CN101852992B - 光学位置确定设备及方法 - Google Patents
光学位置确定设备及方法 Download PDFInfo
- Publication number
- CN101852992B CN101852992B CN2010101134518A CN201010113451A CN101852992B CN 101852992 B CN101852992 B CN 101852992B CN 2010101134518 A CN2010101134518 A CN 2010101134518A CN 201010113451 A CN201010113451 A CN 201010113451A CN 101852992 B CN101852992 B CN 101852992B
- Authority
- CN
- China
- Prior art keywords
- substrate
- alignment mark
- detector
- along
- detectors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/20—Exposure; Apparatus therefor
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7088—Alignment mark detection, e.g. TTR, TTL, off-axis detection, array detector, video detection
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70216—Mask projection systems
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70425—Imaging strategies, e.g. for increasing throughput or resolution, printing product fields larger than the image field or compensating lithography- or non-lithography errors, e.g. proximity correction, mix-and-match, stitching or double patterning
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
Abstract
本发明提供一种光学位置确定设备及方法。具体地,提供一种光刻设备,包括:框架;支撑衬底的衬底平台,该衬底在其表面上设有对准标记;驱动装置,所述驱动装置沿第一方向移动衬底平台;以及多个对准标记探测器,所述多个对准标记探测器耦合到该框架并能够沿与第一方向垂直的第二方向移动。
Description
技术领域
本发明涉及一种光刻设备及器件制造方法。
背景技术
光刻设备是一种把所需图形应用到衬底目标部分上的机器。光刻设备可以用于,例如集成电路(IC)、平板显示器以及涉及精细结构的其它器件的制造。在传统的光刻设备中,可以使用或者可称为掩模或光刻版的图形化装置,以产生与IC(或其它器件)的单个层相应的电路图形,该图形可以被成像到具有辐射敏感材料层(例如抗蚀剂)的衬底(例如硅晶片、玻璃板等)的目标部分(例如包含一个或几个芯片的部分)。代替掩模,图形化装置可包括用于产生电路图形的、单独可控制元件阵列。
通常,单个衬底会包括连续被曝光的相邻目标部分的网络。已知的光刻设备包括步进式光刻机(stepper),其中通过一次性将整个图形曝光到每个目标部分一次来辐射该目标部分,以及扫描器(scanner),其中通过沿特定方向(“扫描”方向)的射束扫描图形,同时平行或反平行于这个方向同步扫描衬底,从而辐射各个目标部分。
可以理解,无论光刻设备工作于步进模式或扫描模式,都需要将一个或多个图形化的光束引导到衬底表面恰当的目标部分上。在许多情形下,一系列的光刻处理步骤的结果为,在衬底的表面上构建出多层结构。当然,理想的是衬底内形成的连续各层彼此正确地对准。因此,需要非常小心以确保衬底和投影束投影系统的相对位置是精确已知的。
使用各种技术确定衬底相对于射束投影系统的位置。这些技术通常依赖于在其上形成了对准标记的衬底,这些对准标记围绕将在其上形成有源电路元件等的衬底区域的外围排列。定位这些标记以提供参考点,相对于这些参考点确定衬底上目标部分的位置。使用射束投影系统可以光学地探测该对准标记,该系统也用于将图形投影到衬底上。定位对准标记这一问题的这种“通过透镜”或TTL方法使得位置测量定位和图像信息定位相同。因此,“Abbe”误差最小化。在其它系统中,对准标记探测器和主射束投影系统具有不同的光轴,这种情况下可提供某些装置以补偿这些轴之间的相对移动。
在基于扫描的系统的示例中,由于是通过移动衬底跨过衬底的表面扫描支撑射束投影系统的框架以及对准标记探测器,所以依赖于测量到的对准标记的位置而调整衬底在垂直于扫描方向上的位置以及扫描速度。可选择地或者另外,可以调整待投影的数字图像。在图形化装置包含单独可控制元件阵列的情形中,这涉及平移或者以其它方式调整作用于该阵列的数字图形。也可以使用特定类型的水平传感器装置控制衬底的高度。
典型地,特定生产设备的光刻设备被设计(或以相对死板的方式构造)成适用于固定尺寸的衬底。对于平板显示器或者滤色板,衬底尺寸可能大约为几米,每个衬底上形成多个面板。对准标记设在衬底外围的周围以及各面板之间。然而,需要对面板在衬底上的布局中引入灵活性,使得特定的生产设备可用于生产尺寸不同的面板。这意味着对于非标准的面板布局,要么只能使用衬底外围周围的对准标记(因为外围部分是所有衬底布局所共有的唯一“空白”区域),要么必须对探测器执行一些手动重新对准。虽然对准标记探测器的连续阵列扫过衬底以探测位于各种中间位置的对准标记可能是理想的,但是由于要求非常高的分辨率以及所需探测器的数目而使得这是不现实的。
诸如热效应的许多因素可导致衬底形状的局部变化。因此理想的是在衬底表面上提供间距相对较小的对准标记。然而,前述段落中所描述的方法妨碍了这一点,因为衬底的整个中心区域无法有效地用于放置对准标记。
因此,需要在待图形化的衬底中心区域内能实现对准标记的灵活定位的光刻设备和方法。
发明内容
根据本发明的第一方面,提供了一种光刻设备,该设备包含衬底平台、框架、一个或者多个投影系统、一个或者多个对准标记探测器、以及位置传感器。衬底平台支撑在表面上设有对准标记的衬底。框架可相对衬底移动。一个或多个投影系统将图形化射束投影到衬底的目标部分上。每个投影系统与该框架连接。一个或者多个对准标记探测器与该框架连接并可相对框架移动。位置传感器和每个对准标记探测器是相关联的,并确定探测器相对于框架或投影系统的位置。
在本实施例中,本发明使得在稳定工作配置下使用单个光刻设备生产具有各种不同尺寸的面板或者其它器件成为可能。对准标记探测器可相对支撑该探测器以及投影系统的框架移动,以便允许在衬底的中心区域内具有位于不同地点置的对准标记。将投影系统与衬底对准不再需要只依赖于外围对准标记。因此可以实现改善的生产准确性和灵活性。
将会理解,通过移动框架或衬底或者同时移动框架和衬底,可使框架相对衬底移动。
在一个示例中,该框架可相对衬底沿平行于衬底平面的第一线性移动轴-“扫描方向”移动。每个对准探测器则可相对框架沿第二线性轴移动,该第二线性轴基本上垂直于第一轴,并也位于和衬底平面平行的平面内。
在一个示例中,每个对准标记探测器的移动范围足够大,使得可基本上沿第二轴方向覆盖衬底的整个尺寸。对于多个探测器的情形,这些探测器的移动并不交叠。每个探测器设成提供表示所探测的对准标记的位置的输出信号。
在一个示例中,每个对准标记可包含用于提供对准辐射束的照明系统、用于将对准束投影到衬底目标部分的投影系统、以及用于探测从衬底反射的辐射的传感器。
在一个示例中,每个位置传感器可包含激光干涉仪。在一个示例中,该激光干涉仪包含相对于相关对准标记探测器固定的反射器或者反射镜面,以及相对于框架被固定的激光器和辐射探测器。或者,可以使用线性光栅系统。
在一个示例中,该光刻设备可包含和每个对准标记探测器相关联的线性电机,该电机提供探测器相对框架的线性移动;该设备还包含耦合到每个线性电机以根据操作人员输入而控制该电机的位置的控制装置。
在一个示例中,该光刻设备可包含用于接收该/每个位置传感器的输出以及该/每个对准标记探测器的输出。根据接收到的信号,该控制器被设置成调整衬底相对于框架的位置与/或衬底的扫描速度与/或该/每个投影系统所产生的图形化射束。
根据本发明的另一个方面,提供了将衬底和光刻设备的一个或者多个投影系统对准的方法。每个投影系统被固定到可相对衬底移动的框架上。该方法包含下述步骤:确定设在衬底表面上的对准标记的近似位置,将一个或者多个对准标记探测器相对于该框架或(多个)投影系统移动到可探测到对准标记的位置。
在一个示例中,移动一个或者多个对准标记探测器的步骤包含监测一个或者多个探测器位置传感器的输出以提供探测器位置反馈,该(多个)位置传感器被固定到该框架与/或(多个)对准标记探测器。
在一个示例中,移动一个或者多个对准标记探测器的步骤包含向和每个对准标记探测器相关联的线性驱动机械装置施加驱动信号。每个线性驱动机械装置可包含线性电机。
在各种示例中,本发明适用于依赖掩模或者单独可控制元件阵列而将图形传递给图形束的光刻设备。
下面将参考附图详细地描述本发明的另外实施例、特征、和优点以及本发明的各个实施例的结构和操作。
附图说明
这里使用附图,它形成了本说明书的一部分并阐述了本发明;附图和相关描述一起进一步用于解释本发明的原理并使本领域的技术人员能够制造和使用本发明。
图1描述了根据本发明一个实施例的光刻设备。
图2阐述了根据本发明一个实施例的扫描光刻设备的俯视图。
图3阐述了沿箭头A方向观察的图2的设备的侧视图。
图4示意性阐述了根据本发明一个实施例的对准标记。
图5和6阐述了根据本发明各种实施例,具有各种面板布局的衬底的俯视图。
图7为阐述根据本发明一个实施例的操作方法的流程图。
现在将结合附图描述本发明。在附图中,相同的数字表示相同的元件或功能相近的元件。
具体实施方式
概述和术语
尽管在本说明书中会具体地参考在集成电路(IC)制造中光刻设备的使用,但应该理解,这里描述的光刻设备可以具有其它用途,例如集成光学系统、用于磁畴存储器的引导和探测图形、平板显示器、薄膜磁头等的制造。技术人员将了解到,在这些可选应用的情况中,使用术语“晶片”或“芯片”可以分别看作与更普通的术语“衬底”或“目标部分”同义。这里所指的衬底在曝光之前或曝光之后可以在例如涂布显影机(track)(例如,通常把抗蚀剂层涂敷到衬底上并对曝光后的抗蚀剂进行显影的一种工具)或测量或检查工具内进行处理。在本发明可应用的场合中,这里所公开的内容可应用于这些以及其它衬底处理工具。此外,例如,为了创建一个多层IC,可以不止一次地处理衬底,因此这里使用的衬底这个术语也可指已经包括多个已处理过的层的衬底。
这里所使用的术语“单独可控制元件阵列”应广义地理解为是指,可以用来向入射的辐射束赋予图形化的截面,使得可以在衬底的目标部分中创建所需图形的任何装置。在这里的上下文中也可以使用术语“光阀”及“空间光调制器(SLM)”。下面讨论了这些图形化装置的例子。
可编程反射镜阵列包括具有粘弹性控制层和反射表面的矩阵可寻址表面。该设备的基本原理为,例如,反射表面的寻址区域把入射光反射为衍射光,而未寻址区域把入射光反射为非衍射光。使用适当的空间过滤器,可以把所述非衍射光从反射束中过滤出来,只留下衍射光到达衬底。按照这个方式,根据矩阵可寻址表面的寻址图形对射束进行图形化。
将会理解,作为可替换的方式,过滤器可以过滤出衍射光,只留下非衍射光到达衬底。也可以按照相应的方式使用衍射光学微机电系统(MEMS)阵列。每个衍射光学MEMS器件包括多个反射带,这些反射带可以相对于彼此发生变形并形成把入射光反射为衍射光的光栅。
可编程反射镜阵列的另一个可供选择的实施例则包括采用微小反射镜矩阵排列的可编程反射镜阵列,通过施加合适的局部电场或采用压电致动装置可使每个反射镜单独绕一个轴倾斜。同样,反射镜为矩阵可寻址的,使得寻址反射镜把入射光反射到与未寻址反射镜不同的方向;按照这个方式,根据矩阵可寻址反射镜的寻址图形对被反射的射束进行图形化。使用适当的电子装置可以执行所要求的矩阵寻址。
在上述两个情况中,单独可控制元件阵列可包括一个或多个可编程反射镜阵列。例如,在美国专利US 5,296,891与US 5,523,193以及PCT专利申请WO 98/38597与WO 98/33096中可以找到关于这里提到的反射镜阵列的更多信息,这些专利在此被引用作为参考。
也可以使用可编程的LCD阵列。美国专利US 5,229,872给出了采用这种结构的示例,该专利在此被引用作为参考。
应该了解的是,在采用例如特征预偏置、光学邻近校正特征、相位变化技术、以及多次曝光技术时,单独可控制元件阵列上“显示”的图形可能基本上不同于最终转移到衬底层或衬底上的层的图形。类似地,最终形成在衬底上的图形不能与任一时刻在单独可控制元件阵列上形成的图形相对应。在如下设置中情况可能如此:形成在衬底各个部分上的最终图形是经过特定的时间段或由特定次数的曝光而逐步形成,而其间单独可控制元件阵列上的图形和/或衬底的相对位置发生变化。
尽管在本说明书中会具体地参考在IC制造中光刻设备的使用,但应该了解到,这里描述的光刻设备可以具有其它应用,例如诸如,DNA芯片、MEMS、MOEMS、集成光学系统、用于磁畴存储器的引导和探测图形、平板显示器、薄膜磁头等的制造。技术人员将了解到,在这些可供选择的应用的情况中,使用术语“晶片”或“芯片”可以分别看作与更普通的术语“衬底”或“目标部分”同义。这里所指的衬底在曝光之前或曝光之后可以在例如涂布显影机(通常把抗蚀剂层涂敷到衬底上并对曝光后抗蚀剂进行显影的一种工具)或测量或检查工具内进行处理。在本发明可应用的场合中,本说明书内容可应用于这些以及其它衬底处理工具。此外,例如,为了创建一个多层IC,可以不止一次地处理衬底,因此这里使用的衬底这个术语也可指已经包括多个已处理过的层的衬底。
这里使用的术语“辐射”及“射束”包括所有类型的电磁辐射,包括紫外(UV)辐射(例如,波长为365、248、193、157、或126nm)与极紫外(EUV)辐射(例如,波长范围为5至20nm),以及例如离子束或电子束的粒子束。
这里使用的术语“投影系统”应广泛地理解成包括各种类型的投影系统,例如为了适用于所使用的曝光辐射或者诸如使用渍液或使用真空的其它因素,包括折射光学系统、反射光学系统、以及反射折射光学系统。可以认为,这里使用的术语“透镜”与更为普通的术语“投影系统”同义。
照明系统也可包括各种类型的光学元件,包括用于导向、整形、或控制辐射束的折射、反射、及反射折射光学元件,下文中也统一地或个别地将该元件称为“透镜”。
光刻设备可以具有两个衬底平台(双级)或更多衬底平台(和/或两个或更多个掩模平台)。在这些“多级”的机器中,可以并行地使用另外的平台,当一个或多个平台用于曝光时,可以在一个或多个其它平台上进行准备步骤。
光刻设备也可以是这样的类型:其中衬底浸没在具有相对较高折射率的液体(例如水)中,从而填充投影系统最终元件与衬底之间的间隙。浸液也可用于光刻设备中的其它间隙,例如掩模与投影系统第一元件之间的间隙。在本技术领域中,用于提高投影系统数值孔径的浸没技术是众所周知的。
另外,可以为该设备提供流体处理单元,以允许流体和衬底的被辐照部分之间相互作用(例如选择性地在衬底上粘附化学物质或选择性地修改衬底表面的结构)。
光刻投影设备
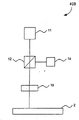
图1示意性描述了根据本发明一个实施例的光刻投影设备100。设备100至少包括辐射系统102、单独可控制元件阵列104、载物台106(例如衬底平台)、以及投影系统(“透镜”)108。
辐射系统102可以用于提供辐射(例如UV辐射)束110,在这里的实施例中该辐射系统还包括辐射源112。
单独可控制元件阵列104(例如可编程反射镜阵列)可以把图形应用到射束110。通常,单独可控制元件阵列104相对于投影系统108的位置可以是固定的。然而,在可替代的配置中,单独可控制元件阵列104可以被连接到定位装置(未示出)以精确确定其相对于投影系统108的位置。正如这里所描述的,单独可控制元件104属于反射类型(例如,具有单独可控制元件的反射阵列)。
载物台106可设有用于支撑衬底114(例如涂敷了抗蚀剂的硅晶片或玻璃衬底)的衬底支架(未明确示出),载物台106可以连接到定位装置116以精确定位衬底114相对于投影系统108的位置。
投影系统108(例如石英和/或CaF2透镜系统或包括由这些材料制成的透镜元件的反射折射系统或者反射镜系统)可以用于把从分束器118接收的图形化射束投影到衬底114的目标部分120(例如一个或多个管芯)。投影系统108可以把单独可控制元件阵列104的图像投影到衬底114上。或者,投影系统108可以投影二次光源的图像,单独可控制元件阵列104的元件作为遮光器。投影系统108还可能包括形成二次光源并把微光斑投影到衬底114上的微透镜阵列(MLA)。
辐射源112(例如准分子激光器)可以产生辐射束122。直接地或者穿过例如诸如扩束器的调节装置126后,辐射束122被馈入照明系统(照明器)124。照明器124可能包括用于设定射束122强度分布的外部和/或内部径向范围(通常分别称为σ-外部及σ-内部)的调整装置128。此外,照明器124通常包括各种其它元件,例如积分器130与聚光器132。按照这种方式,照射到单独可控制元件阵列104上的射束110的截面具有所需的均匀性和强度分布。
应该注意,对于图1,辐射源112可以在光刻投影设备100的外壳内(例如,当辐射源112是汞灯时经常如此)。在可替代的实施例中,辐射源112也可能与光刻投影设备100距离甚远。在这种情况下,辐射束122将被引导入设备100中(例如借助合适的导向反射镜)。当辐射源112为准分子激光器时,实际情况通常为后一种情形。应当理解,这两种情况都落在本发明的范围内。
被使用分束器118引导后,投影束110随后与单独可控制元件阵列104交叉。被单独可控制元件阵列104反射后,射束110穿过投影系统108,投影系统108把射束110聚焦到衬底114的目标部分120上。
借助于定位装置116(与可选择的干涉测量装置134,该装置134位于底座136上并通过分束器140接收干涉束138),可以精确移动衬底平台106,从而在射束110的路径内定位不同的目标部分120。使用时,可以使用单独可控制元件阵列104的定位装置,在例如一个扫描期间,精确地校准单独可控制元件阵列104相对于射束110的路径的位置。通常,可以借助未在图1中明确示出的长冲程模块(粗略定位)及短冲程模块(精细定位),实现载物台106的移动。可以使用类似系统定位单独可控制元件阵列104。应当理解到,载物台106和/或单独可控制元件阵列104位置固定时,也可以选择/另外使投影束110可移动,以提供所需要的相对移动。
在本实施例的一个备选配置中,衬底平台106被固定,而衬底114可以在衬底平台106上移动。采用这种配置时,衬底平台106在平坦的最上表面上设有许多开口,通过这些开口注入气体以提供可支持衬底114的气垫。该配置传统上称为气体支撑(air bearing)配置。通过使用一个或多个致动器(未示出),可以在衬底平台106上移动衬底114,所述致动器可以精确定位衬底114相对于投影束110路径的位置。或者,可以通过选择性地开启或停止通过开口的气路,在衬底平台106上移动衬底114。
尽管这里把根据本发明的光刻设备100描述为用于曝光衬底上的抗蚀剂,应当了解到,本发明不限于这个用途,设备100可以用于无抗蚀剂光刻中投影图形化射束110。
所描述的设备100可以用于四种优选模式:
1.步进模式:单独可控制元件阵列104上的完整图形在一次扫描(即单次“闪光”)中被投影到目标部分120上。随后沿x与/或y方向把衬底平台106移动到不同位置,使图形化射束110辐照不同的目标部分120。
2.扫描模式:基本上与步进模式相同,不同之处在于,不是在单次“闪光”内曝光指定的目标部分120。相反地,单独可控制元件阵列104可以以速度v沿特定方向(所谓“扫描方向”,例如y方向)移动,使得图形化射束110扫描过单独可控制元件阵列104。同时,沿相同或相反的方向以速度V=Mv同时移动衬底平台106,其中M为投影系统108的放大倍率。按照这种方式,可以曝光相对大的目标部分120而无需降低分辨率。
3.脉冲模式:单独可控制元件阵列104基本上保持静止,使用脉冲辐射系统102把整个图像投影到衬底114的目标部分120。衬底平台106以基本上恒定的速度移动,使得图形化射束110扫过衬底106的一行。在辐射系统102的各个脉冲之间,根据需要更新单独可控制元件阵列104上的图形,并对脉冲计时,使得在衬底114的所需位置上的连续目标部分120被曝光。因此,图形束110可以扫过衬底114以把完整图像曝光在衬底114的一个条上。重复该过程直到整个衬底114被逐行曝光。
4.连续扫描模式:基本上与脉冲模式相同,不同之处在于,连续扫描模式使用基本上恒定的辐射系统102,以及在投影束110扫过并曝光衬底114时更新单独可控制元件阵列104上的图形。
可以采用上述模式的组合与/或变形,或者可以采用与上述模式完全不同的模式。
示例性扫描和探测系统
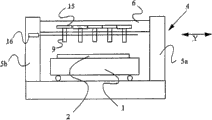
图2阐述了根据本发明一个实施例的扫描光刻设备的俯视图。图3阐述了沿箭头A观察的图2的设备的侧视图。这两个图用于表示基于扫描的工作模式。
在图2中,光刻设备被设置成沿一个方向、“x”方向扫描衬底2表面上的二维图形。该设备包含其上安装了衬底2的衬底平台1。使用驱动装置(未在图2中示出)可使衬底平台1沿扫描方向即x方向,以及y(和z)方向移动,该驱动装置在控制系统3的控制下工作。
在衬底2和衬底平台1上安装了小车架(trolley frame)4,该框架相对于衬底平台1是固定的。如图3所示,框架4包含支撑腿5a、5b以及台架6。台架6被支撑在支撑腿5a和5b上并跨过衬底平台1上方的空间。台架6支撑一组投影系统7(图2中示出了11个这种系统),每个投影系统在上文中结合图1得到描述。框架4扫过衬底2时,投影系统7被向着台架6的后沿定位,且投影系统7被设置成使得结合所产生的图形束而提供在y方向上对衬底2的完全覆盖。
在一个示例中,可以单独地控制每个投影系统7,从而改变图形化的光线照射衬底2的位置,并改变该射束的形状。如前所述,通常是通过平移作用于形成图形化装置的单独可控制元件阵列104的数字图形而实现这一点。由控制系统3产生施加到投影系统7的数字信号。
一组对准标记探测器9被向着台架6的前沿定位。应该理解,尽管图2和3阐述了5个这种探测器,该数目能够变化。每个探测器9被设置成探测对准标记10在衬底2表面上的位置。此外,每个探测器9相对于小车架4的位置探测哪个对准标记10穿过探测器9的视场,从而确定投影系统7的位置。
图4示意性阐述了根据本发明一个实施例的对准标记探测器409。探测器409为探测器9的一个示例配置。每个对准标记探测器409包含辐射源11,该辐射源工作于不会导致衬底2表面上的光致抗蚀剂曝光的波长。例如,辐射源11可产生红光,该光线相对于提供投影系统7所使用的曝光束(例如350至450nm)的光线被移动。该辐射通过分束器12,使用投影光学元件13被投影到衬底2的表面上。提供辐射传感器14以探测衬底2表面反射的光线。通常,由衬底2上光致抗蚀剂的被曝光及显影区域提供对准标记10(未在图4中示出),该对准标记导致出现高水平的反射。传感器14通过寻找从低水平反射到高水平反射并回到低水平的变化而探测对准标记10。传感器14向控制系统3提供输出信号(即该控制系统被设置成确定探测到的对准标记10相对于小车架4的位置)以及该位置和所需位置的任何偏差。
应该理解,可以使用其它探测器配置,包括在探测器9之间共享诸如辐射源的元件的探测器配置。
再次参考图3,在该示例中每个对准标记探测器9安装在线性驱动机械装置15上,该驱动机械装置包含线性电机。驱动机械装置15可沿y方向驱动探测器9在台架6上移动,并可移动一定范围。通常,这允许每个探测器9在各个探测器9之间的间隔上移动一半的距离,使得组合的探测器9可提供沿y方向对衬底2的完整覆盖。
每个驱动机械装置15被耦合到控制探测器9的位置的控制系统3。在该示例中,控制系统3从一组激光干涉仪系统16接收探测器位置信息。对于每个对准标记探测器9,干涉仪系统16包含固定到探测器9的反射镜以及固定到框架4的激光器和传感器装置。当移动探测器9时,控制系统3监测各个传感器的输出,以便计算干涉条纹的数目并确定探测器9的位置。出于解释清楚的考虑,只在图2和3中示出了一个干涉仪系统16,当然可以理解可为每个探测器9提供一个这种系统。
在另一个示例中,控制系统3接收来自操作人员输入的位置信息。
示例衬底
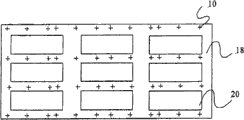
图5和6分别阐述了根据本发明的各种实施例,具有不同面板布局的衬底17和18的俯视图。衬底17、18具有相同的总体尺寸,但被设计成容纳不同的平板显示器尺寸。图5的衬底17被设计成容纳尺寸相同的4个面板19,而图6的衬底18被设计成容纳尺寸相同的9个面板20。每个面板上的对准标记被排列成适于该面板布局并最大化曝光期间衬底17、18被对准的精度。
示例操作
参考图2、3和5,准备曝光时将衬底17载入到衬底平台1上。实现该过程的精度通常为几毫米。在一个示例中,操作人员将衬底17的特性编程到控制系统3内,例如对准标记10的行数以及这些行(沿y方向)的位置。在另一个示例中,操作人员输入衬底类型代码,其中每种衬底类型的对准标记数据已经被预先编程到控制系统3中。在任一示例中,该操作导致适当数目的对准标记探测器9被激活,这种情况下为3个,并利用相应的线性驱动机械装置15将这些探测器移动到各行对准标记10上方的适当位置。在一个示例中,探测器9的视场足以将衬底平台1上衬底17上的定位误差调节到大约几毫米之内。或者,可执行特定的扫描程序以将每个探测器9的中心定位到相应的对准标记行上。
在本示例中,在定位探测器9期间,使用激光干涉仪系统16可精确记录其位置。最终位置信息被馈至控制系统3。通常,控制系统3在扫描前使用该信息沿y方向平移衬底平台1,从而准确地将投影系统和衬底对准。探测器9的视场足以容纳衬底17的这种轻微平移。随后开始曝光,沿x方向在小车架4下扫描衬底17。当每个探测器9探测到对准标记10经过时,位置信息被馈至控制系统3。前面已经描述,控制系统3根据接收到的对准标记信息数据,通过调整投影系统的光学元件、调整应用于单独可控制元件阵列的数字图形、调整衬底平台位置、或者这些调整的任意组合而正确地对准投影系统7和衬底17。
参考图2、3和6,操作人员输入的数据使得台架6上的4个探测器9被激励并移动到正确位置。面板20的配置和数目有利于使用衬底18上的4行对准标记10,使用这4行对准标记通常会提高曝光过程中的对准精确度。
图7为示出了根据本发明一个实施例的操作方法700的流程图。在步骤702中,衬底被置于衬底平台上。在步骤704中,选择适当数目的对准标记探测器并将其移动到使用中的位置。在步骤706中,执行扫描曝光。
结论
上面已经描述了本发明的各种实施例,应该理解到,仅仅是以例子的方式示出这些实施例,这些实施例并非用于限制本发明。对本领域技术人员而言,在不离开本发明的精神和范围下可以进行各种形式或细节上的变化。因此,本发明的广度和范围不受任何前述示例实施例限制,而应该只由所附权利要求书及其等效表述所限定。
Claims (3)
1.一种光刻设备,包括:
框架;
支撑衬底的衬底平台,该衬底在其表面上设有对准标记;
驱动装置,所述驱动装置沿第一方向移动衬底平台;以及
多个对准标记探测器,所述多个对准标记探测器耦合到该框架并能够沿与第一方向垂直的第二方向移动;
多个驱动机械装置,每个驱动机械装置分别与多个对准标记探测器中的一个相关联,每个驱动机械装置沿第二方向移动对应的对准标记探测器;以及
控制系统,所述控制系统根据包括多行对准标记的衬底的特性以及多行对准标记沿第二方向的位置,确定多个对准标记探测器中将被激活的对准标记探测器的适当数量,并且将确定将被激活的对准标记探测器移动到第二方向上的适当位置处,
其中,多个驱动机械装置的每一个能够在一定范围上驱动相关联的对准标记探测器,使得组合的对准标记探测器提供沿第二方向对衬底的完整覆盖。
2.根据权利要求1所述的设备,还包括:
多个位置传感器,每个位置传感器分别与多个对准标记探测器中的一个相关联,每个位置传感器确定对应的对准标记探测器相对于该框架的位置。
3.一种用于具有多个对准标记探测器的光刻设备的对准方法,包括步骤:
提供衬底,所述衬底在其表面上具有多行对准标记,每个对准标记沿第一方向布置;
根据包括多行对准标记的衬底的特性以及多行对准标记沿第二方向的位置,确定多个对准标记探测器中将被激活的对准标记探测器的适当数量以及它们在垂直于第一方向的第二方向上的适当位置;以及
通过多个对应的驱动机械装置将确定将被激活的对准标记探测器移动到第二方向上的被确定位置处,
其中,多个驱动机械装置的每一个能够在一定范围上驱动相关联的对准标记探测器,使得组合的对准标记探测器提供沿第二方向对衬底的完整覆盖。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/975183 | 2004-10-28 | ||
| US10/975,183 US7388663B2 (en) | 2004-10-28 | 2004-10-28 | Optical position assessment apparatus and method |
| US10/975,183 | 2004-10-28 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2005101185152A Division CN1766740B (zh) | 2004-10-28 | 2005-10-27 | 光学位置确定设备及方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101852992A CN101852992A (zh) | 2010-10-06 |
| CN101852992B true CN101852992B (zh) | 2013-01-09 |
Family
ID=35636881
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010101134518A Active CN101852992B (zh) | 2004-10-28 | 2005-10-27 | 光学位置确定设备及方法 |
| CN2005101185152A Active CN1766740B (zh) | 2004-10-28 | 2005-10-27 | 光学位置确定设备及方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2005101185152A Active CN1766740B (zh) | 2004-10-28 | 2005-10-27 | 光学位置确定设备及方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7388663B2 (zh) |
| EP (1) | EP1653288B1 (zh) |
| JP (4) | JP4310302B2 (zh) |
| KR (1) | KR100806280B1 (zh) |
| CN (2) | CN101852992B (zh) |
| SG (3) | SG121953A1 (zh) |
| TW (2) | TWI326015B (zh) |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7388663B2 (en) * | 2004-10-28 | 2008-06-17 | Asml Netherlands B.V. | Optical position assessment apparatus and method |
| US8259286B2 (en) * | 2004-12-21 | 2012-09-04 | Carnegie Mellon University | Lithography and associated methods, devices, and systems |
| US7459247B2 (en) * | 2004-12-27 | 2008-12-02 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| JP4533777B2 (ja) * | 2005-02-28 | 2010-09-01 | 富士フイルム株式会社 | シート体位置検出方法及び装置並びにそれを用いた描画装置 |
| US8411271B2 (en) * | 2005-12-28 | 2013-04-02 | Nikon Corporation | Pattern forming method, pattern forming apparatus, and device manufacturing method |
| EP1983555B1 (en) * | 2006-01-19 | 2014-05-28 | Nikon Corporation | Movable body drive method, movable body drive system, pattern formation method, pattern forming apparatus, exposure method, exposure apparatus and device manufacturing method |
| EP3279739A1 (en) | 2006-02-21 | 2018-02-07 | Nikon Corporation | Exposure apparatus, exposure method, and device manufacturing method |
| CN101385121B (zh) | 2006-02-21 | 2011-04-20 | 株式会社尼康 | 图案形成装置及图案形成方法、移动体驱动系统及移动体驱动方法、曝光装置及曝光方法、以及组件制造方法 |
| SG178791A1 (en) | 2006-02-21 | 2012-03-29 | Nikon Corp | Pattern forming apparatus, mark detecting apparatus, exposure apparatus, pattern forming method, exposure method and device manufacturing method |
| US7525671B2 (en) * | 2006-04-11 | 2009-04-28 | Micronic Laser Systems Ab | Registration method and apparatus therefor |
| TWI610149B (zh) * | 2006-08-31 | 2018-01-01 | Nikon Corp | 移動體驅動系統及移動體驅動方法、圖案形成裝置及方法、曝光裝置及方法、元件製造方法、以及決定方法 |
| CN101410945B (zh) * | 2006-08-31 | 2013-03-27 | 株式会社尼康 | 与移动体驱动、图案形成、曝光相关的方法和装置 |
| KR101585370B1 (ko) | 2006-08-31 | 2016-01-14 | 가부시키가이샤 니콘 | 이동체 구동 방법 및 이동체 구동 시스템, 패턴 형성 방법 및 장치, 노광 방법 및 장치, 그리고 디바이스 제조 방법 |
| EP2071613B1 (en) | 2006-09-01 | 2019-01-23 | Nikon Corporation | Exposure method and apparatus |
| KR101477471B1 (ko) | 2006-09-01 | 2014-12-29 | 가부시키가이샤 니콘 | 이동체 구동 방법 및 이동체 구동 시스템, 패턴 형성 방법 및 장치, 노광 방법 및 장치, 그리고 디바이스 제조 방법 |
| DE102006059818B4 (de) * | 2006-12-11 | 2017-09-14 | Kleo Ag | Belichtungsanlage |
| US20090042139A1 (en) * | 2007-04-10 | 2009-02-12 | Nikon Corporation | Exposure method and electronic device manufacturing method |
| US20090042115A1 (en) * | 2007-04-10 | 2009-02-12 | Nikon Corporation | Exposure apparatus, exposure method, and electronic device manufacturing method |
| US20080270970A1 (en) * | 2007-04-27 | 2008-10-30 | Nikon Corporation | Method for processing pattern data and method for manufacturing electronic device |
| US20110080570A1 (en) * | 2008-06-09 | 2011-04-07 | Hideaki Sunohara | Exposure apparatus and exposure method |
| US8432548B2 (en) * | 2008-11-04 | 2013-04-30 | Molecular Imprints, Inc. | Alignment for edge field nano-imprinting |
| JP5381029B2 (ja) * | 2008-11-10 | 2014-01-08 | ウシオ電機株式会社 | 露光装置 |
| DE102009032210B4 (de) | 2009-07-03 | 2011-06-09 | Kleo Ag | Bearbeitungsanlage |
| CN102725680B (zh) * | 2010-01-21 | 2015-02-11 | 夏普株式会社 | 基板、针对基板的曝光方法、光取向处理方法 |
| NL2005975A (en) | 2010-03-03 | 2011-09-06 | Asml Netherlands Bv | Imprint lithography. |
| WO2012008944A1 (en) | 2010-07-12 | 2012-01-19 | Otis Elevator Company | Speed and position detection system |
| NL2007155A (en) | 2010-08-25 | 2012-02-28 | Asml Netherlands Bv | Stage apparatus, lithographic apparatus and method of positioning an object table. |
| EP2691811B1 (en) | 2011-03-29 | 2018-01-31 | ASML Netherlands B.V. | Measurement of the position of a radiation beam spot in lithography |
| KR101326107B1 (ko) * | 2011-12-20 | 2013-11-06 | 삼성디스플레이 주식회사 | 레이저 가공장치 및 그 제어방법 |
| CN102654387B (zh) * | 2012-05-25 | 2014-07-02 | 南京理工大学 | 一种基于空间曲面约束的工业机器人在线标定装置及其实现方法 |
| CN102706277B (zh) * | 2012-05-25 | 2014-11-05 | 南京理工大学 | 一种基于全方位点约束的工业机器人在线零位标定装置及方法 |
| CN104102092A (zh) * | 2013-04-11 | 2014-10-15 | 常熟晶悦半导体设备有限公司 | 一种具有自动对准系统的四曝光头光学曝光机 |
| JP5605770B2 (ja) * | 2013-05-20 | 2014-10-15 | 株式会社ニコン | 表示素子の製造方法、及び表示素子の製造装置 |
| JP6228420B2 (ja) * | 2013-10-08 | 2017-11-08 | キヤノン株式会社 | 検出装置、リソグラフィ装置、および物品の製造方法 |
| KR102419494B1 (ko) * | 2014-09-29 | 2022-07-12 | 삼성디스플레이 주식회사 | 마스크리스 노광 장치, 마스크리스 노광 방법 및 이에 의해 제조되는 표시 기판 |
| KR102255033B1 (ko) * | 2015-01-13 | 2021-05-25 | 삼성디스플레이 주식회사 | 마스크리스 노광 장치 및 이를 이용한 마스크리스 노광 방법 |
| TWI753865B (zh) * | 2015-11-03 | 2022-02-01 | 以色列商奧寶科技有限公司 | 用於高解析度電子圖案化的無針跡直接成像 |
| US10707107B2 (en) | 2015-12-16 | 2020-07-07 | Kla-Tencor Corporation | Adaptive alignment methods and systems |
| KR102556130B1 (ko) * | 2016-09-27 | 2023-07-14 | 가부시키가이샤 니콘 | 결정 방법 및 장치, 프로그램, 정보 기록 매체, 노광 장치, 레이아웃 정보 제공 방법, 레이아웃 방법, 마크 검출 방법, 노광 방법, 그리고 디바이스 제조 방법 |
| CN108121162B (zh) * | 2016-11-29 | 2019-09-17 | 上海微电子装备(集团)股份有限公司 | 一种投影曝光装置及曝光方法 |
| EP3339959A1 (en) | 2016-12-23 | 2018-06-27 | ASML Netherlands B.V. | Method of determining a position of a feature |
| JP6447845B2 (ja) * | 2017-04-18 | 2019-01-09 | 株式会社ニコン | 露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び露光方法 |
| US11152238B2 (en) * | 2017-11-30 | 2021-10-19 | Taiwan Semiconductor Manufacturing Co., Ltd. | Semiconductor processing stage profiler jig |
| JP7045890B2 (ja) * | 2018-03-20 | 2022-04-01 | 株式会社Screenホールディングス | パターン描画装置およびパターン描画方法 |
| CN110296666B (zh) * | 2018-03-23 | 2021-04-20 | 泓邦科技有限公司 | 三维量测器件 |
| JP2019045875A (ja) * | 2018-12-07 | 2019-03-22 | 株式会社ニコン | 露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び露光方法 |
| CN112445088A (zh) * | 2020-12-04 | 2021-03-05 | 百及纳米科技(上海)有限公司 | 一种步进式光刻机、其工作方法及图形对准装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5220176A (en) * | 1991-09-13 | 1993-06-15 | Nikon Corporation | Apparatus and method for detecting alignment marks having alignment optical systems' driving means |
| EP0715214A1 (en) * | 1994-11-29 | 1996-06-05 | Ushiodenki Kabushiki Kaisha | Process for positioning a mask relative to a workpiece and device for carrying out the process |
| EP0786702A2 (en) * | 1996-01-11 | 1997-07-30 | Ushiodenki Kabushiki Kaisha | Process for pattern searching and a device for positioning of a mask to a workpiece |
| CN1333554A (zh) * | 2001-07-26 | 2002-01-30 | 清华大学 | 阵列式光探针扫描集成电路光刻系统中的对准方法及其装置 |
| CN1459671A (zh) * | 2002-05-22 | 2003-12-03 | 尼康株式会社 | 曝光方法、曝光装置及元件制造方法 |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH079877B2 (ja) * | 1986-07-11 | 1995-02-01 | 株式会社ニコン | アライメント装置 |
| US5523193A (en) * | 1988-05-31 | 1996-06-04 | Texas Instruments Incorporated | Method and apparatus for patterning and imaging member |
| GB8827952D0 (en) * | 1988-11-30 | 1989-01-05 | Screen Form Inc | Display device |
| JPH02242259A (ja) * | 1989-03-15 | 1990-09-26 | Toppan Printing Co Ltd | 基板露光における見当合わせ方法及びその装置 |
| DE59105735D1 (de) * | 1990-05-02 | 1995-07-20 | Fraunhofer Ges Forschung | Belichtungsvorrichtung. |
| JP3031993B2 (ja) * | 1990-11-05 | 2000-04-10 | 株式会社東芝 | X線露光装置 |
| US5229872A (en) * | 1992-01-21 | 1993-07-20 | Hughes Aircraft Company | Exposure device including an electrically aligned electronic mask for micropatterning |
| US6219015B1 (en) | 1992-04-28 | 2001-04-17 | The Board Of Directors Of The Leland Stanford, Junior University | Method and apparatus for using an array of grating light valves to produce multicolor optical images |
| JP3224041B2 (ja) | 1992-07-29 | 2001-10-29 | 株式会社ニコン | 露光方法及び装置 |
| US5496407A (en) * | 1993-04-19 | 1996-03-05 | Mcaleavey; Michael E. | System and method for monitoring and controlling thickness |
| US5729331A (en) | 1993-06-30 | 1998-03-17 | Nikon Corporation | Exposure apparatus, optical projection apparatus and a method for adjusting the optical projection apparatus |
| US5614988A (en) * | 1993-12-06 | 1997-03-25 | Nikon Corporation | Projection exposure apparatus and method with a plurality of projection optical units |
| JP3339149B2 (ja) | 1993-12-08 | 2002-10-28 | 株式会社ニコン | 走査型露光装置ならびに露光方法 |
| KR100377887B1 (ko) * | 1994-02-10 | 2003-06-18 | 가부시키가이샤 니콘 | 정렬방법 |
| US5492601A (en) * | 1994-07-29 | 1996-02-20 | Wangner Systems Corporation | Laser apparatus and method for monitoring the de-watering of stock on papermaking machines |
| US5617211A (en) * | 1994-08-16 | 1997-04-01 | Nikon Corporation | Exposure apparatus |
| US5546808A (en) * | 1994-09-06 | 1996-08-20 | Harris Instrument Corporation | Apparatus and method for binocular measurement system |
| JP3050498B2 (ja) * | 1994-10-17 | 2000-06-12 | 日立電子エンジニアリング株式会社 | 位置ずれ量測定光学系の調整方法および位置ずれ量測定装置 |
| KR100399813B1 (ko) * | 1994-12-14 | 2004-06-09 | 가부시키가이샤 니콘 | 노광장치 |
| US5677703A (en) | 1995-01-06 | 1997-10-14 | Texas Instruments Incorporated | Data loading circuit for digital micro-mirror device |
| US5530482A (en) | 1995-03-21 | 1996-06-25 | Texas Instruments Incorporated | Pixel data processing for spatial light modulator having staggered pixels |
| JP2994232B2 (ja) | 1995-07-28 | 1999-12-27 | ウシオ電機株式会社 | マスクとマスクまたはマスクとワークの位置合わせ方法および装置 |
| AU1975197A (en) | 1996-02-28 | 1997-10-01 | Kenneth C. Johnson | Microlens scanner for microlithography and wide-field confocal microscopy |
| AU2048097A (en) | 1997-01-29 | 1998-08-18 | Micronic Laser Systems Ab | Method and apparatus for the production of a structure by focused laser radiation on a photosensitively coated substrate |
| US6177980B1 (en) | 1997-02-20 | 2001-01-23 | Kenneth C. Johnson | High-throughput, maskless lithography system |
| SE509062C2 (sv) | 1997-02-28 | 1998-11-30 | Micronic Laser Systems Ab | Dataomvandlingsmetod för en laserskrivare med flera strålar för mycket komplexa mikrokolitografiska mönster |
| US5982553A (en) | 1997-03-20 | 1999-11-09 | Silicon Light Machines | Display device incorporating one-dimensional grating light-valve array |
| JP4029130B2 (ja) * | 1997-06-03 | 2008-01-09 | 株式会社ニコン | 露光装置及び露光方法 |
| US5956134A (en) * | 1997-07-11 | 1999-09-21 | Semiconductor Technologies & Instruments, Inc. | Inspection system and method for leads of semiconductor devices |
| KR100521704B1 (ko) * | 1997-09-19 | 2005-10-14 | 가부시키가이샤 니콘 | 스테이지장치, 주사형 노광장치 및 방법, 그리고 이것으로제조된 디바이스 |
| SE9800665D0 (sv) | 1998-03-02 | 1998-03-02 | Micronic Laser Systems Ab | Improved method for projection printing using a micromirror SLM |
| US6261728B1 (en) * | 1998-10-19 | 2001-07-17 | Vanguard International Semiconductor Corporation | Mask image scanning exposure method |
| JP2001033976A (ja) * | 1999-07-21 | 2001-02-09 | Nikon Corp | 位置合わせ装置、位置合わせ方法および露光装置 |
| JP2001118773A (ja) * | 1999-10-18 | 2001-04-27 | Nikon Corp | ステージ装置及び露光装置 |
| US6355994B1 (en) * | 1999-11-05 | 2002-03-12 | Multibeam Systems, Inc. | Precision stage |
| US6811953B2 (en) * | 2000-05-22 | 2004-11-02 | Nikon Corporation | Exposure apparatus, method for manufacturing therof, method for exposing and method for manufacturing microdevice |
| JP3563384B2 (ja) * | 2001-11-08 | 2004-09-08 | 大日本スクリーン製造株式会社 | 画像記録装置 |
| JP2004012903A (ja) * | 2002-06-07 | 2004-01-15 | Fuji Photo Film Co Ltd | 露光装置 |
| EP1372036A1 (en) * | 2002-06-12 | 2003-12-17 | ASML Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US6870554B2 (en) * | 2003-01-07 | 2005-03-22 | Anvik Corporation | Maskless lithography with multiplexed spatial light modulators |
| SE0300453D0 (sv) * | 2003-02-20 | 2003-02-20 | Micronic Laser Systems Ab | Pattern generation method |
| JP2004272167A (ja) * | 2003-03-12 | 2004-09-30 | Dainippon Printing Co Ltd | パターン形成装置、パターン形成方法、基材 |
| US6950188B2 (en) * | 2003-04-23 | 2005-09-27 | International Business Machines Corporation | Wafer alignment system using parallel imaging detection |
| EP1482373A1 (en) * | 2003-05-30 | 2004-12-01 | ASML Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| JP3860582B2 (ja) * | 2003-07-31 | 2006-12-20 | 株式会社東芝 | 半導体装置の製造方法 |
| US7388663B2 (en) * | 2004-10-28 | 2008-06-17 | Asml Netherlands B.V. | Optical position assessment apparatus and method |
-
2004
- 2004-10-28 US US10/975,183 patent/US7388663B2/en active Active
-
2005
- 2005-09-20 EP EP05255793.1A patent/EP1653288B1/en active Active
- 2005-09-28 SG SG200506271A patent/SG121953A1/en unknown
- 2005-09-28 SG SG2011040466A patent/SG172672A1/en unknown
- 2005-09-28 SG SG200807524-4A patent/SG147421A1/en unknown
- 2005-10-17 TW TW094136097A patent/TWI326015B/zh active
- 2005-10-17 TW TW098102116A patent/TW200921304A/zh unknown
- 2005-10-27 CN CN2010101134518A patent/CN101852992B/zh active Active
- 2005-10-27 JP JP2005312849A patent/JP4310302B2/ja active Active
- 2005-10-27 CN CN2005101185152A patent/CN1766740B/zh active Active
- 2005-10-28 KR KR1020050102372A patent/KR100806280B1/ko active IP Right Grant
-
2008
- 2008-09-16 JP JP2008236347A patent/JP4648442B2/ja active Active
-
2010
- 2010-08-19 JP JP2010183894A patent/JP5238771B2/ja active Active
-
2012
- 2012-11-20 JP JP2012253918A patent/JP5554819B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5220176A (en) * | 1991-09-13 | 1993-06-15 | Nikon Corporation | Apparatus and method for detecting alignment marks having alignment optical systems' driving means |
| EP0715214A1 (en) * | 1994-11-29 | 1996-06-05 | Ushiodenki Kabushiki Kaisha | Process for positioning a mask relative to a workpiece and device for carrying out the process |
| EP0786702A2 (en) * | 1996-01-11 | 1997-07-30 | Ushiodenki Kabushiki Kaisha | Process for pattern searching and a device for positioning of a mask to a workpiece |
| CN1333554A (zh) * | 2001-07-26 | 2002-01-30 | 清华大学 | 阵列式光探针扫描集成电路光刻系统中的对准方法及其装置 |
| CN1459671A (zh) * | 2002-05-22 | 2003-12-03 | 尼康株式会社 | 曝光方法、曝光装置及元件制造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006128693A (ja) | 2006-05-18 |
| TW200627096A (en) | 2006-08-01 |
| JP4648442B2 (ja) | 2011-03-09 |
| JP5238771B2 (ja) | 2013-07-17 |
| JP4310302B2 (ja) | 2009-08-05 |
| KR100806280B1 (ko) | 2008-02-22 |
| JP2013047850A (ja) | 2013-03-07 |
| JP2010268005A (ja) | 2010-11-25 |
| JP5554819B2 (ja) | 2014-07-23 |
| TWI326015B (en) | 2010-06-11 |
| SG121953A1 (en) | 2006-05-26 |
| SG147421A1 (en) | 2008-11-28 |
| TW200921304A (en) | 2009-05-16 |
| SG172672A1 (en) | 2011-07-28 |
| US20060092419A1 (en) | 2006-05-04 |
| EP1653288B1 (en) | 2019-05-15 |
| JP2009010420A (ja) | 2009-01-15 |
| US7388663B2 (en) | 2008-06-17 |
| EP1653288A1 (en) | 2006-05-03 |
| CN1766740A (zh) | 2006-05-03 |
| CN1766740B (zh) | 2010-05-05 |
| KR20060052321A (ko) | 2006-05-19 |
| CN101852992A (zh) | 2010-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101852992B (zh) | 光学位置确定设备及方法 | |
| CN1684002B (zh) | 平版印刷装置和器件制造方法 | |
| KR100767090B1 (ko) | 리소그래피장치 및 디바이스 제조방법 | |
| US8502954B2 (en) | Lithographic apparatus and device manufacturing method | |
| US7477403B2 (en) | Optical position assessment apparatus and method | |
| JP2010068002A (ja) | リソグラフィ装置及びデバイス製造方法 | |
| US7239393B2 (en) | Calibration method for a lithographic apparatus and device manufacturing method | |
| CN101105641A (zh) | 光学变焦组件中光学元件的离轴平移校正 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |