离物18上检测元件10的方法。由于隔离物18的材料速度Vw和元件10的材料速度Vs不匹配,弯曲的表面22通过折射产生二次透镜效应,隔离物18起着像透镜的作用,改变了超声束的特性。该二次透镜效应在图3中示出,它使所得图像的质量下降。该检测方法实施例校正了这种二次透镜效应,并包括调节发射延迟波形以补偿至少一个表面几何形状的效应。发射延迟波形包括一组发射延迟Tk,每个发射延迟包括一个静态表面几何项,可以用费尔马(Fermat)方程计算从同相到达所需焦点P的每个元件12获得能量所需的延迟来确定这一项。该方法还包括用发射延迟波形(Tk)调制多个激励信号脉冲。更具体地说,发射器28从阵列14的一端(k=1)到另一端(k=N)对各第k个激励信号脉冲加每个发射延迟Tk。该方法还包括将各个已调制激励信号脉冲加到形成阵列14的各换能器12上。阵列14与元件10分开相距RW。这样,超声发射束的产生就可沿所选射线路径16从阵列14聚焦到元件10中。通过静态表面几何项,加上发射延迟Tk校正了发射的二次透镜效应。检测方法还包括利用换能器12作为接收元件12产生多个回声信号,并处理在多个频道20中的回声信号。
除了校正了发射的二次透镜效应外,该检测方法还校正了接收的二次透镜效应。因此,回声信号处理包括对在各频道20中的回声信号加延迟波形,以产生多个延迟回声信号,用以波补偿至少一个表面几何效应。与发射延迟波形类似,该延迟波形包括一组接收延迟(Tk),每个接收延迟包括一个静态表面几何项,可以用费尔马方程计算从同相到达所需焦点P的每个元件12获得能量所需的延迟来确定这一项。更具体地说,静态表面几何项对发射和接收是相同的。更具体地说,接收延迟Tk是在数字控制器19的控制下由接收器30从各第k个接收元件12加到回声信号上。
处理回声信号还包括合计来自接收元件12的延迟回声信号,产生一个表面几何效应补偿回声信号。回声信号可以例如在控制器19的控制下在接收器30中合计。
D.单次检测
工业应用通常涉及检测多种元件10的检测,例如坯件和锻件。因此,有效的检测过程对减少检测时间和成本是至关重要的。为了增强检测效率,提供了一种单次检测方法实施例,用于检测具有检测表面22的元件10。单次检测方法结合图4进行说明,包括定位面对元件10的检测表面22的换能器12的阵列14,例如图4所示。阵列14可以直接或经过间隔物18面对检测表面22。此外,阵列14可以径向或轴向与元件10对准。图4中,标有“R”和“A”的阵列14分别径向或轴向与元件10对准。此外,也可以将阵列14形成为沿元件10既径向又轴向地延伸,例如安排成直角(未示出)。单次检测方法还包括激励换能器12,产生沿所选射线路径16从阵列14聚焦到元件10上的超声发射束。利用换能器12作为接收元件12来产生多个回声信号。单次检测方法还包括围绕轴26改变阵列和元件的相对角度定向,重复进行激励换能器12的步骤以及产生多个回声信号。阵列14和元件10的相对角度定向可以用围绕轴26旋转阵列14或旋转元件10的方法来改变。回声信号在多个频道20中处理,形成至少一个已处理的回声信号。虽然处理步骤是按围绕轴26旋转阵列14来列出,但应理解该顺序包括了序列处理和集中处理。对于顺序处理,先适当定位阵列14,激励换能器12,产生一组回声信号并加以处理。然后旋转阵列14,重复激励,产生和处理步骤,得到第二组回声信号,等等。同理,对于集中处理,阵列14围绕轴26的每一次角度增量产生数组回声信号,然后处理这些组的回声信号。得到的已处理回声信号或作为单独的帧显示,或缝合在一起,形成元件的单一图像。
有利的是,用围绕轴26的多个角度增量检测元件10,可以避免阵列14在元件表面22上的平移运动,增加了检测过程的整体效率。根据单次检测方法的一个具体实施例,对应于元件10的最终图像的已处理回声信号是这样获得的:即阵列14和元件10的相对定向仅限于围绕轴26旋转。“限于”的意思是最终图像是在阵列14(或元件10)围绕轴26的一个或多个旋转定向时获得,没有阵列14相对元件10的其它定位。例如,对此实施例,不需要阵列14相对元件10作平移运动。最好,对此实施例,阵列14足够大,以能延伸到元件10上所感兴趣的面积,这样围绕轴26旋转阵列14就能扫描到整个感兴趣的面积。例如,可以使用单个的大阵列或用数个较小的阵列组合在一起。有利的是,该实施例避免了费时又麻烦的阵列14或元件10的重新定位。
按照适用于具有弯曲检测表面22的元件10的更具体的实施例(图4中未示出),定位步骤还包括或直接或通过间隔物18使阵列14的轮廓与弯曲的检测表面22相仿。
E.透射
除了单射线检测外,也可以将元件10定位在发射阵列14和接收阵列14之间来检测元件10,如图6所示。常规是使用单超声探头(未示出)通过透射超声检测来检测元件10。这些探头要移动数次来扫描元件。有利的是,利用阵列14作发射和接收便利于电子扫描元件10,从而不需要检测设备在元件10上作费时的机械运动。
F.投掷和捕捉
另一种常规的检测技术示于图7。如图所示,超声发射束由第一探头42“投掷”到检测元件10中,并被第二探头42“捕捉”。该技术用于裂隙-尖端的折射探测。图示结构用于探测元件10中裂隙40的底部和尖端,而且根据此信息,确定裂隙40的大小。但此技术要求对探头42的机械操纵,因此比较慢也麻烦。用阵列14来代替各单个探头42改进了参阅图7所述的技术。图8和11示出一种改进的“投掷和捕捉”检测方法,在该方法中用单一阵列14既作投掷又作捕捉。更具体地说,阵列14的至少一个换能器12子集受激来发射超声束,且至少一个换能器12子集接收反射的超声能量。各发射和接收换能器12子集在图8和11中以“T”和”R”表示。如图8所示,一个换能器12子集用作发射,一个子集用作接收。对于图11的实施例,一个换能器12子集用作发射,两个子集用作接收。这种单射线投掷和捕捉实施例不限于图8和11所示的具体配置,而可包含单阵列14的任何安排,其中至少一组换能器形成发射的声束,至少另一组换能器12接收来自测试元件10的反射声束。
G.多普勒
已知用超声测量血流,最好能将为监控血流所开发的超声技术延伸到工业应用,例如通过导管或管道(例如化学供料管)或通过仪器管道(已用的例如,用于热交换流)监控产品流。工业应用中的管道、导管及产品在其中流动的其它容器在此统称为“管道”。需要对通过管道的产品流进行检测,是因为在管道壁上的沉积(或积聚)会限制和/或扰乱产品流通过管道。此外,热交换器会阻塞或卡住,引起流限制。超声最好能提供非破坏性,非侵入性的检测方法,以检测和监控这类问题。
结合图9说明检测通过管道50的产品流的方法。该方法包括激励形成阵列14的多个换能器12,以传送超声能量入管道50。例如,由发射器28在控制器19的控制下通过T/R(发射/接收)开关32来激励换能器12。应注意,虽然阵列14在图9中示为与管道50相接触,阵列14和管道50也可以用一种间隔物分开,例如水、其它适宜于将超声能量耦合到管道50和阵列14的液体,或一种靴(未示出)。该方法还包括从反射的超声能量产生多个接收信号,并处理多个频道20中的接收信号。对于图9所示的实施例,接收信号由换能器12作为接收元件12产生。处理包括将接收信号与频率基准进行比较,以确定对反射的超声能量所造成的多个频率偏移。处理例如由受数字控制器19控制的接收器30进行。根据更具体的实施例,处理还包括产生通过管道50的产品流的图像。对于图9的实施例,利用已知的成像软件(未示出)将图像显示在显示器17上。将通过管道的产品流成像,就可探测和监控管道壁上的沉积所引起的流限制。
对于另一个实施例,检测方法还包括将频率偏移转换成声音输出。例如利用已知的声频软件(未示出),例如在GE LOGIQ 9中所提供的,将频率偏移转换成音频输出,再通过至少一个扬声器44发射出去。将频率偏移转换成音频输出为操作员检测通过管道的产品流的问题提供了一种快速手段。
H.全阵列声透射
为增强对工业元件超声检测的信噪比,另一种工业超声检测方法包括全阵列声透射。参阅图10来说明检测元件10的这种方法。该检测方法包括同时激励阵列14中的第一组换能器12,如图10所示。示范的第一组换能器12用有阴影的换能器12表示。信噪比随第一组中包含的换能器12的数量而增加。根据一个具体的实施例,第一组换能器12包括形成阵列14的所有换能器。换句话说,对此具体的实施例,形成阵列14的每个换能器12同时被激励,从而提供全阵列声透射。第一组换能器由(例如)发射器28在数字控制器19的控制下激励。
该检测方法还包括用阵列中的第二组换能器12作为接收元件12从元件10接收一组反散射的超声信号,并利用接收元件12从反散射超声信号产生多个接收信号。根据一个具体的实施例,第二组换能器12包括形成阵列14的所有换能器。该方法还包括处理接收信号以形成一组声束形式图像数据。接收信号可由(例如)接收器30在数字控制器19的控制下进行处理。这些处理步骤是已知的,示范的处理步骤在授予Chiao等人的美国专利号6,048,315,题目为“Method and Apparatus for Ultrasonic Synthetic transmitAperture Imaging Using Orthogonal Complementary Codes”有所说明,此专利已作为参考包括在本文内。
通过同时激励第一组换能器12,元件10的整个感兴趣的区域就可有声穿透,而不需要靠连续激励形成阵列14的换能器12来电子扫描元件10。这样,相对连续驱动形成检测阵列14的换能器12而言,图10所示的方法增加了获得检测数据的速度。成像时间(故而检测时间)的相应减少增加了生产率,这在工业环境中特别有利。应用此方法实施例来检测坯件也很有利,即驱动第一组换能器12一次,坯件10就完全有声透射,相对连续激活换能器12来说减少了检测时间。
I.图像位置
医学应用的超声检测系统很先进,而且提供了许多工业应用所需的特性,例如动态聚焦,动态孔径,操纵,以及多普勒频率偏移。医学应用的先进超声检测系统的实例包括GE LOGIQ 9和GE LOGIQBook。但,医学应用的超声检测系统通常采用基于任意定时基准的预定义扫描速率,以触发一个新图象形成序列。“任意”的意思是指定时基准不与阵列位置相联系。但对于工业应用,最好能识别获得既定帧(图象)的位置,以便在检测后充分表征元件10。所以,上述检测方法最好能获得与阵列14和正被检测的元件之间的相对位置同步的图像(帧)。更具体的说,所采用的定时基准应选择为与阵列14和元件10的相对位置同步。例如可以用编码器来跟踪运动的轴线位置。常用的脉冲/位置同步技术称为“位置脉冲”(pulse onposition”,在机械系统(此处为阵列14)到达下一个数据获取位置时加一个TTL电平脉冲。
如上述,许多医学应用的许多超声检测系统,例如GE LOGIQ 9和GE LOGIQ Book,一般不使图像与获取此图像的位置同步。所以,对于本发明的另一个实施例,将超声检测系统,例如GE LOGIQ 9和GELOGIQ Book,更改为获取与阵列14的机械位置同步的数据。更具体地说,定时输入与输出被改为与位置相关,对医学应用的超声检测系统的示范定时输入包括用于EKG输入或用于脚踏开关(未示出)的电路。
虽然此文仅示出并说明了本发明的某些特性,本专业的技术人员可以作许多更改和变动。所以应理解所附权利要求应覆盖符合本发明真正精神的所有这些更改和变动。
Claims (10)
1.一种检测元件的方法,包括:
(a)激励形成阵列的多个换能器,以产生沿所选的射线路径从阵列聚焦到元件的超声发射束,所述阵列被具有一种材料速度的间隔物从所述元件分隔开;
(b)利用换能器作为接收元件产生多个回声信号;以及
(c)处理多个频道中的所述回声信号,所述处理包括:
(i)沿所述所选的射线路径将所述回声信号动态聚焦到所述元件中至少一个焦点P,其中所述动态聚焦包括:
调节延迟波形,以补偿所述超声发射束在所述元件和所述间隔物之间界面上的折射;
将所述延迟波形加到所述各频道中的所述回声信号,以产生多个延迟的回声信号;
(ii)调节活性接收元件数作为波幅Rs的函数,提供接收动态孔径,其中所述调节活性接收元件数包括补偿超声发射束在元件和间隔物之间界面上的折射;
(iii)合计来自所有所述活性接收元件的所述延迟回声信号,以产生聚焦的回声信号。
2.如权利要求1所述的检测方法,其中所述激励换能器包括对各所述换能器分别加激励信号脉冲,所述检测方法还包括:
(d)以相对表面法线的角度θ沿所述所选射线路径操纵所述超声发射束,所述操纵包括:
(i)调节发射延迟波形以补偿所述超声发射束在所述元件和所述间隔物之间的所述界面上的折射,所述发射延迟波形包括多个发射延迟,各发射延迟包括一个静态操纵项,以及
(ii)用所述发射延迟波形调制所述激励信号脉冲;以及
(e)通过所述将所述延迟波形加到所述各频道的所述回声信号,产生操纵的回声信号,藉以形成所述延迟的回声信号,其中所述延迟波形包括多个接收延迟,各接收延迟包括一个静态操纵项,其中所述调节所述延迟波形调节各所述静态操纵项以补偿所述界面的折射。
3.如权利要求2所述的检测方法,其中所述操纵包括以角度θ和ψ沿所述所选射线路径操纵所述超声发射束。
4.如权利要求1所述的检测方法,其中:
所述换能器的所述激励包括在每个连续激励时间间隔ti将一个单独的信号脉冲加到各所述换能器上,
所述回声信号的所述产生是对每个所述连续激励时间间隔ti进行,
所述动态聚焦包括在每个连续第i个所述激励时间间隔tk期间,将所述回声信号沿所述所选的射线路径动态聚焦到各波幅Ri的多个焦点Pi,
所述调节所述活性接收元件数是作为所述波幅Ri的函数对每个所述连续激励时间间隔ti进行,以及
所有所述活性接收元件的所述延迟回声信号的所述合计是对每个所述连续激励时间间隔进行,以产生对所述各波幅Ri的聚焦回声信号。
5.一种检测元件的方法,包括:
(a)对形成阵列的每个换能器分别加激励脉冲,以产生沿所选的射线路径从阵列聚焦到所述元件的超声发射束,所述阵列用材料速度为vw的间隔物与所述元件分隔开;
(b)以相对表面法线的角度θ沿所述所选射线路径操纵超声发射束,所述操纵包括:
(i)调节发射延迟波形以补偿所述超声发射束在所述元件和所述间隔物之间所述界面上的折射,所述发射延迟波形包括多个发射延迟,各发射延迟包括一个静态操纵项,以及
(ii)用所述发射延迟波形调制所述激励脉冲;
(c)利用所述换能器作为接收元件产生多个回声信号;以及
(d)利用延迟波形处理多个频道的所述回声信号,所述延迟波形包括多个接收延迟,每个接收延迟包括一个静态接收操纵项,所述处理包括:
(i)调节各所述静态接收操纵项以补偿所述超声发射束在所述元件和所述间隔物之间所述界面上的折射;
(ii)对所述各频道的所述回声信号加所述延迟波形,以产生多个延迟回声信号;以及
(iii)合计来自接收元件的延迟回声信号,产生操纵的回声信号。
6.如权利要求4所述的检测方法,其中所述处理步骤还包括:
(iv)调节活性接收元件数作为波幅Rs的函数,以提供接收的动态孔径,其中所述调节接收元件数包括补偿所述超声发射束在所述元件和所述间隔物之间的所述界面上的折射;
其中所述合计步骤包括合计来自所有所述活性接收元件的所述延迟回声信号,以产生所述操纵的回声信号。
7.如权利要求5所述的检测方法,其中所述操纵包括以角度θ和ψ沿所述所选射线路径操纵所述超声发射束。
8.如权利要求5所述的检测方法,其中所述对形成阵列的每个换能器分别加激励脉冲,以产生沿所选的射线路径从阵列聚焦到所述元件的超声发射束的步骤包括对各所述换能器分别加激励脉冲,以产生聚焦到所述元件的剪切波超声发射束。
9.如权利要求5所述的检测方法,其中所述对形成阵列的每个换能器分别加激励脉冲,以产生沿所选的射线路径从阵列聚焦到所述元件的超声发射束的步骤包括对各所述换能器分别加激励脉冲,以产生沿所述元件的所述表面聚焦的表面波超声发射束。
10.一种沿元件的弯曲表面以及在材料速度为vw的间隔物上检测所述元件的方法,所述检测方法包括:
(a)调节发射延迟波形,以补偿至少一个表面几何效应,所述延迟波形包括多个发射延迟,每个所述发射延迟包括一个静态表面几何项;
(b)用所述发射延迟波形调制多个激励信号脉冲;
(c)将所述调制激励信号脉冲加到形成阵列的多个换能器上,所述阵列由所述间隔物使之与所述元件分开,以产生沿所选路径从所述阵列聚焦到所述元件上的超声发射束;
(d)利用所述换能器作为接收元件产生多个回声信号;
(e)处理多个频道的所述回声信号,所述处理包括:
(i)将延迟波形加到所述各频道的所述回声信号上,以产生多个延迟回声信号,以补偿至少一种表面几何效应,所述延迟波形包括多个接收延迟,每个接收延迟包括一个静态表面几何项;以及
(ii)合计来自所述接收元件的所述延迟回声信号,以产生一个表面几何效应补偿回声信号。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/244,637 US6789427B2 (en) | 2002-09-16 | 2002-09-16 | Phased array ultrasonic inspection method for industrial applications |
| US10/244637 | 2002-09-16 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1530651A CN1530651A (zh) | 2004-09-22 |
| CN100338460C true CN100338460C (zh) | 2007-09-19 |
Family
ID=31887826
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB031594212A Expired - Fee Related CN100338460C (zh) | 2002-09-16 | 2003-09-16 | 一种检测元件的方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6789427B2 (zh) |
| EP (1) | EP1398627B1 (zh) |
| JP (1) | JP4414177B2 (zh) |
| CN (1) | CN100338460C (zh) |
| CA (1) | CA2439714C (zh) |
Families Citing this family (91)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AUPR338101A0 (en) * | 2001-02-26 | 2001-03-22 | Colloidal Dynamics Pty. Ltd. | Improved geometry for pulsed acoustic measurements |
| GB2397719B8 (en) * | 2003-01-23 | 2006-05-17 | Rolls Royce Plc | Ultrasonic transudcer structures |
| JP2004283490A (ja) * | 2003-03-25 | 2004-10-14 | Fuji Photo Film Co Ltd | 超音波送受信装置 |
| US6792808B1 (en) * | 2003-04-30 | 2004-09-21 | General Electric Company | Ultrasonic inspection method |
| DE10334902B3 (de) * | 2003-07-29 | 2004-12-09 | Nutronik Gmbh | Verfahren und Schaltungsanordnung zur Verarbeitung von Signalen, die bei der zerstörungsfreien Prüfung von Gegenständen durch Reflexion von Ultraschallwellen erzeugt werden |
| US20060009948A1 (en) * | 2003-10-04 | 2006-01-12 | Dannis Wulf | Method and apparatus for inspecting parts with high frequency linear array |
| US7263888B2 (en) * | 2003-10-16 | 2007-09-04 | General Electric Company | Two dimensional phased arrays for volumetric ultrasonic inspection and methods of use |
| US7817843B2 (en) | 2004-03-04 | 2010-10-19 | The Boeing Company | Manufacturing process or in service defects acoustic imaging using sensor array |
| US7010982B2 (en) * | 2004-04-30 | 2006-03-14 | General Electric Company | Method of ultrasonically inspecting airfoils |
| JP4564286B2 (ja) * | 2004-06-14 | 2010-10-20 | 株式会社東芝 | 3次元超音波画像化装置 |
| US8278799B1 (en) * | 2004-07-27 | 2012-10-02 | Vincent Lupien | System and method for optimizing the design of an ultrasonic transducer |
| US7245063B2 (en) * | 2004-11-12 | 2007-07-17 | Honeywell International, Inc. | Optimized ultrasonic phased array transducer for the inspection of billet material |
| US7234354B2 (en) * | 2004-12-03 | 2007-06-26 | General Electric Company | Ultrasonic probe and inspection method and system |
| US20060144162A1 (en) * | 2005-01-05 | 2006-07-06 | Batzinger Thomas J | Method and apparatus for evaluating fluid flow in a heat exchanger |
| JP5393031B2 (ja) * | 2005-01-21 | 2014-01-22 | フルオー・テクノロジーズ・コーポレイシヨン | ステンレス鋼用超音波フェーズドアレイ装置および方法 |
| US7428842B2 (en) * | 2005-06-20 | 2008-09-30 | Siemens Power Generation, Inc. | Phased array ultrasonic testing system and methods of examination and modeling employing the same |
| EP2148195A1 (en) * | 2005-07-07 | 2010-01-27 | Kabushiki Kaisha Toshiba | Laser-based apparatus for ultrasonic flaw detection |
| US20070006656A1 (en) * | 2005-07-11 | 2007-01-11 | General Electric Company | System and method for monitoring deposition within tubes of a heating system |
| US8001841B2 (en) * | 2005-10-14 | 2011-08-23 | Olympus Ndt | Ultrasonic fault detection system using a high dynamic range analog to digital conversion system |
| US7461554B2 (en) * | 2005-10-14 | 2008-12-09 | Olympus Ndt | Digital time variable gain circuit for non-destructive test instrument |
| US7757557B2 (en) * | 2005-10-14 | 2010-07-20 | Olympus Ndt | Ultrasonic detection measurement system using a tunable digital filter with 4x interpolator |
| CN101017155B (zh) * | 2006-02-07 | 2010-09-08 | 哈尔滨工业大学 | 管节点焊缝超声相控阵检测成像系统 |
| DE102006010010A1 (de) * | 2006-03-04 | 2007-09-06 | Intelligendt Systems & Services Gmbh & Co Kg | Verfahren zur Ultraschallprüfung eines Werkstückes in einem gekrümmten Bereich seiner Oberfläche und zur Durchführung des Verfahrens geeignete Prüfanordnung |
| EP2006675B1 (en) * | 2006-04-05 | 2017-11-01 | Nippon Steel & Sumitomo Metal Corporation | Ultrasonic flaw detection method for a tubular metal body |
| US7454974B2 (en) * | 2006-09-29 | 2008-11-25 | General Electric Company | Probe system, ultrasound system and method of generating ultrasound |
| KR101411099B1 (ko) * | 2006-10-25 | 2014-06-27 | 수퍼 소닉 이매진 | 계면 음향 방사력을 발생시켜 기계적 파동을 발생시키는 방법 |
| DE102006059413A1 (de) * | 2006-12-15 | 2008-06-26 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren und Vorrichtung zur zerstörungsfreien Prüfkörperuntersuchung mittels Ultraschall längs einer nicht ebenen Prüfkörperoberfläche |
| US7581296B2 (en) * | 2007-04-11 | 2009-09-01 | Ge Inspection Technologies, Lp | Acoustic stack for ultrasonic transducers and method for manufacturing same |
| DE102008002859A1 (de) * | 2008-05-28 | 2009-12-03 | Ge Inspection Technologies Gmbh | Vorrichtung und Verfahren zur zerstörungsfreien Prüfung von Gegenständen mittels Ultraschall sowie Verwendung von Matrix-Phased-Array-Prüfköpfen |
| DE102008002860A1 (de) * | 2008-05-28 | 2009-12-03 | Ge Inspection Technologies Gmbh | Verfahren zur zerstörungsfreien Prüfung von Gegenständen mittels Ultraschall |
| CA2640462C (en) * | 2008-10-03 | 2016-06-28 | Zetec, Inc. | System and method for ultrasonic testing |
| EP2380015A4 (en) | 2008-12-30 | 2016-10-26 | Sikorsky Aircraft Corp | NON-DESTRUCTIVE INSPECTION PROCEDURE WITH OBJECTIVE ASSESSMENT |
| US8488813B2 (en) * | 2009-04-01 | 2013-07-16 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Reconfigurable acoustic transducer device |
| KR101175497B1 (ko) * | 2009-11-19 | 2012-08-20 | 삼성메디슨 주식회사 | 초음파 공간 합성 영상을 제공하는 초음파 시스템 및 방법 |
| US8438928B2 (en) | 2010-05-17 | 2013-05-14 | Structural Integrity Associates, Inc. | Apparatus and method for non-destructive testing using ultrasonic phased array |
| CA2766850C (en) | 2010-06-16 | 2020-08-11 | Mueller International, Llc | Infrastructure monitoring devices, systems, and methods |
| JP5458270B2 (ja) * | 2010-07-09 | 2014-04-02 | 独立行政法人土木研究所 | 水中構造物点検システム及び画像処理装置 |
| US8680745B2 (en) | 2010-07-21 | 2014-03-25 | General Electric Company | Device for measuring material thickness |
| US8264129B2 (en) | 2010-07-21 | 2012-09-11 | General Electric Company | Device and system for measuring material thickness |
| EP2651306B1 (en) * | 2010-12-13 | 2021-10-20 | Koninklijke Philips N.V. | Ultrasonic acoustic radiation force excitation for ultrasonic material property measurement and imaging |
| WO2012103628A1 (en) * | 2011-02-03 | 2012-08-09 | Absolute Nde International Inc. | Method for ultrasonic inspection of welds |
| EP2527829A1 (de) * | 2011-05-24 | 2012-11-28 | Siemens Aktiengesellschaft | Vorrichtung und Verfahren zur Ultraschallprüfung eines Werkstücks |
| JP5889742B2 (ja) * | 2011-07-15 | 2016-03-22 | 株式会社東芝 | 超音波探傷装置及びその方法 |
| US9772250B2 (en) | 2011-08-12 | 2017-09-26 | Mueller International, Llc | Leak detector and sensor |
| US9279786B2 (en) * | 2011-08-23 | 2016-03-08 | Olympus Ndt | Method of and an apparatus conducting calibration for phased-array shear wave channels inspecting square bars |
| JP5840910B2 (ja) * | 2011-10-17 | 2016-01-06 | 日立Geニュークリア・エナジー株式会社 | 超音波探傷方法 |
| US9213019B2 (en) * | 2011-11-18 | 2015-12-15 | General Electric Company | Method of determining a size of a defect using an ultrasonic linear phased array |
| US8972206B2 (en) | 2012-01-26 | 2015-03-03 | General Electric Company | Phased array scanning into a curvature |
| US10429356B2 (en) | 2012-01-31 | 2019-10-01 | General Electric Company | Method and system for calibrating an ultrasonic wedge and a probe |
| US9110000B2 (en) * | 2012-02-17 | 2015-08-18 | General Electric Company | Method and system for determining the position of an ultrasonic wedge and a probe |
| US8857261B2 (en) | 2012-04-12 | 2014-10-14 | General Electric Company | Sensing device and method of attaching the same |
| DE202012004305U1 (de) * | 2012-04-27 | 2012-05-25 | Texmag Gmbh Vertriebsgesellschaft | Vorrichtung zum Detektieren einer Kante einer Materialbahn |
| US9500627B2 (en) | 2012-06-26 | 2016-11-22 | The Boeing Company | Method for ultrasonic inspection of irregular and variable shapes |
| US9939344B2 (en) | 2012-10-26 | 2018-04-10 | Mueller International, Llc | Detecting leaks in a fluid distribution system |
| US20140260628A1 (en) * | 2013-03-15 | 2014-09-18 | Westinghouse Electric Company Llc | Ultrasonic examination of components with unknown surface geometries |
| FR3003646B1 (fr) * | 2013-03-21 | 2015-04-03 | V & M France | Dispositif et procede de controle non destructif de produits tubulaires, notamment sur site |
| US9080951B2 (en) * | 2013-03-29 | 2015-07-14 | Olympus Scientific Solutions Americas Inc. | Method and system of using 1.5D phased array probe for cylindrical parts inspection |
| US9304114B2 (en) * | 2013-04-11 | 2016-04-05 | The Boeing Company | Ultrasonic inspection using incidence angles |
| US9746445B2 (en) * | 2013-04-16 | 2017-08-29 | The Boeing Company | Apparatus for automated non-destructive inspection of airfoil-shaped bodies |
| US9343898B2 (en) * | 2013-07-19 | 2016-05-17 | Texas Instruments Incorporated | Driver current control apparatus and methods |
| EP2887060A1 (en) * | 2013-12-20 | 2015-06-24 | Nederlandse Organisatie voor toegepast- natuurwetenschappelijk onderzoek TNO | Ultrasonic pipeline inspection system and method |
| US9671373B2 (en) * | 2014-03-14 | 2017-06-06 | Koch Heat Transfer Company, Lp | System and method for testing shell and tube heat exchangers for defects |
| US10378892B2 (en) | 2014-04-21 | 2019-08-13 | Lockheed Martin Corporation | System and method for inspecting surface flushness |
| CN104034802B (zh) * | 2014-06-03 | 2016-04-27 | 艾因蒂克检测科技(上海)有限公司 | 一种提升面阵探头分辨率的检测方法 |
| US9528903B2 (en) | 2014-10-01 | 2016-12-27 | Mueller International, Llc | Piezoelectric vibration sensor for fluid leak detection |
| US10908130B2 (en) * | 2014-10-01 | 2021-02-02 | Sensor Networks, Inc. | Asset integrity monitoring using cellular networks |
| US9625424B2 (en) * | 2015-02-13 | 2017-04-18 | Olympus Scientific Solutions Americas Inc. | System and a method of automatically generating a phased array ultrasound scan plan for non-destructive inspection |
| CA2978468C (en) | 2015-02-17 | 2023-08-01 | General Electric Company | Method for inspecting a weld seam with ultrasonic phased array |
| US20160258904A1 (en) * | 2015-03-04 | 2016-09-08 | Bp Corporation North America Inc. | Process Control |
| US10018113B2 (en) * | 2015-11-11 | 2018-07-10 | General Electric Company | Ultrasonic cleaning system and method |
| US10305178B2 (en) | 2016-02-12 | 2019-05-28 | Mueller International, Llc | Nozzle cap multi-band antenna assembly |
| US10283857B2 (en) | 2016-02-12 | 2019-05-07 | Mueller International, Llc | Nozzle cap multi-band antenna assembly |
| FR3051693B1 (fr) * | 2016-05-31 | 2018-05-11 | Imasonic | Reseau d'elements transducteurs ultrasonores |
| FR3062212B1 (fr) * | 2017-01-25 | 2021-10-29 | Safran | Procede et dispositif de controle de pieces par ultrasons multielements |
| CN107328866B (zh) * | 2017-02-27 | 2019-10-08 | 陕西师范大学 | 一种超声相控阵探头阵列的修复校正方法 |
| CN109283258B (zh) * | 2017-07-19 | 2020-07-17 | 中国科学院声学研究所 | 一种基于超声相控阵的检测系统 |
| CN108375630A (zh) * | 2018-01-28 | 2018-08-07 | 北京工业大学 | 一种板结构表面缺陷无损检测方法 |
| CN108542476A (zh) * | 2018-05-14 | 2018-09-18 | 潍坊科技学院 | 一种可以自动定位的胸腔穿刺引流装置 |
| US10859462B2 (en) | 2018-09-04 | 2020-12-08 | Mueller International, Llc | Hydrant cap leak detector with oriented sensor |
| JP7201819B2 (ja) * | 2018-12-18 | 2023-01-10 | インサイテック・リミテッド | エコーベースの集束補正 |
| US11342656B2 (en) | 2018-12-28 | 2022-05-24 | Mueller International, Llc | Nozzle cap encapsulated antenna system |
| US11473993B2 (en) | 2019-05-31 | 2022-10-18 | Mueller International, Llc | Hydrant nozzle cap |
| US11389135B2 (en) * | 2019-06-27 | 2022-07-19 | Cassandra L. Bates | Breast imaging ultrasound systems and methods |
| GB201911201D0 (en) * | 2019-08-06 | 2019-09-18 | Darkvision Tech | Methods and apparatus for coiled tubing inspection by ultrasound |
| WO2021044317A1 (en) | 2019-09-05 | 2021-03-11 | Khalifa University of Science and Technology | Inline demulsification device |
| CN110507362B (zh) * | 2019-09-09 | 2023-06-23 | 邹金沙 | 一种产轴线构建方法、胎头位置测量方法及装置 |
| US11525810B2 (en) | 2020-02-20 | 2022-12-13 | The Boeing Company | Method for ultrasonic inspection of structure having radiused surface using multi-centric radius focusing |
| US11542690B2 (en) | 2020-05-14 | 2023-01-03 | Mueller International, Llc | Hydrant nozzle cap adapter |
| US20220117584A1 (en) * | 2020-10-20 | 2022-04-21 | GE Precision Healthcare LLC | System And Method Of Signal Processing For Ultrasound Arrays With Mechanically Adjustable Transducer Shapes |
| CN113714200B (zh) * | 2021-09-09 | 2022-08-26 | 南京大学 | 偏转聚焦去除管道栓塞物的可视化超声装置及控制方法 |
| GB2617404A (en) * | 2022-04-08 | 2023-10-11 | Darkvision Tech Inc | Industrial ultrasonic inspection with sparse receive |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4471785A (en) * | 1982-09-29 | 1984-09-18 | Sri International | Ultrasonic imaging system with correction for velocity inhomogeneity and multipath interference using an ultrasonic imaging array |
| CN1191970A (zh) * | 1996-12-30 | 1998-09-02 | 通用电气公司 | 为超声波束形成器提供动态可变时延的方法和设备 |
| CN1214901A (zh) * | 1997-09-22 | 1999-04-28 | 通用电气公司 | 超声图象的相干滤波的方法和装置 |
Family Cites Families (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3210332A (en) * | 1963-05-03 | 1965-10-05 | Phillips Petroleum Co | Production of solid olefin polymers |
| US4180790A (en) | 1977-12-27 | 1979-12-25 | General Electric Company | Dynamic array aperture and focus control for ultrasonic imaging systems |
| US4180791A (en) | 1978-03-09 | 1979-12-25 | General Electric Company | Simplified sector scan ultrasonic imaging system |
| US4317369A (en) * | 1978-09-15 | 1982-03-02 | University Of Utah | Ultrasound imaging apparatus and method |
| JPS57147063A (en) * | 1981-03-06 | 1982-09-10 | Hitachi Ltd | Ultrasonic doppler flow meter |
| US4660419A (en) * | 1983-10-03 | 1987-04-28 | Trw Inc. | Reference standard for calibration of ultrasonic arrays |
| US4523468A (en) * | 1983-10-03 | 1985-06-18 | Trw Inc. | Phased array inspection of cylindrical objects |
| US4718277A (en) * | 1985-12-12 | 1988-01-12 | Sound Optics Systems, Inc. | Method and apparatus for characterizing defects in tubular members |
| JPH02500464A (ja) * | 1987-06-11 | 1990-02-15 | オーストラリア国 | 超音波ビーム補償のための方法と装置 |
| US5014712A (en) | 1989-12-26 | 1991-05-14 | General Electric Company | Coded excitation for transmission dynamic focusing of vibratory energy beam |
| US5111695A (en) | 1990-07-11 | 1992-05-12 | General Electric Company | Dynamic phase focus for coherent imaging beam formation |
| US5235982A (en) | 1991-09-30 | 1993-08-17 | General Electric Company | Dynamic transmit focusing of a steered ultrasonic beam |
| US5230340A (en) | 1992-04-13 | 1993-07-27 | General Electric Company | Ultrasound imaging system with improved dynamic focusing |
| US5463905A (en) * | 1993-02-23 | 1995-11-07 | Baird; James D. | Portable non-invasive flowmeter for partially filled pipe |
| US5497662A (en) * | 1993-09-07 | 1996-03-12 | General Electric Company | Method and apparatus for measuring and controlling refracted angle of ultrasonic waves |
| US5329930A (en) | 1993-10-12 | 1994-07-19 | General Electric Company | Phased array sector scanner with multiplexed acoustic transducer elements |
| US5345939A (en) | 1993-11-24 | 1994-09-13 | General Electric Company | Ultrasound imaging system with dynamic window function |
| DE4405504B4 (de) | 1994-02-21 | 2008-10-16 | Siemens Ag | Verfahren und Vorrichtung zum Abbilden eines Objekts mit einem 2-D-Ultraschallarray |
| US6035696A (en) * | 1994-04-05 | 2000-03-14 | Gas Research Institute | Scan assembly and method for calibrating the width of an input pulse to an ultrasonic transducer of the scan assembly |
| US5431054A (en) * | 1994-04-07 | 1995-07-11 | Reeves; R. Dale | Ultrasonic flaw detection device |
| US5490512A (en) | 1994-06-16 | 1996-02-13 | Siemens Medical Systems, Inc. | Elevation direction focusing in ultrasound transducer arrays |
| US5406949A (en) * | 1994-07-18 | 1995-04-18 | Siemens Medical System | Digital processing for steerable CW doppler |
| US5793701A (en) * | 1995-04-07 | 1998-08-11 | Acuson Corporation | Method and apparatus for coherent image formation |
| US5487306A (en) | 1994-09-26 | 1996-01-30 | General Electric Company | Phase aberration correction in phased-array imaging systems |
| US5568813A (en) | 1994-11-23 | 1996-10-29 | General Electric Company | Method for combining ultrasound vector data from multiple firings to improve image quality |
| US5606972A (en) * | 1995-08-10 | 1997-03-04 | Advanced Technology Laboratories, Inc. | Ultrasonic doppler measurement of blood flow velocities by array transducers |
| JP3714960B2 (ja) | 1995-09-29 | 2005-11-09 | シーメンス アクチエンゲゼルシヤフト | 軸に焼き嵌めされた円板の超音波探傷検査方法及び装置 |
| US5740806A (en) | 1996-03-29 | 1998-04-21 | Siemens Medical Systems, Inc. | Dynamic receive aperture transducer for 1.5D imaging |
| DE19628028A1 (de) | 1996-07-11 | 1998-01-22 | Siemens Ag | Prüfvorrichtung und Verfahren zur zerstörungsfreien Werkstoffprüfung |
| DE19637424A1 (de) | 1996-09-13 | 1998-03-26 | Siemens Ag | Verfahren zum Erzeugen horizontal polarisierter transversaler Ultraschallwellen zur zerstörungsfreien Werkstoffprüfung und Prüfvorrichtung |
| US5891038A (en) | 1996-12-30 | 1999-04-06 | General Electric Company | Method, apparatus and applications for combining transmit wave functions to obtain synthetic waveform in ultrasonic imaging system |
| US5853367A (en) | 1997-03-17 | 1998-12-29 | General Electric Company | Task-interface and communications system and method for ultrasound imager control |
| US5897501A (en) | 1997-05-07 | 1999-04-27 | General Electric Company | Imaging system with multiplexer for controlling a multi-row ultrasonic transducer array |
| US5817023A (en) | 1997-05-12 | 1998-10-06 | General Electrical Company | Ultrasound imaging system with dynamic window function generator |
| US5902241A (en) | 1997-11-24 | 1999-05-11 | General Electric Company | Large-aperture imaging using transducer array with adaptive element pitch control |
| JPH11183446A (ja) * | 1997-12-25 | 1999-07-09 | Nkk Corp | 溶接部の超音波探傷方法および装置 |
| AUPP227898A0 (en) * | 1998-03-11 | 1998-04-09 | Commonwealth Scientific And Industrial Research Organisation | Improvements in ultrasound techniques |
| US6210332B1 (en) | 1998-03-31 | 2001-04-03 | General Electric Company | Method and apparatus for flow imaging using coded excitation |
| DE19834587C1 (de) | 1998-07-31 | 2000-04-20 | Siemens Ag | Verfahren und Vorrichtung zur Detektion eines Risses in einem Eisenbahnrad |
| US6048315A (en) | 1998-09-28 | 2000-04-11 | General Electric Company | Method and apparatus for ultrasonic synthetic transmit aperture imaging using orthogonal complementary codes |
| US5951479A (en) | 1998-09-29 | 1999-09-14 | General Electric Company | Method and apparatus for synthetic transmit aperture imaging |
| US6183419B1 (en) | 1999-02-01 | 2001-02-06 | General Electric Company | Multiplexed array transducers with improved far-field performance |
| US6296612B1 (en) | 1999-07-09 | 2001-10-02 | General Electric Company | Method and apparatus for adaptive wall filtering in spectral Doppler ultrasound imaging |
| US6056693A (en) | 1999-08-16 | 2000-05-02 | General Electric Company | Ultrasound imaging with synthetic transmit focusing |
| EP1109017A1 (de) | 1999-12-15 | 2001-06-20 | Siemens Aktiengesellschaft | Verfahren zur Ultraschallprüfung einer Schweissnaht eines geschweissten Turbinenläufers |
| US6436044B1 (en) | 2000-02-14 | 2002-08-20 | Siemens Medical Solutions Usa, Inc. | System and method for adaptive beamformer apodization |
| US6568271B2 (en) * | 2001-05-08 | 2003-05-27 | Halliburton Energy Services, Inc. | Guided acoustic wave sensor for pipeline build-up monitoring and characterization |
-
2002
- 2002-09-16 US US10/244,637 patent/US6789427B2/en not_active Expired - Fee Related
-
2003
- 2003-09-04 CA CA2439714A patent/CA2439714C/en not_active Expired - Fee Related
- 2003-09-12 JP JP2003320679A patent/JP4414177B2/ja not_active Expired - Fee Related
- 2003-09-16 CN CNB031594212A patent/CN100338460C/zh not_active Expired - Fee Related
- 2003-09-16 EP EP03255786A patent/EP1398627B1/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4471785A (en) * | 1982-09-29 | 1984-09-18 | Sri International | Ultrasonic imaging system with correction for velocity inhomogeneity and multipath interference using an ultrasonic imaging array |
| CN1191970A (zh) * | 1996-12-30 | 1998-09-02 | 通用电气公司 | 为超声波束形成器提供动态可变时延的方法和设备 |
| CN1214901A (zh) * | 1997-09-22 | 1999-04-28 | 通用电气公司 | 超声图象的相干滤波的方法和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1398627B1 (en) | 2012-07-11 |
| CA2439714C (en) | 2010-03-30 |
| CN1530651A (zh) | 2004-09-22 |
| US20040050166A1 (en) | 2004-03-18 |
| CA2439714A1 (en) | 2004-03-16 |
| EP1398627A2 (en) | 2004-03-17 |
| JP2004109129A (ja) | 2004-04-08 |
| JP4414177B2 (ja) | 2010-02-10 |
| US6789427B2 (en) | 2004-09-14 |
| EP1398627A3 (en) | 2004-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100338460C (zh) | 一种检测元件的方法 | |
| CN102621223B (zh) | 一种基于声波时间反转法的超声扫描与检测方法 | |
| KR101144692B1 (ko) | 초음파에 의한 단면 검사 방법 및 장치 | |
| CN1184474C (zh) | 为超声波束形成器提供动态可变时延的方法和设备 | |
| JP2004109129A5 (zh) | ||
| CN1129401C (zh) | 超声诊断设备 | |
| NL1032186C2 (nl) | Systeem voor het meten aan een wand van een pijpleiding met phased array. | |
| EP1462819A3 (en) | Ultrasonic imaging apparatus with multiple transmit beams and reduced sidelobes | |
| JP4542814B2 (ja) | 超音波検査方法 | |
| CN105738478B (zh) | 基于线性阵列聚焦‑时间反转的钢板Lamb波检测成像方法 | |
| CN111175381A (zh) | 基于全矩阵数据的复合构件界面快速成像定量检测方法 | |
| EP1235080A2 (en) | Ultrasonic imaging method and ultrasonic imaging apparatus | |
| CN1310037C (zh) | 用于获得图像的方法、系统和探测器 | |
| CN103837601A (zh) | 一种宽带导波相控阵聚焦扫描方法及系统 | |
| US7331234B2 (en) | Ultrasonic imaging method and ultrasonic imaging apparatus | |
| CN101060812A (zh) | 超声波摄像装置 | |
| JP3704070B2 (ja) | 超音波探傷装置 | |
| US6640633B2 (en) | Ultrasonic imaging method and ultrasonic imaging apparatus | |
| US20120210795A1 (en) | Two-dimensional virtual array probe for three-dimensional ultrasonic imaging | |
| WO2001050961A1 (fr) | Appareil de diagnostic ultrasonore | |
| JP2008510977A (ja) | 少なくとも1つの圧電性フィルムを使用し透過によって超音波イメージを形成するためのシステム | |
| CN104359980B (zh) | 一种锯齿形柱状超声相控阵换能器 | |
| CN113994204B (zh) | 超声波探伤方法、超声波探伤装置、以及钢材的制造方法 | |
| RU2799111C1 (ru) | Способ ультразвуковой томографии | |
| JP5145783B2 (ja) | 超音波による断面検査方法及び装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20070919 Termination date: 20150916 |
|
| EXPY | Termination of patent right or utility model |