CN1087710C - 电梯驱动机械 - Google Patents
电梯驱动机械 Download PDFInfo
- Publication number
- CN1087710C CN1087710C CN98802012A CN98802012A CN1087710C CN 1087710 C CN1087710 C CN 1087710C CN 98802012 A CN98802012 A CN 98802012A CN 98802012 A CN98802012 A CN 98802012A CN 1087710 C CN1087710 C CN 1087710C
- Authority
- CN
- China
- Prior art keywords
- driving device
- bearing
- rotor
- hauling block
- rotating element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/02—Control systems without regulation, i.e. without retroactive action
- B66B1/06—Control systems without regulation, i.e. without retroactive action electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/04—Driving gear ; Details thereof, e.g. seals
- B66B11/08—Driving gear ; Details thereof, e.g. seals with hoisting rope or cable operated by frictional engagement with a winding drum or sheave
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/04—Driving gear ; Details thereof, e.g. seals
- B66B11/043—Driving gear ; Details thereof, e.g. seals actuated by rotating motor; Details, e.g. ventilation
- B66B11/0438—Driving gear ; Details thereof, e.g. seals actuated by rotating motor; Details, e.g. ventilation with a gearless driving, e.g. integrated sheave, drum or winch in the stator or rotor of the cage motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/1004—Structural association with clutches, brakes, gears, pulleys or mechanical starters with pulleys
- H02K7/1008—Structural association with clutches, brakes, gears, pulleys or mechanical starters with pulleys structurally associated with the machine rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
Abstract
本发明公开了一种电梯驱动机械,包括一个驱动机械框架结构,一个由各轴承可转动地支撑在框架结构上并包括一个牵引滑轮的转动部分,以及一个用于驱动转动部分的机电装置。转动部分的各轴承包括一基本上仅在转动部分和框架之间传送径向力的轴承,以及一在转动部分和框架之间传送轴向力的轴承。
Description
在发明涉及一种电梯驱动机械。
牵引滑轮电梯的驱动机械包括一牵引滑轮以及一电机,牵引滑轮带有用于电梯牵引绳索槽,电机要么直接要么经由一传动机构驱动牵引滑轮。传统上,用于驱动电梯的电机一直是直流电机,但诸如鼠笼式电动机等带有电子控制的交流电机的使用日趋增加。传统结构的无齿轮电梯机械遇到的问题之一一直是它们的较大的尺寸和重量。此类电机占据相当大的空间并难于运输到现场且难于安装。在由数个大型电梯组成的电梯群中,有时甚至需要在不同的楼层上安装相邻电梯的升降机以在并排设置的电梯竖井上方为它们提供足够的空间。在较大的电梯机械中,将扭矩从驱动电机传送到牵引滑轮可能会成为问题。例如,在电机和牵引滑轮之间带有传统驱动轴的大型无齿轮电梯由于该轴的挠曲特别容易产生相当大的挠曲振动。
近来,提出了这样一些解决方案,其中,电梯电机是一同步电机,特别是带有永磁铁的同步电机。例如,说明书WO95/00432公开了一种带有永磁铁的同步电机,其具有一轴向气隙,且其中牵引滑轮直接连接于形成转子的圆盘。在所需扭矩相对较低例如约1000千克的提升载荷,以及其中电梯速度在1米/秒的量级的电梯驱动中此种解决方案是有利的。在设计用来使电梯驱动机械所需空间最小,例如不带有机械间的电梯解决方案中,此种机械具有特别的优点。
说明书FI93340公开了一种解决方案,其中,牵引滑轮分成两部分,位于转子的沿其转动轴线方向的相对两侧。成型为环状扇形体、通过气隙与转子隔开的各定子同样设置在转子的两侧。
在说明书FI95687中公开的机械中,位于其两侧、其间带有气隙的转子和定子部分位于牵引滑轮里面。这样,牵引滑轮与电机形成整体,电机设置有与每一转子部分相对应的磁化件。
说明书DE2115490A提出了一种用来驱动一缆索或绳索毂等的解决方案。该解决方案使用作用在毂凸缘边缘上的单独的直线电机装置。
对于设计载荷为数千千克和速度为每秒数米的电梯,上述说明书所提出的解决方案没有一个能产生足够大的扭矩和转速。在轴向力的控制方面会遇到其他的问题。在带有多个气隙电机中,其他的问题源于各气隙的非周期性电气和功能特性。这样,要充分利用电机,就需要增加对电机的电力驱动的特殊要求,而这些特殊要求往往导致了系统复杂、成本高。
说明书GB2116512A公开了一种带齿轮的电梯机械,其具有若干个相对小的电机来驱动单一一个牵引滑轮。这样,实现了一种进需要相对小的楼层面积的机械。GB2116512A中公开的机械可以容纳在不大于其下面的电梯竖井横截面的机械间空间中。此种有利的机械间解决方案不适用于大型无齿轮电梯的场合,因为它们通常具有一个带有一大电机的机械,所述大电机从牵引滑轮沿侧向延伸一长的距离。说明书EP565893A2公开了一种无齿轮电梯机械,包括不止一个模块式电机单元,各模块式电机单元连接在一起以驱动同样连接在一起的各牵引滑轮。在这样一种解决方案中,机械的长度在其能力通过加装一电机模件而增加时增加。在这种情况下,出现的问题是机械的长度在牵引滑轮的一侧增加,这就是为什么机械伸出下面的电梯竖井的宽度之外的原因。支撑和加强这样一个长的机械从而使其自重以及绳索吊架不发生有害的变形可能会导致昂贵和困难的解决方案。例如,一长机械的弯曲需要特殊且昂贵的支撑方案。如果弯曲或其他形式的载荷使牵引滑轮产生即使极其微小的压扁变形而变成椭圆形,也可能会导致使电梯运行舒适感下降的振动。
本发明的目的是提供一种新型的无齿轮电梯驱动机械,其可产生大型和快速电梯中所需要的扭矩、动力和转速。本发明的特征体现在权利要求1中所述的各项特征。本发明不同实施例的其他特性表述于其他权利要求之中。
采用本发明的解决方案,扭矩由两个电机或电机单元产生,与单一一个电机相比扭矩得以加倍。由两个电机单元产生的轴向力彼此平衡,从而使轴承和电机轴上的应变达到最小。
采用本发明的驱动机械,由于机械的良好扭矩特性,实现了相对于驱动机械的尺寸、性能和重量的大的牵引滑轮尺寸。例如,40000千克的轴载荷可以由重量低于5000千克的机械操纵,即使电梯速度高达9米/秒或相当高。
由于驱动机械的结构使转子和定子相对于牵引滑轮直径具有大的直径,牵引滑轮上容易产生足够的扭矩。另一方面,轴承之间沿转动轴线方向的较短的距离自动确保小的径向挠曲,从而不需要大型结构来防止这种挠曲。
特别是在对载荷能力有最高要求的电梯驱动机械的情况下,相对于大型单个电机的载荷能力,单一一个牵引滑轮由至少两个电机驱动避免了相对高的费用。通过将牵引滑轮设置在两个电机之间,可以获得紧凑的机械结构,并可以在不使用单独的驱动轴的情况下将扭矩、动力和各种力直接从机械传送到牵引滑轮。通过将两个不同电机的转子与牵引滑轮机械连接在一起,可以充分地实现这些优点。
电机转子部分与牵引滑轮的非常紧密的结合导致了这样一种机械,其中,各转动部分用作单一一个部件,能够实现更为准确的电梯运动控制。
由于驱动机械的框架用作电机/各电机的壳体以及各运动部分的轴承的承载部件,因此机械的总重量和所需空间与相应用途的传统提升机相比相对较低。
原理上讲,只有各转子需要轴承,其轴承箱容易密封。任何可以通过该密封的润滑剂可以如此便利地导引开以致它不会造成损害。
由于牵引滑轮基本上装设于各转子单元之间的接合处或者由于牵引滑轮将各转子单元沿着半径相当大的圆连接在一起,电机产生的扭矩直接从转子传送到牵引滑轮。
在本发明的驱动机械中,各气隙可以成对地进行调整从而它们具有相同的尺寸,且两个电机/电机单元的相互气隙尺寸甚至可以如此调整使得各电机/各电机单元具有相同的电力驱动。这样,可以具有由单一一个电力驱动予以驱动的两个电机/电机单元,而不会产生因机械由单一一个电力驱动进行驱动而产生的各电机/电机单元性能的不同。
由于相对于其载荷能力而言,其尺寸小重量轻,因此,就机械间布局和安装而言该机械易于处置。具有高载荷能力的电梯机械通常用于包括数部电梯的电梯群中。由于提升机械可以容纳在地板面积小于其下面的电梯竖井的横截面尺寸的机械间中,这对建筑空间的利用而言具有很大的优点。
下面结合附图通过实例描述本发明,实例本身不构成本发明范围的限制。
图1是从轴向看到的本发明提供的电梯驱动机械;
图2是图1驱动机械的局部剖开的侧视图;
图3是图2的细部图;
图4是图1驱动机械的顶视图;
图5表示本发明驱动机械的安装;
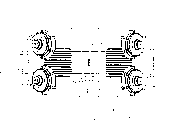
图6表示本发明另一驱动机械的横剖面;以及
图7是图6的细部图。
图1是从轴向看到的本发明提供的无齿轮驱动机械1。该图示出驱动机械1的牵引滑轮2的轮廓2a以表示牵引滑轮相对于构成机械框架一部分的框架体3的设置。框架体3优选地通过铸造制成,最好为一铸铁件。框架体也可例如由钢板件焊接而成。然而,焊接框架体可能仅能用于特殊场合2,例如作为个别情况需要制造制造非常大的机械时。如果要生产一系列若干个机械,即使高约2m的框架体也可以通过铸造便利地予以铸造。
框架体通过筋条予以加强。筋条部分是环形的,包括一或多个环,部分是径向的。筋条的径向部分从框架体3的中心部分指向沿框架体边沿设置的固定点4,5,6,7,8以及电梯操作制动器9的安装部10和驱动机械的固定腿11,驱动机械通过固定腿11固定于其底座。固定腿11位置靠近位于框架体下部的固定部位6,7。框架体具有用于风扇12的座以及带有所需孔的转速表13。牵引滑轮轴承位于盖15后面。盖设置有用于牵引滑轮轴向定位的装置的调整螺钉16的孔道。盖15还设置有用于将润滑剂加入轴承空间的注入孔42,以及用于检查润滑剂量的检查孔或窗41。
图2以局部剖侧视图的形式表示驱动机械1。图3是图2的细部图,更清楚地表示支撑结构。在这些图中,机械中心线右侧部分表示图1的A-A剖面,而左侧部分表示图1的R-R剖面。至于该图是表示这样一个驱动机械,其中牵引滑轮设置在具有分成单元的一个转子和一个定子的电机中,位于电机的两个转子单元17,18之间并安装其上;还是表示两个电机,其间的牵引滑轮2安装在两电机的转子17,18上,主要是一个定义问题。各定子/定子单元19,20固定于框架体3,3a。各气隙形成在定子和转子之间。图中所示的电机中的气隙是所谓的轴向气隙,其中磁通方向基本上平行于电机轴线。定子绕组最好是所谓的线槽绕组。转子磁铁21最好是永磁铁并通过适当的方法安装于转子17,18。转子的磁通穿过转子圆盘17,18。这样,转子圆盘的位于永磁铁下面的部分既作为磁路的一部分,又作为转子的一结构件。永磁铁可以具有不同的形状,它们可以分成并排或一个接一个放置的各磁铁组件。转子圆盘最好用铸铁铸造而成。转子圆盘和框架体两者最好如此成形,即它们同另一相同件装配在一起,从而无需单独地生产一个件及其匹配件。转子17,18配设有将其支撑在相应框架体3a,3上的滚柱轴承22。滚柱轴承22承受径向力。在非常大的电梯中,轴承必须承载数十吨的重量,因为在许多场合下,电梯轿厢和对重的几乎所有重量通过电梯绳索施加于牵引滑轮。电梯绳索和补偿绳索或链条同样使重量显著地增加,净轴向力由一辅助轴承40承受。利用与辅助轴承40相关联的轴向调整,转子17,18得以对中,从而,每一定子-转子对将具有相同的气隙。
牵引滑轮和各转子单元彼此安装在一起以形成机械的转动部分,由各轴承支撑在各框架体上。通过其罩安装于转子的辅助轴承40和与轴承轴套相接合并由盖15支撑的螺钉16用作轴承箱中的调整装置,用来沿轴向移动转子单元。当螺钉16转动时,其依转向的不同推动或拉动整个转动部分。由于各转子单元上的转子磁铁倾向于朝向与所述转子相对应的定子拉拽转动部分,且由于各转子和定子是彼此相同的,因此,可以通过转动调整螺钉直到螺钉的推力和拉力实际上为零为止而找出中心位置。寻找中心位置的一个更为准确的方法是转动转动部分并测量从定子得到的电动势。随着转动部分的转动,当从第一定子单元测得的电动势与从第二定子单元测得的电动势相同时,转动部分便得以成功对中。采用这种方式对中,两个定子-转子对具有非常一致的驱动特性,且它们可以通过单一一个电力驱动进行驱动,定子-转子对之一不比另一个定子-转子对承受更高的载荷。
定子19,20连同其绕组通过固定件安装于框架体3a,3,框架体一方面用作将定子固定就位的安装体,另一方面用作作为一体的电机和驱动机械的壳体结构。所述固定件优选为螺钉。安装于转子17,18上的是与定子相对设置的转子励磁装置。励磁装置通过将一些永磁铁以连续方式固定于转子而得以形成,各永磁铁形成一环。
定子19,20连同定子绕组用固定件安装于框架体3a,3,框架体用作将定子固定就位的底座和整个驱动机械的壳体结构两者。所述固定件优选为螺钉。转子17,18配设有与定子相对设置的励磁装置。励磁装置通过将一系列永磁铁23以连续方式固定于转子而得以形成,各永磁铁形成一环。
在永磁铁和定子之间有一基本上垂直于电机转动轴线的气隙。所述气隙的形状可以是略带锥形的,在这种情况下,锥体的中心线与转动轴线重合。在从转动轴线的方向看时,牵引滑轮2与定子19,20位于转子17,18的相对侧。
在框架体3a,3与转子17,18之间有环形腔,定子和永磁铁置于其中。
转子17,18的外边缘设置有制动表面23,24,制动器9的制动瓦25与之接合。
各转子单元设置有调准件,第一和第二转子的永磁铁可以借助于调准件定位。各永磁铁以指针方式(arrow pattern)安装。各永磁铁可以或者彼此直接相对地予以调准或者略带偏移地予以调准。由于各转子具有相同的设计结构,因此,将它们彼此相对地成对设置意味着,如果相对定子上的线槽绕组以镜象结构安装,当第一个向前转动时,第二个就会向后转动。这消除了电机操作特性对转动方向的任何可能的结构依赖性。转子磁铁也可以用与转动方向指向相同的指针结构完成。调准件是螺栓,其数量优选地可被极数除尽且其节距对应于极节距或其倍数。
图4是驱动机械1的顶视图。驱动机械侧面的连接相对框架体的连接点5,5a,8,8a的连接件5b,8b清楚可见,同样清楚可见的是位于驱动机械顶侧、连接设置在框架体顶部的连接点4,4a的连接件4b。顶部连接件4b比其他连接件具有更强的结构。顶部连接件4b设置有一环43,借助于该环驱动机械得以曳起。在图4中,驱动机械下面的电梯竖井39的壁的轮廓以虚线表示。驱动机械明显位于该轮廓内。这意味着建筑空间得以节省。由于该机械完全纳装在电梯竖井正上方的空间中,电梯列(elevator bank)上方的机械间配置得以简化。即使机械间横断面的尺寸和形状与电梯竖井的相同,机械间中驱动机械周围仍留有足够的空间,以允许进行所有正常的服务和维护操作。
通过将腿11设置在机械下边缘附近,机械在安装并固定于其底座上时可实现最大的稳定性。优选地,各腿基本上位于由定子和转子单元限定的平面之外。
图5示出将驱动机械1安装在机械间45中的方法。驱动机械安装在由钢梁制成的支座46上。通过使用一转向滑轮47,通往电梯轿厢的牵引绳索48部分和通往对重的牵引绳索48部分间的距离比对应于牵引滑轮2直径的宽度略有增加。
图6中的机械非常类似于图1-4所示的机械。对于一部实际电梯,最重要的区别在于安装牵引滑轮的方式;在于由此而造成的在机械中使用更加自由地依有待安装的每部电梯的需要而定的不同宽度(长度?)的牵引滑轮的可能性;以及在于各轴承和转轴输出端的配置方式。图7清楚地示出了轴承和转轴的输出端。
在图6的驱动机械中,牵引滑轮102的每一端固定于转子117,118。这样,牵引滑轮设置在两个转子之间。在如同本实施例中那样的轴向电机的情况下,牵引滑轮的最重要部分,即形成有绳索槽的柱体连同装设于牵引滑轮的转子磁铁环整个位于由与转动轴线垂直的两个气隙限定的两个平面之间。即使电机的内部结构与本实例的轴向电机不同,将牵引滑轮设置在转矩产生部件之间也是有利的。转子117,118利用轴承可转动地安装在框架体103,103a上,各定子119,120在相应框架体103,103a上固定就位。转子的永磁铁通过适当方法固定于转子117,118。转子的磁通经由转子圆盘通过。因此,转子圆盘位于永磁铁下面的部分既用作磁路的一部分,又用作转子的结构件。转子通过相对较大的支撑件122支撑在框架体上。大的支撑尺寸意味着支撑件122可以很好地承受径向力。支撑件即滚柱轴承具有这样的结构,其允许机械的轴向移动。此类轴承通常比防止轴向移动的轴承便宜,且它们还允许位于牵引滑轮两侧的定子-转子对中的气隙均等化。均等化调整是利用安装在框架体之一上的相对较小的辅助轴承140进行的。辅助轴承140还承受牵引滑轮与机械框架之间的轴向力。另一框架体无需设置辅助轴承。辅助轴承140安装到安装于框架体上并罩盖轴承空间的盖191上。安装在盖191上的是一用于测量角度和/或速度的由支撑件189支撑的分析器190或其他装置。传递牵引滑轮运动的转轴199的端部188穿过盖191的中心部分192,且分析器轴安装于该轴端。在机械的轴的另一端,转轴通常不需要输出,因此在该端一个更为简单的封闭轴承空间的盖187就足够了。在朝向牵引滑轮一侧,轴承空间用盖186封闭。
牵引滑轮与各转子部件彼此安装在一起以形成机械的转动部分,通过各轴承支撑在框架体上。由于牵引滑轮利用其边缘或至少利用一大直径的固定环连接于各转子部件117,118,该转动部分本身可以视作为形成机械的驱动轴。对于实际设计,这样一种轴的挠曲几乎为零,因此驱动轴轴承的设计及其在框架体上的支撑是一项相当简单的工作。辅助轴承140和承受径向力的较大的轴承122沿轴向一个接一个地设置,与图1-4所示机械中辅助轴承40和较大的轴承22的相对位置相比,这是一种不同的解决方案,在图1-4所示机械中,辅助轴承40位于较大轴承22内侧。轴承122和140的顺序设置允许在承受径向载荷的轴承122中有比辅助轴承140的径向间隙更大的径向间隙,因为足够的径向挠性可以容易地在轴承122和40之间的连接结构中实现。可以通过利用一安装套环197将辅助轴承140连接到转子部件118的辅助轴199的伸展以在机械中向内移动辅助轴的支撑点198来增加挠性。通过为辅助轴119提供一中间细部以使轴易于弯曲来实现附加挠性。这样,可以充分利用较小辅助轴承140的较小游隙。从而,辅助轴承使得可以实现准确的轴向位置调整。由于小的径向间隙,轴得以准确对中,这对分析器信号的准确性具有良好作用。
辅助轴承140通过其罩连接于机械的框架,并通过其中心经由辅助轴199连接于由牵引滑轮和各转子形成的转动部分。通过沿机械的轴向调整辅助轴和辅助轴承的相互位置,可以调整各转子相对于框架的位置。轴向调整可以例如通过为辅助轴承和辅助轴配设彼此啮合的螺纹来进行。
将驱动机械的定子和转子间的各气隙调整到相同尺寸将是有利的。另一方面,各气隙可以予以调整直到两个电机/电机单元具有相同的电力驱动。这样,两个电机/电机单元可以通过单一一个电力驱动予以驱动,而各电机/电机单元不会由于驱动机械由单一一个电力驱动进行驱动而在运转状态方面产生差异。横跨各不同气隙的各电机/电机单元的对称性也可能受到各定子和转子的相互位置,特别是各定子和转子之间转角的影响。
数种可供选择的方法可以用来与双电机驱动机械的电机相配用。当与电机相配用而在驱动机械中进行操作时,可以通过下述方法之一实现最佳化:
i)在各电机空转的情况下,对各源电压进行测量并通过调整各气隙以及可能的话,还有定子角度将各源电压调整到相同值。就此而言,存在有不同的标准:调节基波的幅值,其幅值和相位,另外还有谐波,以及它们的组合。
ii)在没有载荷连接于各电机的情况下,将各电机耦连在一起并对气隙以及可能的话,还有各定子组(stator packet)的角度进行调节以使多相电流最小。这里,同样地,可以分别地考虑基波和谐波。
iii)在载荷连接于各电机的情况下,对各电机进行测量并对各气隙以及可能的话,还有定子角度进行调节直到两电机中的电流相等为止。这是一种有利的可供选择的方案,因为纵向阻抗之间的任何差别同样可以予以考虑。
iv)载荷增加到最大值并随后通过调节各气隙以及可能的话,还有定子角度使各电机电流相等。两个电机此时将输出最大扭矩且该组合的载荷能力处于最大。
在方法i)和ii)中,在电机空转的情况下进行上述测量,因此同样使能量消耗和温升达到最小。
i)-iv)项可以适当地予以组合,例如,通过利用适当的对最大载荷能力、能力消耗和谐波进行补偿的加权系数得到一成本函数。
对于业内人士来说很明显,本发明的实施例不限于上述实例,而是可以在本发明范围内予以改变。
Claims (15)
1.一种无齿轮电梯驱动机械,包括一驱动机械框架结构,一个由各轴承可转动地支撑在框架结构上并包括一个牵引滑轮的转动部分,以及一用于驱动转动部分的机电装置,其特征在于,所述转动部分由至少两个轴承支撑,其中一个轴承是一个基本上仅在所述转动部分和所述框架之间传送径向力的轴承,而另一个是在所述转动部分和所述框架之间传送轴向力的轴承。
2.如权利要求1所述的驱动机械,其特征在于,在所述牵引滑轮和框架之间的支撑结构中,轴向支撑力和径向支撑力基本上经由单独的轴承传递。
3.如权利要求1或2所述的驱动机械,其特征在于,所述牵引滑轮相对于框架结构的位置借助于传递轴向力的轴承进行调整。
4.如权利要求1或2所述的驱动机械,其特征在于,所述机电装置包括至少两个电机,它们的转子设置用来驱动所述牵引滑轮。
5.如权利要求4所述的驱动机械,其特征在于,所述牵引滑轮位于两个电机之间。
6.如权利要求4所述的驱动机械,其特征在于,所述驱动机械包括两个电机。
7.如权利要求5所述的的驱动机械,其特征在于,所述两个不同电机的转子通过所述牵引滑轮机械连接在一起。
8.如权利要求4所述的驱动机械,其特征在于,各电机的气隙的方向基本上沿轴向。
9.如权利要求8所述的驱动机械,其特征在于,两电机的从定子到转子的气隙的方向基本上彼此相对。
10.如权利要求4所述的驱动机械,其特征在于,所述各电机定子和转子之间的各径向轴承构成一在所述驱动机械中传递径向力的支撑系统。
11.如权利要求10所述的驱动机械,其特征在于,所述牵引滑轮和所述各电机的转子固定在一起以形成机械的转动部分,所述转动部分通过轴承支撑在各定子上,且所述驱动机械包括一传递轴向力的轴承,带有一与所述轴承关联设置的调整装置,允许所述牵引滑轮和各转子的相对于各定子的位置沿轴向调整。
12.如权利要求10所述的驱动机械,其特征在于,所述驱动机械仅具有一个传递轴向力的轴承。
13.如权利要求12所述的驱动机械,其特征在于,所述传递轴向力的轴承位于所述驱动机械的一端。
14.如权利要求10所述的的驱动机械,其特征在于,所述传递轴向力的轴承通过一可在径向上挠曲的结构安装在所述驱动机械的转动部分和/或非转动框架上。
15.如权利要求14所述的的驱动机械,其特征在于,所述传递轴向力的轴承通过一具有一细腰部的轴安装在所述驱动机械的转动部分上。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FI970283A FI109596B (fi) | 1997-01-23 | 1997-01-23 | Hissin käyttökoneisto ja hissi |
| FI970283 | 1997-01-23 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1244172A CN1244172A (zh) | 2000-02-09 |
| CN1087710C true CN1087710C (zh) | 2002-07-17 |
Family
ID=8547777
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN98802012A Expired - Lifetime CN1087710C (zh) | 1997-01-23 | 1998-01-22 | 电梯驱动机械 |
| CN98802014A Expired - Lifetime CN1092130C (zh) | 1997-01-23 | 1998-01-22 | 电梯驱动机械 |
| CN98802011A Expired - Lifetime CN1087709C (zh) | 1997-01-23 | 1998-01-22 | 设定一无齿轮电梯驱动机械中各轴向气隙的大小的方法 |
| CN98802013A Expired - Lifetime CN1092132C (zh) | 1997-01-23 | 1998-01-22 | 电梯驱动机械 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN98802014A Expired - Lifetime CN1092130C (zh) | 1997-01-23 | 1998-01-22 | 电梯驱动机械 |
| CN98802011A Expired - Lifetime CN1087709C (zh) | 1997-01-23 | 1998-01-22 | 设定一无齿轮电梯驱动机械中各轴向气隙的大小的方法 |
| CN98802013A Expired - Lifetime CN1092132C (zh) | 1997-01-23 | 1998-01-22 | 电梯驱动机械 |
Country Status (14)
| Country | Link |
|---|---|
| US (5) | US6220395B1 (zh) |
| EP (4) | EP0956258B1 (zh) |
| JP (4) | JP4347910B2 (zh) |
| KR (2) | KR100501108B1 (zh) |
| CN (4) | CN1087710C (zh) |
| AT (4) | ATE446937T1 (zh) |
| AU (4) | AU5766598A (zh) |
| BR (2) | BR9807113A (zh) |
| CA (2) | CA2287459C (zh) |
| DE (4) | DE69841259D1 (zh) |
| FI (1) | FI109596B (zh) |
| HK (2) | HK1022889A1 (zh) |
| MX (1) | MXPA99006801A (zh) |
| WO (4) | WO1998032685A1 (zh) |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI109596B (fi) | 1997-01-23 | 2002-09-13 | Kone Corp | Hissin käyttökoneisto ja hissi |
| EP1013597A1 (de) * | 1998-12-15 | 2000-06-28 | Wittur AG | Getriebelose Antriebsvorrichtung für ein Hebezeug |
| US6202793B1 (en) | 1998-12-22 | 2001-03-20 | Richard N. Fargo | Elevator machine with counter-rotating rotors |
| FI118732B (fi) * | 2000-12-08 | 2008-02-29 | Kone Corp | Hissi |
| JP4722309B2 (ja) | 2000-12-27 | 2011-07-13 | 三菱電機株式会社 | 回転電機及びこの回転電機を用いた滑車駆動装置 |
| US9573792B2 (en) * | 2001-06-21 | 2017-02-21 | Kone Corporation | Elevator |
| KR20040008116A (ko) * | 2001-06-21 | 2004-01-28 | 코네 코퍼레이션 | 엘리베이터 |
| FI119234B (fi) * | 2002-01-09 | 2008-09-15 | Kone Corp | Hissi |
| WO2003062117A1 (en) * | 2002-01-16 | 2003-07-31 | Otis Elevator Company | Elevator system design including a belt assembly with a vibration and noise reducing groove configuration |
| FR2846163B1 (fr) | 2002-10-18 | 2013-06-07 | Leroy Somer Moteurs | Machine comportant une poulie et un moteur electrique, notamment pour ascenseur |
| CA2502523C (en) * | 2002-11-04 | 2012-12-18 | Kone Corporation | Elevator cable tensioning device |
| EP1460022A1 (de) * | 2003-03-20 | 2004-09-22 | Inventio Ag | Antriebseinheit für einen aufzug |
| DE20318523U1 (de) * | 2003-11-29 | 2005-05-19 | Swiss-Traction Ag | Hebezeugantrieb |
| US20050133774A1 (en) * | 2003-12-03 | 2005-06-23 | Waupaca Elevator Company, Inc. | Drive-through force transmission device and methods |
| CN1297467C (zh) * | 2003-12-04 | 2007-01-31 | 扬州三星电梯有限公司 | 永磁同步高速无齿轮曳引机 |
| WO2005080251A1 (ja) * | 2004-02-25 | 2005-09-01 | Mitsubishi Denki Kabushiki Kaisha | エレベータ用巻上機 |
| JP4619713B2 (ja) * | 2004-07-15 | 2011-01-26 | 三菱電機株式会社 | エレベータ用巻上機 |
| EP1861911A1 (de) * | 2005-03-16 | 2007-12-05 | Bosch Rexroth AG | Elektrische drehfeldmaschine |
| KR100716718B1 (ko) | 2005-09-30 | 2007-05-14 | 태창엔이티 주식회사 | 엘리베이터용 모터/발전기 시스템 |
| JP4925089B2 (ja) * | 2005-12-14 | 2012-04-25 | 三菱電機株式会社 | エレベーターのギアレス巻上機 |
| PL2219984T3 (pl) * | 2007-11-14 | 2012-01-31 | Inventio Ag | Napęd dźwigu oraz sposób napędzania i utrzymywania kabiny dźwigu, odpowiedni sposób oraz urządzenie hamulcowe i sposób spowalniania i utrzymywania kabiny dźwigu oraz przynależny sposób |
| BRPI0820045B1 (pt) * | 2007-11-14 | 2020-04-28 | Inventio Ag | acionamento de elevador para acionamento e para detenção de uma cabine de elevador, processo para acionamento e para detenção de uma cabine de elevador e instalação de elevador |
| JP5437264B2 (ja) | 2007-12-10 | 2014-03-12 | オーチス エレベータ カンパニー | エレベータ機械フレーム |
| FI123729B (fi) * | 2008-02-12 | 2013-10-15 | Kone Corp | Kuljetusjärjestelmän turvajärjestely |
| US8242736B2 (en) * | 2008-04-03 | 2012-08-14 | Honda Motor Co., Ltd. | DC motor with directionally determined torque |
| DE102009020240A1 (de) * | 2009-04-15 | 2010-11-11 | Olko-Maschinentechnik Gmbh | Treibscheiben-Schachtfördermaschine |
| CN101987711B (zh) * | 2009-07-30 | 2013-02-13 | 包文丽 | 电梯用曳引机 |
| CN101993001B (zh) * | 2009-08-25 | 2012-10-03 | 包文丽 | 电梯驱动装置 |
| JP5443929B2 (ja) * | 2009-10-01 | 2014-03-19 | 三菱電機株式会社 | 巻上機 |
| KR101332584B1 (ko) * | 2009-11-13 | 2013-11-25 | 오티스 엘리베이터 컴파니 | 베어링 카트리지 및 엘리베이터 머신 조립체 |
| JP5776163B2 (ja) * | 2010-10-15 | 2015-09-09 | 株式会社明電舎 | 巻上機 |
| EP2481701A1 (de) * | 2011-01-31 | 2012-08-01 | Siemens Aktiengesellschaft | Hubwerk für Containerkran und Containerkran |
| US10081518B2 (en) | 2013-05-28 | 2018-09-25 | Otis Elevator Company | Elevator machine and stator support structure |
| CN105283401B (zh) * | 2013-05-28 | 2018-11-27 | 奥的斯电梯公司 | 具有凹进轴承的电梯机器 |
| KR101457497B1 (ko) * | 2013-06-24 | 2014-11-04 | 주식회사 한진기공 | 크레인용 시브 롤러 |
| CN104118787B (zh) * | 2014-07-01 | 2016-04-20 | 常熟市佳能电梯配件有限公司 | 双曳引滚筒强驱动永磁同步曳引机 |
| US9840395B2 (en) * | 2015-08-03 | 2017-12-12 | Otis Elevator Company | Multi-drive thrust manager for elevator control |
| JP6480832B2 (ja) * | 2015-08-31 | 2019-03-13 | 株式会社日立製作所 | 回転電機、並びにそれを用いるエレベータ用巻上機およびエレベータ |
| CN106629351A (zh) * | 2016-12-02 | 2017-05-10 | 浙江西子富沃德电机有限公司 | 一种用于曳引机的驱动部件以及使用该驱动部件的曳引机 |
| EP3403982B1 (en) | 2017-05-18 | 2020-03-04 | Otis Elevator Company | Flexible machine frame |
| CN108928716A (zh) * | 2017-05-23 | 2018-12-04 | 奥的斯电梯公司 | 曳引机组件及电梯 |
| CN107098249B (zh) * | 2017-06-15 | 2022-11-22 | 上海史密富智能装备股份有限公司 | 一种无绳电梯及其安装调试方法 |
| CN108551247B (zh) * | 2018-06-06 | 2023-09-22 | 上海吉亿电机有限公司 | 双支撑双定子永磁同步曳引机 |
| CN113086812B (zh) * | 2021-04-23 | 2023-04-07 | 廊坊凯博建设机械科技有限公司 | 一种吊笼可自动调平的升降机 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2115490A1 (de) * | 1971-03-31 | 1972-10-12 | Stemmann Ohg A | Antrieb fur Leitungs , Kabel oder Seiltrommeln od dgl |
| EP0631970A2 (en) * | 1993-06-28 | 1995-01-04 | Kone Oy | Elevator machinery |
| EP0688735A2 (en) * | 1994-06-23 | 1995-12-27 | Kone Oy | Elevator machinery and its installation |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US925504A (en) * | 1909-02-13 | 1909-06-22 | Ferdinand Porsche | Power transmission. |
| US1237321A (en) * | 1914-08-25 | 1917-08-21 | Gen Elevator Company | Electric elevator system. |
| US1750237A (en) * | 1925-12-23 | 1930-03-11 | Mayer Philip | Slow-speed alternating-current motor mechanism |
| US3647300A (en) | 1970-04-27 | 1972-03-07 | Environment One Corp | Dual-beam fluid monitor for measuring transmitted and scattered light |
| DE2106057A1 (de) * | 1971-02-09 | 1972-09-14 | Bosch Gmbh Robert | Wechselstromgenerator |
| US4382490A (en) * | 1978-10-11 | 1983-05-10 | Ouellette Machinery Systems, Inc. | Drive train apparatus |
| SE425900B (sv) * | 1981-04-22 | 1982-11-22 | Linden Alimak Ab | Anordning vid lindrivna hissar for erhallande av linspenning |
| US4375047A (en) * | 1981-07-23 | 1983-02-22 | General Signal Corporation | Torque compensated electrical motor |
| JPS58140977U (ja) * | 1982-03-15 | 1983-09-22 | 三菱電機株式会社 | エレベ−タ用巻上機 |
| CN1006265B (zh) * | 1985-04-01 | 1989-12-27 | 陶凤白 | 一种用于无级变速的交流电动机 |
| SE446854B (sv) * | 1985-10-09 | 1986-10-13 | Bengt Kratz | Upphengningsanordning vid hiss |
| US4785213A (en) * | 1986-05-30 | 1988-11-15 | Satake Engineering Co., Ltd. | Variable speed controlled induction motor |
| US4728841A (en) * | 1986-06-16 | 1988-03-01 | Sundstrand Corporation | Dual permanent magnet generator construction |
| US4959578A (en) * | 1987-11-24 | 1990-09-25 | Axial Electric, Inc. | Dual rotor axial air gap induction motor |
| US4829205A (en) * | 1987-12-04 | 1989-05-09 | Lindgren Theodore D | Dual-rotary induction motor with stationary field winding |
| US4879484A (en) * | 1988-06-17 | 1989-11-07 | Sundstrand Corporation | Alternating current generator and method of angularly adjusting the relative positions of rotors thereof |
| US5300848A (en) * | 1989-11-14 | 1994-04-05 | Sunstrand Corporation | Dual permanent magnet generator planetary gear actuator and rotor phase shifting method |
| DE9205254U1 (zh) * | 1992-04-15 | 1992-06-17 | C. Haushahn Gmbh & Co, 7000 Stuttgart, De | |
| US5239217A (en) * | 1992-05-18 | 1993-08-24 | Emerson Electric Co. | Redundant switched reluctance motor |
| JP2647745B2 (ja) * | 1993-06-28 | 1997-08-27 | コネ オサケ ユキチュア | エレベータ機械装置 |
| FI95687C (fi) * | 1993-06-28 | 1996-03-11 | Kone Oy | Vastapainoon järjestetty hissikoneisto/hissimoottori |
| FI941596A (fi) * | 1994-04-07 | 1995-10-08 | Kone Oy | Hissimoottori |
| JPH1017245A (ja) | 1996-06-28 | 1998-01-20 | Mitsubishi Electric Corp | エレベータ用巻上機 |
| DE19632850C2 (de) * | 1996-08-14 | 1998-09-10 | Regina Koester | Treibscheibenaufzug ohne Gegengewicht |
| FI109596B (fi) | 1997-01-23 | 2002-09-13 | Kone Corp | Hissin käyttökoneisto ja hissi |
| US6202793B1 (en) * | 1998-12-22 | 2001-03-20 | Richard N. Fargo | Elevator machine with counter-rotating rotors |
-
1997
- 1997-01-23 FI FI970283A patent/FI109596B/fi not_active IP Right Cessation
-
1998
- 1998-01-22 KR KR10-1999-7006613A patent/KR100501108B1/ko not_active IP Right Cessation
- 1998-01-22 JP JP53163998A patent/JP4347910B2/ja not_active Expired - Lifetime
- 1998-01-22 AU AU57665/98A patent/AU5766598A/en not_active Abandoned
- 1998-01-22 KR KR1019997006609A patent/KR100559071B1/ko not_active IP Right Cessation
- 1998-01-22 WO PCT/FI1998/000056 patent/WO1998032685A1/en not_active Application Discontinuation
- 1998-01-22 AT AT98901355T patent/ATE446937T1/de active
- 1998-01-22 CN CN98802012A patent/CN1087710C/zh not_active Expired - Lifetime
- 1998-01-22 DE DE69841259T patent/DE69841259D1/de not_active Expired - Lifetime
- 1998-01-22 AU AU57664/98A patent/AU739588B2/en not_active Expired
- 1998-01-22 AU AU57666/98A patent/AU5766698A/en not_active Abandoned
- 1998-01-22 WO PCT/FI1998/000057 patent/WO1998032686A1/en active Application Filing
- 1998-01-22 AT AT98901354T patent/ATE338724T1/de active
- 1998-01-22 EP EP98901352A patent/EP0956258B1/en not_active Expired - Lifetime
- 1998-01-22 WO PCT/FI1998/000059 patent/WO1998032684A1/en active IP Right Grant
- 1998-01-22 DE DE69841257T patent/DE69841257D1/de not_active Expired - Lifetime
- 1998-01-22 AT AT98901352T patent/ATE446935T1/de active
- 1998-01-22 CN CN98802014A patent/CN1092130C/zh not_active Expired - Lifetime
- 1998-01-22 CA CA002287459A patent/CA2287459C/en not_active Expired - Lifetime
- 1998-01-22 AT AT98901353T patent/ATE446936T1/de not_active IP Right Cessation
- 1998-01-22 EP EP98901353A patent/EP0956259B1/en not_active Expired - Lifetime
- 1998-01-22 WO PCT/FI1998/000058 patent/WO1998032687A1/en active IP Right Grant
- 1998-01-22 MX MXPA99006801A patent/MXPA99006801A/es active IP Right Grant
- 1998-01-22 CN CN98802011A patent/CN1087709C/zh not_active Expired - Lifetime
- 1998-01-22 BR BR9807113-0A patent/BR9807113A/pt not_active IP Right Cessation
- 1998-01-22 JP JP53164098A patent/JP4128630B2/ja not_active Expired - Lifetime
- 1998-01-22 DE DE69841258T patent/DE69841258D1/de not_active Expired - Lifetime
- 1998-01-22 JP JP53163898A patent/JP4195097B2/ja not_active Expired - Lifetime
- 1998-01-22 JP JP53164198A patent/JP4153044B2/ja not_active Expired - Lifetime
- 1998-01-22 DE DE69835806T patent/DE69835806T2/de not_active Expired - Lifetime
- 1998-01-22 AU AU57667/98A patent/AU719281B2/en not_active Expired
- 1998-01-22 EP EP98901354A patent/EP0956260B1/en not_active Expired - Lifetime
- 1998-01-22 CN CN98802013A patent/CN1092132C/zh not_active Expired - Lifetime
- 1998-01-22 CA CA002277284A patent/CA2277284C/en not_active Expired - Lifetime
- 1998-01-22 BR BR9807282-0A patent/BR9807282A/pt not_active IP Right Cessation
- 1998-01-22 EP EP98901355A patent/EP0958227B1/en not_active Expired - Lifetime
-
1999
- 1999-07-16 US US09/354,910 patent/US6220395B1/en not_active Expired - Lifetime
- 1999-07-16 US US09/354,906 patent/US6199666B1/en not_active Expired - Lifetime
- 1999-07-23 US US09/358,652 patent/US6202794B1/en not_active Expired - Lifetime
- 1999-07-23 US US09/359,311 patent/US6234275B1/en not_active Expired - Lifetime
-
2000
- 2000-03-25 HK HK00101853A patent/HK1022889A1/xx not_active IP Right Cessation
- 2000-03-25 HK HK00101854A patent/HK1022890A1/xx not_active IP Right Cessation
-
2001
- 2001-04-16 US US09/834,635 patent/US6367587B2/en not_active Expired - Lifetime
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2115490A1 (de) * | 1971-03-31 | 1972-10-12 | Stemmann Ohg A | Antrieb fur Leitungs , Kabel oder Seiltrommeln od dgl |
| EP0631970A2 (en) * | 1993-06-28 | 1995-01-04 | Kone Oy | Elevator machinery |
| EP0688735A2 (en) * | 1994-06-23 | 1995-12-27 | Kone Oy | Elevator machinery and its installation |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1087710C (zh) | 电梯驱动机械 | |
| CN1208893C (zh) | 低速电机 | |
| US6202793B1 (en) | Elevator machine with counter-rotating rotors | |
| RU2071931C1 (ru) | Система противовеса | |
| CN114751285A (zh) | 双电机驱动装置牵引的电梯 | |
| CN1236421A (zh) | 用于固定式输送装置的驱动装置 | |
| CN212559039U (zh) | 一种异步无齿轮钢带曳引机 | |
| MXPA99006892A (en) | Elevator drive machine | |
| FI103104B (fi) | Henkilökuljetin ja käyttölaite |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term |
Granted publication date: 20020717 |
|
| CX01 | Expiry of patent term |