CN1079056C - 双动力型汽车的控制装置 - Google Patents
双动力型汽车的控制装置 Download PDFInfo
- Publication number
- CN1079056C CN1079056C CN97113243A CN97113243A CN1079056C CN 1079056 C CN1079056 C CN 1079056C CN 97113243 A CN97113243 A CN 97113243A CN 97113243 A CN97113243 A CN 97113243A CN 1079056 C CN1079056 C CN 1079056C
- Authority
- CN
- China
- Prior art keywords
- traction motor
- output
- engine
- speed
- gear ratio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/30—Control strategies involving selection of transmission gear ratio
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/543—Transmission for changing ratio the transmission being a continuously variable transmission
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2054—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed by controlling transmissions or clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/15—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with additional electric power supply
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/18—Controlling the braking effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/445—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/068—Engine exhaust temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2530/00—Input parameters relating to vehicle conditions or values, not covered by groups B60W2510/00 or B60W2520/00
- B60W2530/16—Driving resistance
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
- F16H61/0213—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal characterised by the method for generating shift signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/21—Providing engine brake control
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/915—Specific drive or transmission adapted for hev
- Y10S903/917—Specific drive or transmission adapted for hev with transmission for changing gear ratio
- Y10S903/918—Continuously variable
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/945—Characterized by control of gearing, e.g. control of transmission ratio
Abstract
一种双动力型汽车的控制装置。汽车包括由电能驱动汽车驱动轴并具有把驱动轴的动能转换成电能的再生功能的牵引电动机,设置在汽车驱动轮和汽车内燃机及牵引电动机之间的传动装置,向牵引电动机提供电能并储存牵引电动机输出的电能的蓄电池。牵引电动机的理想输出根据汽车的减速状况计算,牵引电动机提供最大再生输出的最佳转速根据计算的理想输出计算。控制传动装置的传动齿轮速比,使得牵引电动机的转速等于最佳转速。
Description
本发明涉及一种以内燃机和牵引电动机作为原动机的双动力型汽车的控制系统。
常规的以内燃机(以下简称引擎)和牵引电动机作为原动机的双动力型汽车已广为人知,控制这种双动力型汽车原动机的控制系统也已在日本专利公开公报NO.5-229351中提出。
这种被提出的控制系统依据汽车的行驶条件决定获得最大引擎效率的最佳转矩,同时探测引擎实际驱动汽车所产生的实际转矩。然后,控制系统从最佳转矩和实际转矩中确定或选择需要的转矩。当选取最佳转矩作为所需的转矩,而同时最佳转矩大于实际转矩时,就有再生能量(尤指电能)的正反馈电流产生。
当牵引电动机进行能量再生时,再生能量的量通常随着牵引电动机转速的增加而增加。另一方面,当电动机的转速即引擎的转速增加时,由于引擎刹车而损失的能量增加。另外,牵引电动机产生电能的能力有一个限度,因此,尽管电动机的转速增加,其再生的能量也超不过该限度。
常规的控制系统没有考虑到电动机的转速、引擎的刹车和电动机产生能量的限度之间的关系,因此注意力仍然停留在汽车动能作为电能有效收集的提高上。
本发明的一个目的在于提供一种用于有内燃机、牵引电动机以及安装在引擎、电动机与汽车驱动轮之间的传动装置的双动力型汽车的控制系统,该系统能够以一种适当的方式控制传动装置的传动齿轮速比,从而提高牵引电动机电能的再生率并因此达到在减速期间汽车动能收集的最大效率。
为达到上述目的,本发明提供了一种对双动力型汽车的控制系统,其中双动力型汽车包括驱动轮、内燃机引擎、由引擎驱动的驱动轴、用电能直接驱动驱动轴并具有将驱动轴的动能转换成电能的再生作用的牵引电动机、安装在汽车的驱动轮和引擎及牵引电动机之间的传动装置及向牵引电动机提供电能并储存牵引电动机输出的电能的电存储装置,控制系统包括:
理想输出的计算装置,根据汽车的减速状况计算牵引电动机的理想输出;
最佳转速的计算装置,根据由理想输出的计算装置计算的理想输出,计算牵引电动机提供最大再生输出的最佳转速;以及
传动齿轮速比控制装置,控制传动装置的传动齿轮速比,使牵引电动机的转速为最佳转速。
其结果是汽车减速期间产生的动能可以作为电能有效地收集起来。
最佳转速计算装置最好根据牵引电动机的再生输出限度计算最佳转速;
其结果是可避免牵引电动机的过热和传动齿轮速比的过度变化。
理想输出的计算装置最好包括引擎所需输出的计算装置,以根据含有引擎转速在内的引擎工作状况而计算出引擎所需的输出;行驶阻力计算装置,以根据汽车的行驶状况计算汽车的行驶阻力;最好还包括引擎额外输出计算装置,以根据引擎所需的输出和行驶阻力计算出引擎的额外输出;还包括理想输出的计算装置,以根据引擎的额外输出计算出牵引电动机的理想输出。
更好的是,最佳转速计算装置根据引擎的旋转速度,计算出牵引电动机的再生输出限度,并且根据牵引电动机的理想输出和再生输出限度计算牵引电动机的最佳旋转速度。
最好是设置再生输出限度在引擎的转速低于预定值的范围内与引擎的转速成比例增加,而在引擎的转速等于或大于预定值的范围内为固定值。
传动齿轮速比控制装置最好响应于引擎的转速和最佳转速的差别控制传动装置的传动齿轮速比,使得差别变为最小。
汽车最好包括一个加速踏板;含从动轴的传动装置;含根据加速踏板的加速量和汽车的行驶速度而计算传动装置基本传动齿轮速比的装置的传动齿轮速比控制装置,该传动齿轮速比控制装置根据引擎的转速和最佳转速、驱动轴的转速之间的差别以及由该装置算出的基本传动齿轮速比,计算出理想传动齿轮速比,并把传动齿轮速比调整到算出的理想传动齿轮速比。
控制系统最好包括剩余电荷计算装置,以计算电储存装置中的剩余电荷量;还包括电动机输出限定装置,以根据剩余电荷计算装置算出的剩余电荷量,限定牵引电动机的输出。
因此,可以根据剩余电荷量以一种适当的方式对电存储装置充电。
其优点在于传动装置是一种变速传动装置。
由此,可实现在汽车减速期间最有效地收集动能。
本发明的各种目的、特征及优点通过以下结合附图的详细描述将变得更加明确。
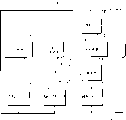
图1是根据本发明实施例双动力型汽车驱动系统及其控制系统的整体布局框图;
图2是内燃机及其控制系统的布局框图;
图3是牵引电动机及其控制系统的布局框图;
图4是传动装置及其控制系统的布局框图;
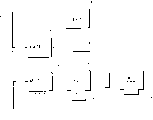
图5是执行助推/再生判断程序的流程图,在该程序中,根据蓄电池的剩余电荷量决定是对引擎进行牵引电动机的助推还是通过牵引电动机再生电能;
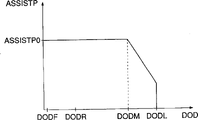
图6是用在图5程序中的ASSISTP图;
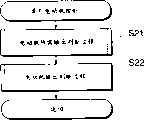
图7是执行牵引电动机总控制程序的流程图;
图8是执行所需电动机输出判定程序的流程图;
图9表示判定汽车行驶阻力的RUNRST表;
图10表示判定所需电动机输出的MOTORPOWER图;
图11A是执行电动机输出判定程序的流程图;
图11B是图11A流程的后续部分;
图12是执行减速再生程序的子程序流程图,该程序在图11B中的S65步骤执行;
图13是执行传动控制程序的流程图;
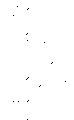
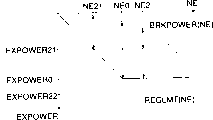
图14A是用于解释设置牵引电动机最佳旋转速度方式的曲线;
图14B也是用于解释设置牵引电动机最佳旋转速度方式的曲线;
图15是执行引擎总控制程序的流程图;
图16是执行引擎工作状况判定程序的子程序流程图,该程序在图15中的S132步骤执行。
本发明将参考表示其实施例的附图进行详细的描述。
首先参见图1,它为本发明实施例双动力型汽车的驱动装置及其控制装置的布局简图(在此省去了传感器、致动装置和其它相关的元件)。
如图所示,内燃机1(以下简称引擎)旋转地驱动驱动轴2,通过传动装置4传递转矩给驱动轮5以旋转地驱动驱动轮5。牵引电动机3安装在驱动轴2上,使得前者可直接驱动后者旋转。牵引电动机3不仅作为助推引擎1的原动机,而且作为一个发电机,对来自旋转驱动轴2的部分汽车动能转变成电能产生再生作用,并输出电能,通过电源驱动单元13(以下简称PDU)对蓄电池14充电。牵引电动机3由通过PDU13接收到的控制信号控制其操作。
控制系统包括控制引擎1的电子控制单元11(以下简称“ENGECU”),控制牵引电动机3的电子控制单元12(以下简称“MOTECU”),控制蓄电池14的电子控制单元15(以下简称“BATECU”)和控制传动装置4的电子控制单元16(以下简称“T/MECU)。这些ECU通过数据总线21相互连接并相互传递所探测参数的数据、关于标识的信息等。
图2是引擎1、ENGECU11和与之相关联的外围设备。连接到引擎柱状区域的是一个被装入节流阀103的吸管102。节流阀开口(θTH)传感器104与节流阀103连接,产生表示探测到的节流阀开口θTH的电信号并提供给ENGECU11。节流阀103是线驱动型(DBW),被连接到节流致动器105,使阀开口θTH受到电控制。节流致动器105由ENGECU发出的信号控制其操作。
燃料喷射阀106(仅示出其中一个)插在吸管102中,而吸管102位于引擎1和节流阀103之间并稍稍偏向其相应输入阀的上游,图中没有标出输入阀。燃料喷射阀106经过压力调节器与燃料泵连接,并与ENGECU11电连接,使阀门打开的周期和阀门打开的定时受发出的信号控制。图中燃料泵和压力调节器均未示出。
另一方面,吸管绝对压(PBA)传感器108设置成经过在紧挨节流阀103下游位置上的导管107与吸管102内部相连,向ENGECU11提供表示探测到的吸管102内绝对压(PEA)的电信号。
输入空气温度(TA)传感器109被插入位于导管107下游的吸管102内,向ENGECU11提供表示探测到的输入空气温度(TA)的电信号。可以由热敏电阻或类似物制作的引擎制冷剂温度(TW)传感器110被安置在引擎1的柱状区域,向ENGECU11提供表示探测到的引擎制冷剂温度TW的电信号。
引擎转速(NE)传感器111被布置成与引擎1的凸轮轴或曲轴对面的关系,凸轮轴和曲轴均未标出。每当曲轴旋转过180度,引擎转速(NE)传感器111在每个圆柱的预置曲柄角位置产生一个脉冲(以下称为“TDC信号脉冲”)。TDC信号脉冲提供给ENGECU11。
引擎1有分别为柱体提供的火花塞113,每个火花塞与ENGECU11连接,由电信号控制其点火定时。
三元催化净化器115安装在与引擎1的柱状区域连接的排气管114内,以净化有毒成份,如HC,CO和NOx。线性输出型空气-燃料比传感器(以下称为“LAF传感器”)117安装在位于三元催化净化器115上游的排气管114中。LAF传感器117向ENGECU11提供大致与排出气体中氧气浓度成正比的电信号。LAF传感器117能够在从稀少到富含的很宽范围内探测提供给引擎1的混合物中空气-燃料比。
三元催化净化器115有一个触媒温度(TCAT)传感器118,它将表示探测到的触媒温度TCAT的输出信号传递给ENGECU11。另外,探测行驶汽车行驶速度VCAR的汽车速度传感器119和探测由驾驶员发出的加速器踏板移动(以下称为“加速器开口”)θAP的加速器开口传感器120均与ENGECU11连接,并且表示探测到的汽车速度VCAR和探测到的加速器开口θAP的信号均提供给ENGECU11。
ENGECU11包括一个未标出的输入电路,该电路具有对从各个传感器输入的信号波形整形、将传感器输出信号的电压电平移到一个预定的电平以及把模拟输出传感器输出的模拟信号转换成数字信号等作用,ENGECU11还包括未标出的一个中央处理器(以下称作“CPU”),一个储存由CPU执行的各个执行程序及其计算结果等的存储单元,一个向燃料喷射阀106输出驱动信号的输出电路,和火花塞113等。其余的ECU的每个的构造基本上类似于ENGECU11。
图3是牵引电动机3、PDU13、蓄电池14、MOTECU12和BATECU15连接的详细图。
牵引电动机3有一个安置在其上的电动机转速传感器202,探测牵引电动机的转速,将探测到的表示电动机转速的输出信号提供给M0TECU12。在PDU13和牵引电动机3之间排成直线电连接的电流/电压传感器201探测提供给或由牵引电动机3产生的电流和电压。另外,PDU13有一个安置其上的温度传感器203,探测牵引电动机3的驱动电路(未示出)保护电阻的温度TD。这些传感器201、203向MOTECU12提供表示各个探测到的参数的信号。
在PDU13和蓄电池14之间排成直线电连接的电流/电压传感器204探测蓄电池14输出端的电压和流出或流进蓄电池14的电流,将表示探测到的电压和电流的输出信号提供给BATECU15。
图4是传动装置4和T/MECU16的连接图。传动装置4是变速传感装置,有安置于其上探测传动装置4驱动轴转速ND和从动轴转速NM的转速传感器301和302,它将表示探得参数的信号传递给T/MECU16。T/MECU16根据传感器301和302输出的信号计算传动齿轮速比GR。另外,传动装置4还有一个安置其上的传动致动器303,经过传动致动器303由来自T/MECU16的信号控制传动装置的操作。
图5是由BATECU15比如在一个预定的时间间隔内执行助推/再生判定过程的程序。
首先,在S1步骤计算累计放电值BATTDISCH和累计充电值BATTCH。更具体地说,电流/电压传感器204探测从蓄电池14输出的电流和流进蓄电池14的输入电流(充电电流),并且在执行程序的任何时候计算前者的累计值(BATTDISCH)和后者的值(BATTCH)。在本实施例中,假设累计放电值BATTDICH是正值,累计充电值BATTCH是负值。当牵引电动机3开始对引擎1助推时(在图11A的S49步),将累计放电值BATTDISCH复位,而由牵引电动机开始再生电能时(图11B的S73步)将累计充电值BATTCHG复位。
在接下来的步骤S2中,计算蓄电池14的放电深度DOD。尤其是,如果BATTFULL代表蓄电池14的电容,即当蓄电池处于满充电状态时蓄电池能够放电的电量,则可以利用下列方程(1)计算放电深度DOD:
DOD=(BATTDISCH+BATTCH)/BATTFULL …(1)
因此,蓄电池14中的剩余电量BATTREM可由方程BATTREM=BATTFULL-(BATTDISCH+BATTCH)计算,剩余电量率RREM=BATTREM/BATTFULL=1-DOD。
在步骤S3中判断充电许可标识FDISCH,当设为“1”时,表示蓄电池14放电。如果保持FDISCH=1,则在S9步骤中判断放电深度DOD是否小于预定的参考值DODL,该参考值对应于蓄电池14中储存电量的下限。如果保持DOD≥DODL,即蓄电池14中的剩余电量BATTREM小,则在步骤S11将放电许可标识FDISCH设为“0”,从而禁止蓄电池14的放电,随后终止程序。
如果在步骤S9保持DOD<DODL,则根据步骤S10的放电深度DOD修正ASSISTP图,以确定许可的放电量ASSISTP。如例如图6所示来设置ASSISTP图,使得直到放电深度DOD达到一个相应于蓄电池14中充电的中间量的预定参考值DODM,放电许可量ASSISTP才设为一个预定的固定值ASSISTP0,并且当放电深度DOD处于预定的参考值DODM至预定的参考值DODL的范围中时,ASSISTP值设为随放电深度DOD增大的较小值。
在随后的步骤S12中,判断助推许可标识FASSIST是否为“1”,当设定为1时,表示牵引电动机3可助推引擎1,向驱动轮5提供转矩。如果保持FASSIST=1,则在步骤S13判断累计放电值是否等于或大于允许的放电量ASSISTP。如果保持BATTDISCH<ASSISTP,则程序立即中止,即继续许可牵引电动机3对引擎1的助推,而如果BATTDISCH≥ASSISTP,则在S14步骤设置助推许可标识FASSIST为“0”,从而禁止牵引电动机3的助推,接着终止程序。
S13和S14步骤使得避免蓄电池14充电过量成为可能,因为当累计放电值BATTDISCH等于或大于允许的放电量ASSISTP时,牵引电动机3的助推被禁止。
另一方面,如果在S12步骤保持FASSIST=0,即意味着牵引电动机3的助推不被许可,则在S16步骤中判断助推执行标识FASSISTON是否为“1”,当标识FASSISTON设为1时,表示正在执行牵引电动机1的助推。如果保持FASSISTON=1,则立即终止程序,而如果保持FASSISTON=0,则在S17步骤助推许可标识FASSIST设为“1”,随后终止程序。
如果在S3步骤保持FDISCH=0,即意味着蓄电池14不许放电,则在S14步骤判断放电深度DOD是否小于预定的参考值DODR,在等于或低于预定参考值DODR时,蓄电池的可放电状态可以恢复(见图6)。如果保持DOD≥DODR,则程序立即终止,继续禁止蓄电池14的放电,而如果通过再生保持DOD<DODR,则在S5步骤将放电许可标识FDISCH设为“1”,并在S6步骤判断放电深度DOD是否小于表示蓄电池14几乎全充电状态的预定参考值DODF(见图6)。如果保持DOD≥DODF,即意味着蓄电池14没有被完全充电,则在S8步骤设置充电许可标识FCH为“1”,从而允许蓄电池14充电或放电。另一方面,如果保持DOD<DODF,即意味着蓄电池14几乎被完全充电,则在S7步骤设置充电许可标识FCH为“0”,从而禁止蓄电池14充电,随后终止程序。
图7是执行牵引电动机控制过程的程序,由MOTECU12在预定的时间间隔中执行。此程序包括两步:步骤S21,执行电动机所需的输出判定过程(图8所示的子程序);步骤S22,执行电动机输出判定过程(图11A和11B所示的子程序)。
图8是电动机所需的输出判定过程的子程序,首先,在S31步骤,探测引擎转速NE和节流阀开口θTH(或交替地加速器开口θAP)。然后,在S32步,根据探测到的这些参数值修正ENGPOWER图,以确定所需的输出ENGPOWER,即汽车驾驶员所需的引擎输出。
在随后的S33步骤中,根据汽车速度VCAR修正RUNRST表,确定汽车的行驶阻力RUNRST,即汽车行驶时受到的阻力。RUNRST表的设置例如如图9所示,当汽车速度VCAR增加时,行驶阻力RUNRST设为较高值。然后,在S34步骤中,通过从引擎所需输出ENGPOWER中减去行驶阻力RUNRST计算出额外输出EXPOWER。在以上的判断和计算中,引擎所需输出ENGPOWER和行驶阻力RUNRST均用瓦特(W)计算。
在随后的步骤S35中,根据引擎转速NE和额外输出EXPOWER修正MOTORPOWER图,以判断电动机所需的输出(MOTORPOWER)。在图10中L曲线以上的区域,即额外输出EXPOWER大的工作区,电动机所需输出MOTORPOWER设为正值(MOTORPOWER>0),因而允许牵引电动机3助推。另一方面,在图10中L曲线以下的区域,即在额外输出EXPOWER设为一个小正值或负值的工作区中,电动机所需输出MOTORPOWER设为一负值,(MOTORPOWER<0),因而允许牵引电动机3再生电能。如图10所示,曲线L随着引擎转速NE的增加而逐步升高,这意味着当转速NE较高时,电动机所需输出MOTORPOWER相对于较大的额外输出值EXPOWER设为一个正值,即允许牵引电动机3的助推。
如上所述,根据图8的过程,通过从引擎所需输出ENGPOWER中减去行驶阻力RUNRST计算引擎的额外输出EXPOWER,并根据额外输出EXPOWER和引擎转速NE确定电动机所需的输出MOTORPOWER。
图11A和11B是执行图7中S22步骤的电动机输出判定过程的子程序详图。
首先,在S41步骤中判断电动机所需输出MOTORPOWER是否大于“0”。如果保持MOTORPOWER大于“O”,则在S42步骤判断助推执行标识FASSISTON是否为“1”。如果FASSISTON=1,即意味着执行牵引电动机3对引擎1助推,则程序跳到S50步,而如果FASSISTON=0,即意味着不执行牵引电动机3对引擎1助推,则在S43步判断在节流阀开口QTH探得的变化量DTH是否大于预定的值DTHREF(大于0)。
如果保持DTH≤DTHREF,则程序跳到S51步,而如果DTH>DTHREF,即意味着需要引擎1被加速,则在S45步设置助推执行标识FASSISTON为“1”,并接着进行步骤S47的程序。
在S47步中,所有的再生标识(当执行牵引电动机3电能再生时设为“1”),即常速行驶再生标识FCRUREG,空挡再生标识FIDLEREG和减速再生标识FDREG均设为“0”。然后,在S48步设置脉动减弱标识FREDDNE为“0”,当该标识设置为“1”时,表示执行转矩脉动减弱过程(图11B中步骤S70),并在S49步设置累计放电值BATTDISCH为“0”,随后继续进行S50步骤。
在S50步,判断助推许可标识FASSIST是否为“1”。如果保持FASSIST=1,则程序跳到S53步,而如果FASSIST=0,则程序继续步骤S51。
在S51步中,助推执行标识FASSISTON设为“0”,电动机所需输出MOTORPOWER在S52步设为“0”。然后,程序进行到步骤S53,在那里电动机输出OUTPUTPOWER设置为电动机所需输出MOTORPOWER,随后终止程序。
根据以上S42至S52的步骤,只要保持电动机所需输出MOTORPOWER大于0,双动力型汽车的驱动系统就按下列的方式控制:
1)即使保持MOTORPOWER>0,也不执行牵引电动机3对引擎1的助推,除非引擎需要加速(S43,S51和S52);和
2)当引擎需要加速时,如果允许引擎1的倾斜操作和牵引电动机3对引擎1的助推,则双动力型汽车的驱动系统可利用牵引电动机3对引擎1的助推运行,使得供应给引擎1的混合物的空气-燃料比控制在一个固定的偏斜值或一个根据牵引电动机3对引擎1的助推量的偏斜值,而如果不允许引擎1的倾斜操作和牵引电动机3对引擎1的助推,则双动力型汽车的驱动系统可利用牵引电动机3对引擎1的助推工作,使得混合物的空气-燃料比控制在一个正常值或一个理想配比值(步骤S43,S45,和S50)。
如果在S41步保持MOTORPOWE≤0,则程序进行图11B中的S61步,在那里判断PDU13的保护电阻的温度TD是否高于预定值TDF。如果TD>TDF,则担心牵引电动机3驱动电路的温度太高,以至于牵引电动机不能进行电能的再生,使得所有的再生标识在S63步设为“0”,从而禁止再生,并且在S71步,电动机所需输出MOTORPOWE设为“0”,随后进行图11A中的步骤S53。这样使得PDU驱动电路13的温度不会变的过高。
另一方面,如果在S61步保持TD≤TDF,则在S62步判断充电许可标识是否为“1”。如果FCH=0,即不允许蓄电池充电或放电,则程序进行到S63步,禁止再生。这能够防止蓄电池14充电过量、由于蓄电池14充电过量而造成的PDU13的热量损失以及其它不便。
如果在步骤S62保持FCH=1,表明蓄电池14的充电是允许的,在步骤72判定再生标识FCRUREG,FIDLEREG,和FDREG中的任何一个是否为“1”。如果其中的任一标识为“1”,程序跳转到步骤S64,而如果所有的再生标识为“0”,则在步骤S73累计充电值BATTCHG被设为“0”,此后程序进入步骤S64。
在步骤S64,判定减速标识FDEC是否为“1”,当其设为“1”时,表明要求引擎1的减速(见图16中的步骤S144到S146)。如果保持FDEC=1,则在步骤S65完成减速再生过程(通过执行如图12中所示的子程序),然后程序进入到步骤S53。
如果保持FDEC=0,这表明不要求引擎1的减速,在步骤S66判定空载标识FIDLE是否为“1”,当其设为“1”时,表明引擎1是空载的(见图16中的步骤S151到S155)。如果保持FIDLE=0,表明引擎1不是空载,在步骤S67完成常速行驶再生过程,然后程序进入到步骤S53。
在常速行驶再生过程中,常速行驶再生标识FCRUREG被设为“1”,然后根据引擎转速NE和额外输出EXPOWER,常速行驶再生量图(没有示出)被恢复,由此决定了一个常速行驶再生量CRURGE。然后,电动机要求的输出MOTORPOWER被设为确定的常速行驶再生量CRURGE。
如果在步骤S66中保持FIDLE=1,在步骤S68判定转动脉动标识FDNE是否为“1”,当其设为“1”时,表明引擎1的转速脉动很大。如果保持FDNE=1,在步骤S70完成转矩的减脉动过程,而如果保持FDNE=0,则在步骤S69完成空载的再生过程,然后程序进入到步骤S53。
在转矩的减脉动过程中,电动机所需的输出MOTORPOWER被判定为降低引擎转速脉动的值。在空载的再生过程中,空载的再生标识FIDLEREG被设为“1”,且根据蓄电池14的放电深度DOD,空载的再生量IDLEREG被确定。然后,电动机所需的输出MOTORPOWER被设为确定的空载的再生量IDLEREG。
如上所述,根据图11A和11B的电动机输出判定过程,基于在图8过程中判定的电动机所需的输出MOTORPOWER,以及依赖于根据蓄电池14中剩余电量确立的助推许可标识FASSIST和充电许可标识FCH的状态,牵引电动机3可有选择地设为以下模式之一,一种助推模式,在此模式中牵引电动机3助推引擎1(通过步骤S45到S50,和S53),一种再生模式,在此模式中电能再生被执行(通过步骤S65,S67,和S69),和一个零输出模式,在此模式中牵引电动机3不产生输出(通过步骤S52和S71)。这使得有可能控制牵引电动机3以便于以一种合适的方式执行引擎1的助推和电能的再生,由此双动力型汽车驱动系统的转矩产生性能和节油效果都可得到提高,而同时保持蓄电池14中充足的剩余电量。
图12表示一个在图11B中步骤S65被执行的用于完成减速再生过程的子程序。
首先,在步骤S111助推执行标识FASSISTON被设为“0”,且在步骤S112减脉动标识FREDDNE被设为“0”。然后,图8中的步骤35判定的电动机所需的输出MOTORPOWER如步骤S113一样被采用。也就是说,在减速期间,在图10的MOTORPOWER图中保持EXPOWER<0的区域被恢复,且得到的数值MOTORPOWER被原样采用。
然后,参考图14A和14B(保持EXPOWER<0的区域),将描述设定MOTORPOWER图的映射值的方法。在这些图中,每根实线表示牵引电动机3的一个再生输出限度REGLMT(NE),且虚线表示引擎刹车损失的能量BRKPOWER(NE)。这些参数的(NE)表明这些参数是引擎转速NE的函数。根据牵引电动机3的规范确定再生输出限度REGLMT(NE)以致于在引擎转速NE低于预设值NE0的范围内其与引擎转速NE成比例增加,而在NE值等于或高于预设值NE0的范围内为一个固定的值。当引擎转速NE增加时,引擎刹车损失的能量BRKPOWER(NE)增加。
如果图中的坐标点用(NE,EXPOWER)表示,在坐标点(NE1,EXPOWER11)的映射值被设定为MOTORPOWER=EXPOWER11-BRKPOWER(NE1),且在坐标点(NE1,EXPOWER1)的映射值被设定为MOTORPOWER=EXPOWER1-BRKPOWER(NE1)=REGLMT(NE1)-BRKPOWER(NE1)。在保持NE=NE1和EXPOWER>EXPOWER1的区域,该区域的映射值被设定为MOTORPOWER=REGLMT(NE1)-BRKPOWER(NE1)。
在坐标点(NE2,EXPOWER21)的映射值被设定为MOTORPOWER=EXPOWER21-BRKPOWER(NE2)。在保持NE=NE2和EXPOWER>EXPOWER0的区域,该区域中的映射值被设定为MOTORPOWER=REGLMT(NE2)-BRKPOWER(NE2)=EXPOWER0-BRKPOWER(NE2)。
下一步,在步骤S114减速再生标识FDREG被设定为“1”,且在随后的步骤S115,一个最佳的转速NEOPT以下述方式被计算:
1)在图14A和14B中,如果当前引擎操作条件对应于坐标点(NE1,EXPOWER1),保持EXPOWER1=REGLMT(NE1),因此NEOPT被设为NE1。
2)如果当前引擎操作条件对应于坐标点(NE1,EXPOWER11),若NE=NE11则再生输出变成最大,因此NEOPT被设为NE11。
3)如果当前引擎操作条件对应于坐标点(NE1,EXPOWER12),若NE=NE12则再生输出变成最大,因此NEOPT被设为NE12。
4)如果当前引擎操作条件对应于坐标点(NE1,EXPOWER13),若NE=NE0则再生输出变成最大,因此NEOPT被设为NE0。
5)如果当前引擎操作条件对应于坐标点(NE2,EXPOWER21),若NE=NE21则再生输出变成最大,因此NEOPT被设为NE21。
6)如果当前引擎操作条件对应于坐标点(NE2,EXPOWER22),若NE=NE0则再生输出变成最大,因此NEOPT被设为NE0。
下一步,在步骤S116计算引擎转速NE的当前值和最佳转速NEOPT间的差SNE(=NEOPT-NE),接着终止当前的程序。
如上所述,基于由图11A和11B过程计算的电动机输出OUTPUTPOWER,MOTECU12控制PDU13,由此控制牵引电动机3的操作模式(助推模式,再生模式,零输出模式)。
图13表示控制传动装置4的程序,例如,在预定时间间隔内该程序被T/MECU16执行。
首先,在步骤121,取出各种所探测到的控制参数,如加速器开口θAP和车速VCAR,且基于步骤S122的加速器开口θAP和车速VCAR,计算传动齿轮速比的基值RBASE。在下一步S123,基于图12的步骤S116计算的转速差SNE,探测到的驱动轴转速NM(或车速VCAR),和基本传动齿轮速比RBASE,计算一个理想的传动齿轮速比RK。计算理想的传动齿轮速比RK以便转速差SNE变为等于0。如果即使通过改变传动齿轮速比也会因转速差SNE太大而不能设为SNE=0,RK值被设为这样的值以便SNE值变得最小因此可通过改变传动齿轮速比来控制。另外,如果未执行减速再生过程,转速差值SNE被设为“0”。
下一步,在步骤S124计算理想传动齿轮速比RK和探测到的传动齿轮速比RG之间的差值SR(=RK-GR),和根据传动齿轮速比差值SR计算传动致动器的操作量。然后,这样计算的传动致动器303的操作量在步骤S125的输出寄存器中被设定,接着结束当前程序。
如上所述,当根据图12和图13过程执行减速再生时,计算牵引电动机3的再生输出变成最大的最佳转速(引擎转速=电动机转速)NEOPT,且控制传动装置4的传动齿轮速比以便于电动机转速变得等于计算的最佳转速NEOPT,借此在汽车的减速期间产生的动能可被有效地聚集为电能。另外,因为根据电动机再生输出限度REGLMT计算最佳转速NEOPT,可避免牵引电动机过热和传动齿轮速比的额外变化。
根据探测到的引擎转速NE和额外输出EXPOWER确定在减速再生期间电动机所需的输出MOTORPOWER。因此,即使当实际的引擎转速NE不变得等于最佳转速NEOPT,MOTORPOWER值也会被设定为一个适合实际引擎转速NE的值。
下一步,由ENGECU11执行的引擎控制在下面描述。图15表明对于整个引擎控制的程序,它在诸如预设的时间间隔内被执行。
首先,不同引擎操作参数,如引擎转速NE和吸管绝对压PBA在步骤S131被探测到,然后顺序执行步骤S132的操作条件判定过程,步骤S133的燃料供应控制过程,步骤S134的点火时间控制过程,和在步骤S135的DBW控制过程(通过节流致动器105的节流阀开口控制过程)。
图16表示用于完成图15中步骤S132的操作条件判定过程的一个子程序。
在步骤S141,判定在探测到的节流阀开口θTH(当前θTH值-此前θTH值)中的变化量DTH是否大于预定的正值DTHA。如果保持DTH>DTHA,在步骤S143加速标识FACC被设为“1”,而如果保持DTH≤DTHA,在步骤S142加速标识FACC被设为“0”,然后程序进入步骤S144。
在步骤S144,判定在节流阀开口θTH中的变化量DTH是否小于预定的负值DTHD。如果保持DTH<DTHD,在步骤S146减速标识FDEC被设为“1”,而如果保持DTH≥DTHA,在步骤S145减速标识被设为“0”,然后程序进入步骤S147。
在步骤S147,判定引擎冷却剂温度TW是否等于或大于预定值TWREF。如果保持TW>TWREF,在步骤S148进一步判定触媒温度TCAT是否等于或大于预定参考值TCATREF。如果在步骤S147保持TW<TWREF,或在步骤S148保持TCAT<TCATREF,在步骤S150倾斜标识FLEAN被设为“0”以阻止引擎1的倾斜操作。另一方面,如果在步骤S147保持TW≥TWREF和在步骤S148同时保持TCAT≥TCATREF,在步骤S149倾斜标识FLEAN被设为“1”以允许引擎1的倾斜操作。
在随之的步骤S151,判定车速VCAR是否等于或小于0。如果保持VCAR≤0,这表明汽车处于停止状态,则在步骤S152判定传动装置4是否处于空档。如果传动装置4处于空档,在步骤S153判定加速器开口θAP是否等于或小于预定的空载值θIDLE。如果所有对于步骤S151到S153的问题都是肯定的(YES),则判断引擎是空载,因此在步骤S154空载标识FIDLE被设为“1”,而如果所有对于步骤S151到S153的问题都是否定的(NO),则判断引擎不是空载,因此在步骤S155空载标识FIDLE被设为“0”,然后程序进入步骤S156。
在步骤S156,判定引擎转速NE的变化量ΔNE(ΔNE=当前NE值-此前值)是否等于或大于预设值ΔNEREF。如果保持ΔNE≥ΔNEREF,在步骤S157转动脉动标识FDNE被设为“1”,而如果保持ΔNE<ΔNEREF,在步骤S158转动脉动标识FDNE被设为“0”,随之结束程序。
在图15步骤S133执行的燃料供应控制过程中,如果保持减速标识FDEC=1,供应给引擎的燃料被中断。另一方面,如果保持FDEC=0,则根据引擎的工作状况如引擎的转速NE和吸管绝对压PBA,计算燃料喷射阀106被打开的阀开启时间以及燃料喷射阀106的阀开启定时,并根据计算出的值执行燃料的供给控制。
在步骤S134执行的点火定时控制中,根据引擎操作条件计算点火定时,如引擎转速NE和吸管绝对压PBA,并根据计算的值执行点火定时控制。
在步骤S135执行的DBW控制中,根据加速器开口θAP计算节流阀开口θTH的理想值,引擎转速NE,等等,以及节流阀开口θTH被控制到计算的理想值。
本发明不限定于上述的实施例,但是可通过各种改进和变化得以完成。例如,作为电能存储装置,具有大的静电容量的电容器可被用于结合或代替蓄电池14使用。
另外,本发明还可被应用到一个引擎,代替所谓的DBW型的节流阀103,该引擎采用与加速器踏板机械式联结的通常类型的节流阀。
另外,虽然在本实施例中,如果保持FCH=0,即如果不允许蓄电池充电,或如果PDU13保护电阻的温度TD高于预设值TDF,电能再生被禁止(再生量=0)(图11B中步骤S61、S62、S63和S71),这是没有限制的。或者,再生量可被设为很小的值。
再另外,传动装置4还可被能够以逐级的方式改变传动齿轮速比的自动传动装置所代替。在这种情况下,档位被控制以使电机转速假定为一个最接近最佳转速NEOPT的值,以便于实际转速不超出图14中的转速NE0。
Claims (8)
1.一种双动力型汽车的控制装置,其中,双驱动型汽车包括驱动轮、内燃机、由引擎驱动的驱动轴、用电能直接驱动所述驱动轴并具有将驱动轴的动能转换成电能的再生功能的牵引电动机、一个安装在汽车的驱动轮和引擎及牵引电动机之间的传动装置和一个向牵引电动机输送电能并将牵引电动机输出的电能储存起来的电存储装置,控制系统包括:
理想输出的计算装置,根据汽车的减速状况计算牵引电动机的理想输出;
最佳转速计算装置,根据由所述理想输出计算装置计算出的理想输出及所述牵引电动机的再生输出限度,计算牵引电动机的最佳转速,在该转速下牵引电动机提供最大再生输出;和
传动齿轮速比控制装置,控制传动装置的传动齿轮速比,使得牵引电动机的转速等于最佳转速。
2.如权利要求1所述的控制装置,其特征在于所述理想输出计算装置包括驾驶员所需输出的计算装置,以根据包括引擎转速的引擎工作状态计算所述汽车的驾驶员所需的输出;行驶阻力计算装置,以根据汽车的行驶状况计算行驶阻力;和引擎额外输出计算装置,以根据驾驶员所需的输出和行驶阻力计算引擎的额外输出,所述的理想输出计算装置根据引擎的额外输出计算牵引电动机的理想输出。
3.根据权利要求2所述的控制装置,其特征在于所述的最佳转速计算装置根据引擎的转速计算牵引电动机的再生输出限度,并根据牵引电动机的理想输出和再生输出限度,计算牵引电动机的最佳转速。
4.根据权利要求1所述的控制装置,其特征在于所述的再生输出限度的设置使得在引擎转速低于预定值的范围内随引擎的转速正比例地增加,并在引擎转速等于或大于预定值的范围内设为固定值。
5.根据权利要求3或4所述的控制装置,其特征在于所述的传动齿轮速比控制装置根据引擎转速和最佳转速之间的差值控制所述传动装置的传动齿轮速比,使得所述差值最小。
6.根据权利要求5所述的控制装置,其特征在于所述汽车包括加速踏板,含有从动轴的传动装置,含有根据加速踏板的加速量和汽车的行驶速度计算传动装置基本传动齿轮速比的装置的所述的传动齿轮速比控制装置,该传动齿轮速比控制装置根据引擎转速和最佳转速、从动轴的转速以及由所述装置计算的基本传动齿轮速比之间的差值计算理想的传动齿轮速比,所述传动齿轮速比控制装置将所述传动齿轮速比控制到算出的理想传动齿轮速比。
7.根据权利要求1至4中任何一项所述的控制装置,其特征在于包括计算电存储装置中剩余电量的剩余电量计算装置,和根据剩余电量计算装置计算出的剩余电量限定牵引电动机输出的电动机输出限定装置。
8.根据权利要求1至4中任何一项所述的控制装置,其特征在于所述的传动装置是一种变速传动装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP14972796A JP2843883B2 (ja) | 1996-05-22 | 1996-05-22 | ハイブリッド車両の制御装置 |
| JP149727/96 | 1996-05-22 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1169378A CN1169378A (zh) | 1998-01-07 |
| CN1079056C true CN1079056C (zh) | 2002-02-13 |
Family
ID=15481498
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN97113243A Expired - Fee Related CN1079056C (zh) | 1996-05-22 | 1997-05-22 | 双动力型汽车的控制装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US5942879A (zh) |
| EP (1) | EP0808735B1 (zh) |
| JP (1) | JP2843883B2 (zh) |
| KR (1) | KR100261956B1 (zh) |
| CN (1) | CN1079056C (zh) |
| DE (1) | DE69705771T2 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7301245B2 (en) | 2002-01-30 | 2007-11-27 | Toyota Jidosha Kabushiki Kaisha | Control system for a vehicle power supply and control method thereof |
| CN100435450C (zh) * | 2004-10-05 | 2008-11-19 | 现代自动车株式会社 | 用于控制皮带传动混合动力车辆的再生制动的方法 |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2857666B2 (ja) * | 1996-06-12 | 1999-02-17 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3096447B2 (ja) * | 1997-09-17 | 2000-10-10 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| US6020697A (en) * | 1997-11-14 | 2000-02-01 | Honda Giken Kogyo Kabushiki Kaisha | Hybrid vehicle |
| JP3401181B2 (ja) * | 1998-02-17 | 2003-04-28 | トヨタ自動車株式会社 | ハイブリッド車の駆動制御装置 |
| US6554088B2 (en) * | 1998-09-14 | 2003-04-29 | Paice Corporation | Hybrid vehicles |
| JP3347080B2 (ja) * | 1998-12-18 | 2002-11-20 | 本田技研工業株式会社 | ハイブリッド車の始動判定装置 |
| JP3666727B2 (ja) * | 1999-07-05 | 2005-06-29 | 本田技研工業株式会社 | ハイブリッド車両駆動装置 |
| US6757597B2 (en) | 2001-01-31 | 2004-06-29 | Oshkosh Truck | A/C bus assembly for electronic traction vehicle |
| US7905813B2 (en) * | 1999-09-28 | 2011-03-15 | Borealis Technical Limited | Electronically controlled engine generator set |
| JP3506975B2 (ja) * | 1999-10-29 | 2004-03-15 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3542938B2 (ja) * | 1999-10-29 | 2004-07-14 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP2001146121A (ja) * | 1999-11-19 | 2001-05-29 | Toyota Motor Corp | 変速機付きハイブリッド車両の制御装置 |
| JP2001238303A (ja) * | 2000-02-24 | 2001-08-31 | Mitsubishi Motors Corp | ハイブリッド電気自動車の回生制御装置 |
| JP3712910B2 (ja) | 2000-03-23 | 2005-11-02 | トヨタ自動車株式会社 | 車両の変速機制御装置 |
| JP3700531B2 (ja) * | 2000-04-05 | 2005-09-28 | スズキ株式会社 | ハイブリッド車両の制御装置 |
| JP3768382B2 (ja) * | 2000-05-22 | 2006-04-19 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP4557402B2 (ja) * | 2000-09-19 | 2010-10-06 | トヨタ自動車株式会社 | 車両用駆動制御装置 |
| US7379797B2 (en) | 2001-01-31 | 2008-05-27 | Oshkosh Truck Corporation | System and method for braking in an electric vehicle |
| JP4029592B2 (ja) * | 2001-09-05 | 2008-01-09 | 株式会社日立製作所 | 補助駆動装置およびこれを搭載した自動車 |
| JP3588090B2 (ja) * | 2002-06-27 | 2004-11-10 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| US7395887B2 (en) * | 2004-12-23 | 2008-07-08 | Bosch Rexroth Corporation | Complementary regenerative torque system and method of controlling same |
| US7600595B2 (en) | 2005-03-14 | 2009-10-13 | Zero Emission Systems, Inc. | Electric traction |
| US7543454B2 (en) | 2005-03-14 | 2009-06-09 | Zero Emission Systems, Inc. | Method and auxiliary system for operating a comfort subsystem for a vehicle |
| JP4513751B2 (ja) * | 2006-01-13 | 2010-07-28 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| US7921945B2 (en) | 2006-02-21 | 2011-04-12 | Clean Emissions Technologies, Inc. | Vehicular switching, including switching traction modes and shifting gears while in electric traction mode |
| US8565969B2 (en) | 2007-04-03 | 2013-10-22 | Clean Emissions Technologies, Inc. | Over the road/traction/cabin comfort retrofit |
| JP5001566B2 (ja) * | 2006-03-23 | 2012-08-15 | 三菱ふそうトラック・バス株式会社 | 電気自動車の制御装置 |
| DE102006022384B4 (de) * | 2006-05-12 | 2020-11-19 | Robert Bosch Gmbh | Verfahren zum Aufheizen oder Warmhalten einer Abgasreinigungsvorrichtung eines Fahrzeuges |
| US7921950B2 (en) | 2006-11-10 | 2011-04-12 | Clean Emissions Technologies, Inc. | Electric traction retrofit |
| US8234031B2 (en) | 2007-02-22 | 2012-07-31 | Mack Trucks, Inc. | Hybrid vehicle energy management methods and apparatus |
| JP5512288B2 (ja) | 2007-02-22 | 2014-06-04 | マック トラックス インコーポレイテッド | ハイブリッド車両補助装備のエネルギー管理 |
| JP4906164B2 (ja) * | 2007-07-19 | 2012-03-28 | アイシン・エィ・ダブリュ株式会社 | 地図表示装置、地図表示方法及びコンピュータプログラム |
| JP5163000B2 (ja) * | 2007-08-02 | 2013-03-13 | 日産自動車株式会社 | ハイブリッド車両の回生制御装置 |
| CN101925497B (zh) * | 2008-02-08 | 2015-03-25 | 沃尔沃技术公司 | 用于运行混合动力车辆的方法及混合动力车辆 |
| KR20110129980A (ko) | 2008-03-19 | 2011-12-02 | 클린 에미션스 테크놀로지스, 인코포레이티드 | 전기 견인 시스템 및 방법 |
| US9758146B2 (en) | 2008-04-01 | 2017-09-12 | Clean Emissions Technologies, Inc. | Dual mode clutch pedal for vehicle |
| FR2945243B1 (fr) * | 2009-05-11 | 2012-06-01 | Renault Sas | Systeme de commande du couple aux roues d'un vehicule equipe d'au moins un moteur electrique. |
| US9631528B2 (en) | 2009-09-03 | 2017-04-25 | Clean Emissions Technologies, Inc. | Vehicle reduced emission deployment |
| JP5316724B2 (ja) * | 2011-03-23 | 2013-10-16 | トヨタ自動車株式会社 | 車両用駆動装置 |
| WO2013035294A1 (ja) * | 2011-09-08 | 2013-03-14 | マツダ株式会社 | ハイブリッド自動車及びハイブリッド自動車におけるエンジン及びモータジェネレータの仕様設定方法 |
| CN103129565A (zh) * | 2011-11-24 | 2013-06-05 | 金鹰重型工程机械有限公司 | 混合动力传动系统 |
| CN102705088B (zh) * | 2012-06-26 | 2015-11-25 | 上海三一重机有限公司 | 一种电驱动矿车传动系统控制方法及运用该方法的矿车 |
| JP2017094829A (ja) * | 2015-11-20 | 2017-06-01 | いすゞ自動車株式会社 | ハイブリッド車両及びその制御方法 |
| CN108773298A (zh) * | 2018-06-08 | 2018-11-09 | 北京长城华冠汽车科技股份有限公司 | 狂暴加速模式的控制方法、存储介质和电动汽车 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3923115A (en) * | 1971-10-29 | 1975-12-02 | Juergen Helling | Hybrid drive |
| US4165795A (en) * | 1978-02-17 | 1979-08-28 | Gould Inc. | Hybrid automobile |
| EP0710787A2 (en) * | 1994-11-04 | 1996-05-08 | Aisin Aw Co., Ltd. | Starting system with energy recovery for automotive vehicles |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4407132A (en) * | 1980-02-20 | 1983-10-04 | Daihatsu Motor Co., Ltd. | Control apparatus and method for engine/electric hybrid vehicle |
| US4305254A (en) * | 1980-02-20 | 1981-12-15 | Daihatsu Motor Co., Ltd. | Control apparatus and method for engine/electric hybrid vehicle |
| JPH05161216A (ja) * | 1991-12-05 | 1993-06-25 | Honda Motor Co Ltd | 電動車両の変速制御装置 |
| JPH05229351A (ja) * | 1992-02-19 | 1993-09-07 | Aisin Aw Co Ltd | 車両用電動装置 |
| DE4217668C1 (de) * | 1992-05-28 | 1993-05-06 | Daimler Benz Ag | Verfahren zur Steuerung eines ein Fahrzeug antreibenden Hybridantriebes |
| JP2897624B2 (ja) * | 1993-11-25 | 1999-05-31 | 大同特殊鋼株式会社 | 管材へのパージガス供給装置 |
| JPH07150375A (ja) * | 1993-11-25 | 1995-06-13 | Tokin Corp | 洗浄液 |
| JP3534271B2 (ja) * | 1995-04-20 | 2004-06-07 | 株式会社エクォス・リサーチ | ハイブリッド車両 |
| DE19623847A1 (de) * | 1995-06-16 | 1996-12-19 | Aisin Aw Co | Steuerungssystem für eine Fahrzeugantriebseinheit |
| JP3171079B2 (ja) * | 1995-07-24 | 2001-05-28 | トヨタ自動車株式会社 | 車両用駆動制御装置 |
| US5637987A (en) * | 1995-12-18 | 1997-06-10 | General Motors Corporation | Regenerative vehicle launch |
-
1996
- 1996-05-22 JP JP14972796A patent/JP2843883B2/ja not_active Expired - Fee Related
-
1997
- 1997-05-13 US US08/855,249 patent/US5942879A/en not_active Expired - Lifetime
- 1997-05-16 DE DE69705771T patent/DE69705771T2/de not_active Expired - Lifetime
- 1997-05-16 EP EP97108049A patent/EP0808735B1/en not_active Expired - Lifetime
- 1997-05-20 KR KR1019970019437A patent/KR100261956B1/ko not_active IP Right Cessation
- 1997-05-22 CN CN97113243A patent/CN1079056C/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3923115A (en) * | 1971-10-29 | 1975-12-02 | Juergen Helling | Hybrid drive |
| US4165795A (en) * | 1978-02-17 | 1979-08-28 | Gould Inc. | Hybrid automobile |
| EP0710787A2 (en) * | 1994-11-04 | 1996-05-08 | Aisin Aw Co., Ltd. | Starting system with energy recovery for automotive vehicles |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7301245B2 (en) | 2002-01-30 | 2007-11-27 | Toyota Jidosha Kabushiki Kaisha | Control system for a vehicle power supply and control method thereof |
| CN100435450C (zh) * | 2004-10-05 | 2008-11-19 | 现代自动车株式会社 | 用于控制皮带传动混合动力车辆的再生制动的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE69705771D1 (de) | 2001-08-30 |
| JPH09310755A (ja) | 1997-12-02 |
| CN1169378A (zh) | 1998-01-07 |
| JP2843883B2 (ja) | 1999-01-06 |
| DE69705771T2 (de) | 2002-05-23 |
| EP0808735A1 (en) | 1997-11-26 |
| EP0808735B1 (en) | 2001-07-25 |
| KR970074123A (ko) | 1997-12-10 |
| KR100261956B1 (ko) | 2000-08-01 |
| US5942879A (en) | 1999-08-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1079056C (zh) | 双动力型汽车的控制装置 | |
| CN1124208C (zh) | 混合式车辆的控制装置 | |
| CN1105656C (zh) | 用于混合型车辆的控制系统 | |
| CN1074504C (zh) | 车辆用发电机的控制系统及其控制方法 | |
| CN1298560C (zh) | 混合动力汽车控制系统及其控制方法 | |
| CN1280128C (zh) | 汽车电动马达诊断设备 | |
| CN1241765C (zh) | 复合动力车及其控制方法 | |
| CN1068836C (zh) | 非导轨上行驶的复合动力车辆的运行方法 | |
| CN104787037B (zh) | 串联混合动力车辆的控制设备 | |
| EP1193108A3 (en) | Method and apparatus for adaptive energy management of a hybrid electric vehicle | |
| CN105383311A (zh) | 用于混合动力车辆的再生控制装置 | |
| JPH09284916A (ja) | ハイブリッド車両の制御装置 | |
| CN1927611A (zh) | 用于混合动力车辆的发动机起动控制装置 | |
| CN101060255A (zh) | 车用发电控制装置 | |
| EP1093950A3 (en) | Control system for hybrid vehicles | |
| EP1225074A3 (en) | A hybrid electric vehicle having a selective zero emission mode, and method of selectively operating the zero emission mode | |
| EP1219492A3 (en) | Method and apparatus for adaptive control of hybrid electric vehicle propulsion | |
| CN105383482A (zh) | 用于混合动力车辆的再生控制装置 | |
| CN1572564A (zh) | 动力输出装置及其控制方法及安装有动力输出装置的汽车 | |
| JPH0998515A (ja) | ハイブリッド車のエンジン制御装置 | |
| CN101031460A (zh) | 混合动力车用驱动装置及其控制方法 | |
| EP1302353A3 (en) | Control device and control method for hybrid vehicle | |
| CN101078380A (zh) | 内燃机的控制装置 | |
| CN1803505A (zh) | 车辆用电子控制装置及使用了该装置的车辆控制方法 | |
| CN1802274A (zh) | 车载蓄电池控制装置和控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20020213 |