CN1121024C - 监测交通量的装置和方法 - Google Patents
监测交通量的装置和方法 Download PDFInfo
- Publication number
- CN1121024C CN1121024C CN95192481.8A CN95192481A CN1121024C CN 1121024 C CN1121024 C CN 1121024C CN 95192481 A CN95192481 A CN 95192481A CN 1121024 C CN1121024 C CN 1121024C
- Authority
- CN
- China
- Prior art keywords
- mentioned
- traffic
- image
- servo
- gray
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
Abstract
一种交通量监测装置,含有一个图象记录仪,一个交通量检测区确定装置和一个图象分析仪,上述的交通量检测区确定装置用来确定一条位于交通道路上的交通轴线上并与其大致平行而延伸的随动轴线作为交通量检测区域,上述的图象分析仪进一步处于上述随动轴线上的预定各点进行逐点鉴定,在检测出一个目标时,则产生一个识别图形,并检查在一系列后续图象中是否出现与上述识别图形相似的图形。
Description
本发明涉及一种交通量监测装置,它含有:一个用来记录同一交通道路上的一系列连续的交通车辆图象的图象记录仪;一个与上述的图象记录仪相连接并用来确定上述一系列交通图象内的交通检测区域的检测区域确定装置;一个与上述图象记录仪和检测区域确定装置结合使用的图象分析仪,用来从每次提供的图象中鉴定在上述的交通检测区域内是否出现可认为是车辆的目标。
本发明还涉及监测交通道路上出现的交通车辆的方法。
这类交通量监测装置是公知的,并由Wootton Jeffreys Consultants在市场上出售(名称为Impact)。由电视摄象机构成的图象记录仪记录交通车辆的连续的图象。在每一图象内确定要进行交通分析的检测区域。图象分析仪检查该检测区域内的图象内容以便鉴定是否出现可认为是车辆的目标。这就能够以电子方法监测交通量并鉴别例如是否发生交通堵塞。交通堵塞要通过鉴定在记录出的图象上是否出现许多可看作是车辆的目标来确定。
在公知的交通量监测装置中,每次用一个矩形作为检定区域,将该矩形加到被监测的道路的图象上。用这种方法将交通道路分成多个矩形区域。每个矩形的尺寸选择成可充分容纳一辆车。如果图象分析仪确认有一辆以上的车辆出现在上述的矩形内(这是在记录图象中通过改变该矩形的颜色例如由兰变红来表示的)就可示出交通出现问题的地方。
现有的交通量监测装置的缺点在于,由于采用多个矩形,图象分析仪不得不考虑大量的象素,对每张图要考虑多于2000个象素,这就需要相当大的计算能力。另外,为了得到可靠的系统,当交通情况急速变化时,必须获得一个接一个快速接续的车辆图象,这种变化对装置的计算能力又提出更高的要求。
现有的交通量监测装置的另一缺点是,在分析连续的图象时,不能对这些图象建立任何关系。
本发明的目的在于提供一种交通量监测装置,其中,在不降低装置可靠性的情况下,适当降低计算能力还足以进行有关图象的分析,并且,还可在连续的图象之间建立一种关系。
本发明的交通量监测装置的特征在于,上述的检测区域确定装置用来确定一条随动轴线作为交通检测区域,上述的随动轴线位于上述交通道路内的一条交通轴线内并与其大致平行延伸,上述的图象分析仪还用来对位于上述随动轴线上的预定各点进行逐点鉴定,在检测到一个目标时,立即在图象上产生一个识别图形,并从上述系列的连续交通图象上鉴定是否出现与上述识别图形相似的图形。由于选择随动轴线作为交通检测区,所考虑的象素的数目便可明显减少。由于随动轴线位于交通轴线上,较低的计算能力就足够了,但不会降低装置的可靠性。由于交通车辆主要沿上述随动轴线移动,故可保证检测的可靠性。通过再对被认为是车辆的目标加上一个识别图形,并鉴定该识别图形是否在连续的图象上重复,就能够观察车辆的移动,因为,按这种方式可在连续的图象之间建立起一种关系。
本发明装置的第一最佳实施例的特征在于,上述的交通检测区域确定装置对上述交通图象上的随动线加一条预定的线段,这就使随动轴线的确定变得简单而可靠。
本发明装置的第二个最佳实施例的特征在于,上述的图象分析仪在上述鉴定开始时测定上述象素的灰度值,并鉴别该灰度值是否超过预定的阈值,并且,确定超过阈值的灰度值的上述识别图形。特别是,当采用视频图象时,能够以简便的方式确定象素的灰度值,并可进行数字化转换。而且,可用数字化的灰度值快速进行计算,这就可快速而方便地与阈值进行比较,通过这种比较,能够可靠地确定识别图形。
有利的是,上述图象分析仪可从几个相邻象素(n>1)的平均值来确定上述的灰度值,这就能够对图象数据进行滤波。
本发明的交通量监测装置的第三个最佳实施例的特征在于,上述的图象分析仪可对上述的灰度值加一个拉普拉斯算子,并由此确定一个拉普拉斯算子,并且检查该拉普拉斯算子值是否达到阈值。上述的拉普拉斯算子值可用简单的装置以电子方式确定。
本发明的交通量监测装置的第四个最佳实施例的特征在于,上述的图象分析仪可对每个超过上述阈值的灰度值给出一个第一图象触发脉冲,该第一图象触发脉冲位于具有上述灰度值的象素周围,上述的图象分析仪还确定在上述第一图象触发脉冲内的上述识别图形。限定第一图象触发脉冲就有可能确定在第一图象触发脉冲内的识别图形,该识别图形以这种方式跨越多个象素,故能够以较高的可靠性研究相应的图形。
本发明的交通量监测装置的第五个最佳实施例的特征在于,上述的图象分析仪还可根据上述第一图象触发脉冲来确定第二图象触发脉冲,并使该第二图象触发脉冲每次沿上述随动轴线逐步移动一个预定的增量,并在上述第二图象触发脉冲的每一移动时鉴定是否出现相似的图形。这样,识别图形与第二图象触发脉冲一起移动,对相似图形的研究便限于在第二图象触发脉冲内进行。
确定第一与第二图象触发脉冲之间的关系的有利方法的特征在于,上述的图象分析仪对上述第二图象触发脉冲内的上述每次移动确定另一个识别图形,并确定该另一识别图形和上述的识别图形间的相关值,并鉴定该相关值是否超过另一个阈值。
下面通过附图详细说明本发明,附图中:
图1简单地示出本发明的交通监测装置的一个实施例;
图2说明“随动轴线”的概念;
图3a+b通过一个流程图表示本发明的交通监测装置的操作过程;
图4a+b说明“第一和第二图象触发脉冲”的概念;
图5通过流程图说明本发明的交通监测装置的工作的另一实施例;
图6示出确定随动轴线的另一种方法;
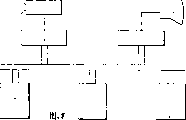
图7示出一种车辆出现的图形,其中,随动轴线与警戒线和起程线一起使用。
在所有的附图中,相同的或类似的部件用同样的标号表示。
按照本发明的一种交通量监测装置及其如图1所示的一个实施例含有一个图象记录仪1例如一架CCD-照相机。该图象记录仪1设置在道路旁以便记录出现在道路上的通行车辆;记录的图象被输入到一个模拟数字转换器2以便进行数字化处理。转换器2与以模拟形式传输数据和指令的母线3相连接。数据处理机4(例如一台微处理机)也与母线3连接,而且只读存储器5(ROM)和读/写存储器6(RAM)也与母线3连接。一个图象发生器7也与母线3连接,该图像发生器7的输出与监控器8相连接。
图象记录仪和其余的装置不一定设置在同一位置上,其余的装置最好设置在主管机构的交通监测中心里。
在数据处理机4和/或存储器5、6中存储有可对所记录的交通图象进行分析的的数据和指令。数据处理机4和存储器5、6以及母线3以这种方式构成一台图象分析仪。在更详细地说明图象分析仪的操作之前,首先解释一下“随动轴线”的概念。
图2示出代表一段交通道路9的交通图象,在该道路上有一车辆10正沿着箭头11的方向行驶。该方向就是车辆沿着它正常行驶的交通轴线之一。现在将基本上平行于交通轴线(在图2所示的实施例中就是平行于箭头11)的方向规定为随动轴线12,在图象中上述的随动轴线12的位置定在车辆出现概率最大的一段道路上,所以,例如,当随动轴线位于双行道的路段中时,则设在中间或者相对于中间稍稍偏移至右侧(对于右侧行驶车辆),在双行道或多行道的道路上(如图2所示),随动轴线12和12′例如分别位于最右侧和最左侧的路段中,并且相对于路段的中线稍微向右或向左偏移(例如偏移15%)。
随动轴线12(或12′)在安装图象记录仪时预先确定,虽然此时图象记录仪的位置是固定的。一旦图象记录仪安装完毕,图象记录仪上便会出现一根随动轴线,所述的随动轴线已事先确定好,故保持不变。但是,图象记录仪也可能改变自己的位置,例如,早上车流高峰时为第一位置,晚上车流高峰时为第二位置,为此,采用两根预定的随动轴线,并且,根据图象记录仪所取的位置,在第一和第二随动轴线之间转换。
不采用预定的随动轴线进行工作,也可根据局部交通密度沿行车方向确立随动轴线,例如,最好是在交叉路段,此时每辆有关的车在向一个或另一个方向转弯时不必沿相同的路线行驶。通过根据局部交通密度在道路上或交叉路段的不同点上沿行车方向确立有关的随动轴线,有可能使随动轴线定期地出现。除此之外,还可以避免在车辆离开预定随动轴线时干扰对车辆前进的监测。通过从最初的路段开始,然后使下一个路段相对于前一路段改变一定的角度,并验证在这一角度下是否测到车辆出现的最大概率或最高的清晰度,就可以沿行车方向确立随动轴线。上述角度的变化范围α例如可以是-15°<α<15°。这样,具有最高概率的角度也就是所选定的角度。
图6示出另一个确定随动轴线的实施例。在该实施例中,随动轴线就是一根与警戒线60交叉的起程线61。警戒线60与交通道路垂直(最好在图象的下侧)。上述警戒线60可将车流分成连续的车辆。通过例如确定灰度值(这一点在下面说明)可检测车辆是否通过警戒线。通过建立图7所示的图形,不仅可测出车辆前部通过警戒线,而且还可测出车辆的后部通过警戒线。方块“VA”表示出现的车辆,用尺寸如方块VA-3所示的方块表示车辆需要较长的时间来通过警戒线,并用这种方式指示可能出现交通堵塞。
沿大致平行于交通轴线(平行于箭头11)延伸的方向设置起程线61。只要车辆一出现,起程线61便立刻与警戒线60的中心相交。由于车辆2与警戒线相交,仪器就会跟踪出现在起程线上的特性,例如对应于要跟踪的车辆的灰度值,也就是跟踪所测出的对应于一车辆的灰度值曲线。
因此,通过随动轴线来限定要检测交通车辆出现的区域。为了进行这种检测,在随动轴线上确定许多点Xi(1≤i≤N)。这些点的灰度值将逐次测定,从而给出车辆出现的表征,灰度值最好用8位字来代表,因此便有256个数值。
但是,上述的测定并不仅限于象素Xi,为了限制实际上的干扰,从记录的图象抽出一段具有n个象素(例如1≤n≤10)的宽度的路段13。这n个象素最好在大致垂直于随动轴线的方向上选择。一辆车总是有其确定的宽度,当车辆沿随动轴线移动时,图象中在大致垂直于随动轴线的n个象素的路段上就会出现相同的灰度值。所选路段的宽度n可根据图象中的位置而改变。为了计算简便,最好在所建立的沿线图象内的同一象素线上选择n个象素。但是,也可沿随动轴线本身选择n个象素,或者根据在所记录的图象内随动轴线的弯曲情况从相对于随动轴线成β角(0≤β≤135°)的线段上选择n个象素。
如果采用警戒线60和起程线61,上述的象素当然要在起程线本身选择。起程线的长度本身就可作为1个或多个(例如3个)象素。
由图象记录仪记录的图象被数字化,并且仅考虑位于随动轴线周围含n个象数的路段中的这些象素(如前面所述)。为此,例如,将数字化的象素存储在存储器6内,并且随后仅读出属于上述路段的那些象素,并由数据处理机4进行处理。所述的选择读数例如可以由按照图象中随动轴线的位置编程的地址发生器对存储器6进行选择性地编址来实现。上述的地址发生器作为一个检测区域确定装置进行工作,以便确定图象中正确的交通量检测区。当然,也可能还有按照在存储器中进行选择出写的其他实施例。
图3a所示的流程图说明与本发明的交通量监测装置相关的象素的选择过程。下面说明流程图中的各步骤。
20.Xi=Xi+1:选择要处理的并且处于同一图象的随动轴线上的象素Xi,为此,例如采用一个作为地址发生器工作的模N计数器。该计数器连续进行计数,每次对地址加上一个增量,并以这种方式对不同的象素寻址。
21.RDXi:取出所选择的象素的灰度值Xi。
22.RD·nXi:按上述方法再取出n个象素中每一个的灰度值Xij和直接相邻的邻近值Xj(1≤j≤n)。n值可随照相机的角度和图象中Xi的位置而改变。
23.AV Xi:进行下面的数学演算: 以便确定象素Xi的灰度值和其直接相邻的邻近值的平均值
Xi,并以这种方式限制图象的干扰。但是,由于采用相对值而不是绝对值,故可不除以n+1。
24.DT Xi′:为了进一步限制图象干扰,对图象信号进行低通滤波。因此,在数字上进行下列运算:
Xi′=
Xi-1+
Xi+Xi+1式中,从与象素Xi有关的平均灰度值Xi开始,通过将其最接近的邻近值
Xi+1和Xi-1与
Xi相加,可确定其替换值Xi′。
25.DT ΔI:为了验证Xi′值是否有关,也就是是否代表车辆的出现,就要对它进行一种鉴定工作。这种鉴定工作可考虑各种情况,例如,可以简单地验证灰度值X′i是否超过预定的阈值。但是,为了考虑各种强烈影响象素的绝对灰度值的因素例如光的强度、照相机的灵敏度、和道路的潮湿等,故采用相对灰度值而不用绝对灰度值,在本实施例中,根据灰度值Xi′来计算拉普拉斯算子:
Δi=X′i-2-2X′i+X′x+2这就可以验证Xi点的灰度值是否明显不同于Xi-2点和Xi+2点的灰度值。不计算拉普拉斯算子,也可以计算与最接近的近似值X′i±P(1≤P≤3)的平均值有关的X′i的开方。
26.|Δi|>TH-LA?:在本步骤中验证拉普拉斯算子Δi的绝对值是否超过预定的门坎值TH_LA,如果该值未超过值,便跳到步骤28。
27.ST xi:当拉普拉斯算子|Δi|超过阈值TH_LA时,则Xi点便认为是相关点。确实超过TH_LA值便表示可能出现车辆。将点Xi及其相关值Xi′暂时存入存储器中。
28.Xn ?:在此步骤中验证所取的Xi点是否是N个点中的最后一点,如果不是,就考虑后续的一个点Xi+1,并且重复步骤20~28。
29.RL?:在本步骤中验证相关的点Xi是否已存入存储器内。如果未存入,便考虑图象记录仪记录的图象顺序中的后续图象。
30.RT:在相关点都已存入的情况下,启动另一种程序(如图3b所示),所述的另一种程序最好与图3a所示的程序同时执行。
当采用警戒线和起程线时,则监控起程线上的象素超越阈值的情况,一旦测出在警戒线和起程线上首次超越阈值,则还要在随后的交通图象中验证警戒线和起程线上的超越是否未停止。停止超越阈值则确证车辆的尾部已与警戒线相交,并且意味着整个车辆已被检测到。在起程线上每次出现停止超越阈值时,便会分别产生一个起始和一个终止脉冲,而得出一种如图7所示的车辆出现图形。
图4a以图解的方式示出与随动轴线上的Xi位置有关的灰度值,从该实施例看来,例如,当TH_LA=150时,在象素7、10、28、30和35处可能出现车辆,因为在这些位置上,出现拉普拉斯算子|Δi|>TH_LA的相关信息。这些点被依次测出时便可验证在后续图象中上述图形本身是否重复,验证随动轴线的方向是否移动。随动轴线移动便可确证车辆在运动,而固定不动或者缓慢移动则表示交通堵塞。
为了鉴定在后续的图象中是否出现相应的图形,对每个|Δi|>TH_LA的象素Xi规定了第一图象触发脉冲。这在步骤31 DTW1中采用向象素Xi集中的多个(例如L=6)象素来实现。处在第一触发脉冲范围内的各象素的灰度值形成一个识别图形,并将在后续的图象中继续寻找它。
这样,在图4a所示的实施例中,在象素7附近出现一个第一图象触发脉冲W1,象素4~10属于上述的第一图象触发脉冲,在同一图形内还包含有其拉普拉斯算子大于TH_LA的点7和10。再一个第一图象触发脉冲将出现在象素28、30和35附近。
为了鉴定在后续的交通图象中是否出现与第一图象触发脉冲一样的相应的图形,将有关第一图象触发脉冲的数据暂时存储到对后续图象再次完成图3a所示的步骤为止。为了将后续图象的灰度值与前面图象的灰度值Xi′区分开来,将属于后续图象的灰度值标为Yi′。确定灰度值Yi′的方式与确定Xi′的相似。图4b示出灰度值Yi′的例子。这样,象素12属于拉普拉斯算子为|Δi|>TH_LA的灰度值Yi′。
灰度值Yi′确定之后(图3b,步骤32,Yi′?),再确定第二图象触发脉冲W2(图3b,步骤33,DT W2)。该第二图象触发脉冲的大小与第一图象触发脉冲W1相同,并且最初位于与第一图象触发脉冲相同的位置上。然后使第二图象触发脉冲沿随动轴线的方向移动(SH W;图3b,步骤34),例如在随动轴线的一个位置上每次移动一个预定增量。对于第二图象触发脉冲的每次位移确定一个相关的系数(DT CF,步骤35),该相关系数CF例如可通过进行如下数学演算来确定: (式中L+1是随动轴线上位于第二图象触发脉冲之内的点数的总和)。相关系数在图形基本对应时为最小值,并随着图形间的差别的增大而增大。对于第二图象触发脉冲的每次移动,都将与第二图象触发脉冲对应位置上的相关系数暂时存储起来。
确定相关系数之后,就可验证第二图象触发脉冲是否已达到其最大位移量ΔS(SH=ΔS?,步骤36)。如果确证在两个连续的图象之间,行驶中的车辆具有一定距离,则第二图象触发脉冲的移动可限制在预定数(例如ΔS=6)的象素内。如果已经达到最大值,则将第二触发脉冲移过一个象素,并且重复步骤34和35。
如果第二图象触发脉冲已达到相对于第一图象触发脉冲的最大位移(步骤35,是)则第二图象触发脉冲的位置选择在CF具有最低值处(DTMN,步骤37)。此时确实可认为得到一种与识别图形相似的图形。随后验证最低值是否低于相关值的阈值TH_COR(图3b,步骤38,MN<TH_COR?;),如果是的(38:是),接着再计算例如车辆的移动(PT;39)。这样,上述的程序便完成了,并可对下面的图象开始新的测定。
通过确定两个图象触发脉冲位置上的差别来计算车辆的移动或速度,如果MN≥TH_COR,这就意味着未发现相应的图形。
在图4所示的实施例中,当第二图象触发脉冲WZ相对于第一图象触发脉冲移过5个位置时,第一与第二图象触发脉冲波形之间便出现重复性。因此,在随后的图象中识别图形出现在上述第一图象触发脉冲移过5个位置的位置上,这就表明,在平常的时间内确实有相关的车辆驶过。
在采用警戒线和起程线的另一实施例中,每次在按如上所述的方法(步骤38)测定了至少在起程线上(最好是警戒线)车辆的移动后,还要对该车辆再次进行测定,以便跟随道路上的车辆。因此,对于每一辆车,都从预定的起程线和警戒线开始,然后随车辆行驶路线而发展,根据在图象中测出的车辆位置,并根据车辆行驶的道路行程,再相对于车辆的中点或道路的中心使警戒线定中。然后再在确定的警戒线的中心设置起程线。按照这样的起程线和警戒线的结合,就可例如跟踪沿环形交叉道路行驶的车辆的行程。
一旦确定了警戒线与起程线的结合,也就可以在测出车辆出现后在图象内使它们位移一个预定的增量。如果灰度值的测定表明被跟踪的车辆不再出现在例如由预定的增量决定的预期的路程上时,就要对上述预定的增量进行修正。
本发明的交通量监测装置能够以可靠而简单的方法监测交通流量。当车辆固定不动时,图象中的识别图形也固定不动。于是,在图象内大致相同的位置上可看到与第一与第二图象触发脉冲的图象内容相同的图形。当在同一图象位置上测出上述相似性,或者确定车辆行驶速度基本为零时,便发出交通堵塞的报警信号。当测出的速度下降到预定的阈值以下时,也发出交通堵塞警报信号。后一情况确实表明出现了代表交通堵塞特征的车辆行驶缓慢。当车辆行驶速度再超过预定值时,交通堵塞报警信号就会中断。
本发明的装置可很好地用来测定一次交通堵塞的持续时间。为此,使一个计数器在发出交通堵塞报警信号时开始工作,当信号中断时,便停止工作。
在检测交通堵塞状况时,最好选择足够长的随动轴线,使之在交通堵塞期间对小的移动不敏感。为了不致在每次短时交通堵塞时发出不必要的信号,可以使装置只在交通堵塞保持预定的时间例如3min后才发出警报信号。
图5示出代表另一个实施例的流程图。其中某些步骤与图3a所示的程序相似,因此,这些步骤也用同样的标号表示。提出图5所示的程序是为了也用本发明的装置作为一种交通频率/密度计数器。为此,对程序加以改进,其中测出拉普拉斯算子ΔXi>TH_LA时就肯定要在后续的图象中再进行这种测定。因此,测定识别图形的平均灰度值并与定期使用的参考值相比较。当平均灰度值小于或等于代表背景灰度值并在多个(例如5个)图象中本身重复的第一值P时,便可断定无车辆出现。上述计算要特别考虑对光强度的修正。
图5所示的流程图包含如下步骤:
40.DTM:从
Xi值计算平均值M, 对随动轴线上所有的点N都确定M值。
41.SW V:当|Δi|>TH_LA时,则表示有车辆出现,并发出一个车辆出现信号V,频率计数器T1和T2(步骤53;T1=0,T2=0)回到零位,该频率计数器T1和T2的功能将在下面说明。
42.SW?:检查车辆出现信号是否已经发出。
43.T 3 =T 3 +1:如果未发出信号V,则接入计数器T3。该计数器T3用来适时地修正参考值以便考虑光的强度变化。该计数器T3只在|Δi|<TH_LA和信号V未发出的情况下投入使用,它用来计算图象的的数目。
44.T 3 =MX 3?:检查计数器T3是否指示一个最大值,该最大值例如等于10个图象。
45.RFF=M:如果计数器T3指示最大值,则用在步骤40中确定的M值代换第一参考值P。这就可以确定一个真实的背景灰度值,然后使计数器T3回零。
46.M Ref 1?:检查L=M/P值是否处于表示例如最大强度的4%的第一区Q内。
47.T 1 =T 1 +1:当LεQ时,接入计数器T1,该计数器T1在已发出的信号V后计算后续图象中|Δi|<TH_LA的数目。这种情况发生在例如当在一个图象中将由于干扰或突然的强度变化引起的目标鉴定为一辆车(|Δi|>TH_LA),而在后续图象不再发现相同的目标时。
48.T 1 =MX 1?:检查计数器T1是否指示一个最大值,该最大值是例如两个图象。
49.SWO:当T1指示一个最大值时,车辆出现信号V中断,车辆频数计数器增加一个单位。证明确实发出了信号V。再将P值调到等于M,计数器T1,T2和T3复位。
50.M Ref 2?:检查L=M/P值是否处在表示例如最大强度的30%的第二区Q′内。
51.T2=T2+1:当LεQ′时,接入计数器T2,该计数器T2的作用与计数器T1相似,但它仍然是对具有适当(大于30%)强度的图象进行计数。这种情况在例如一辆具有均匀的,不足以明显区分的颜色(例如白色)的长卡车与图象相交的时候出现。尽管强度不够,但由于绝对值|Δi|>TH_LA,实际上车辆是出现的。
52.T 2 =MX2?:检查计数器T2是否指示一个最大值,如果是,便转回到步骤49,所述最大值是例如5个图象。
Claims (16)
1.一种交通量监测装置,含有:
一个用来记录包括至少一个交通路段的同一交通道路上的一系列连续的交通图象的图象记录仪(1);
一个与上述图象记录仪相连接并用来确定在上述系列的交通图象内的交通检测区域的检测区域确定装置(4,5,6);
一个与上述图象记录仪和检测区域确定装置配合、并根据灰度值从每次提供的图象上确定在上述的交通检测区内是否出现车辆的图象分析仪(4,5,6);
其特征在于,上述的检测区域确定装置在上述交通图象上加一条作为交通检测区的随动轴线(12),在该随动轴线内划分出预定数目的点(Xi),该随动轴线位于上述交通道路(9)上的一条交通轴线内,并且平行于该交通轴线而延伸,每个上述点与所提供的交通图象中的多个象素对应,这些象素每次均在它们相应的点的范围内,该范围小于所显示的路段的宽度;上述的图象分析仪进一步鉴定检测区域内是否出现车辆,方法是通过测定在上述随动轴线的上述点的至少一个的点上述的灰度值是否超过一个预定的阈值,并且对于上述灰度值超过上述阈值的每个点给出一个识别图型,并检查在上述系列的后续交通图象内是否在至少一个点上再出现上述的识别图型。
2.根据权利要求1的交通量监测装置,其特征在于,上述的交通检测区域确定装置沿路分割上述的随动轴线,而且还从上述随动轴线的初始路段开始、计算后续的随动轴线,并修正后续的随动轴线相对于上述初始路段的方向,上述的图象分析仪对上述修正过的后续路段和上述初始路段的随动轴线进行鉴定,并选择车辆出现概率最高的后续随动轴线。
3.根据权利要求1的交通量监测装置,其特征在于,上述的交通检测区域确定装置对上述交通图象上的上述检测区域加一条警戒线,并对上述随动轴线加一条与上述警戒线相交的起程线。
4.根据权利要求3的交通量监测装置,其特征在于,上述的图象分析仪对处于上述警戒线上的象素进行鉴定,在上述的起程线和上述警戒线上的象素的灰度值超过上述值时产生一个起始脉冲,并对后续的图象进行鉴定,当上述警戒线和起程线上的象素的灰度值不再超过阈值时立即发出一个最终脉冲。
5.根据权利要求3的交通量监测装置,其特征在于,上述的图象分析仪按照上述随动轴线上所取的点(Xi)和n个相邻象素(n>1)的平均灰度值来确定上述的灰度值。
6.根据权利要求5的交通量监测装置,其特征在于,上述的图象分析仪按照上述随动轴线上所取的点(Xi)和n个相邻象素(n>1)的平均灰度值来确定上述的灰度值。
7.根据权利要求5的交通量监测装置,其特征在于,上述的图象分析仪按照处于垂直于上述随动轴线的位置上的相邻象素来确定上述的平均灰度值。
8.根据权利要求5的交通量监测装置,其特征在于,上述的图象分析仪还按照处于上述随动轴线上的相邻象素来确定上述的平均灰度值。
9.根据权利要求3的交通量监测装置,其特征在于,由上述的图象分析仪对上述的灰度值加一个拉普拉斯算子,并由此计算拉普拉斯算子,并检查上述的拉普拉斯算子的值是否达到阈值。
10.根据权利要求1的交通量监测装置,其特征在于,上述的图象分析仪对随动轴线上已给出识别图形的那些连续的点每次给出一个第一图象触发脉冲。
11.根据权利要求4的交通量监测装置,其特征在于,上述的图象分析仪在发出起始脉冲后鉴定上述的起程线上的上述识别图形。
12.根据权利要求10的交通量监测装置,其特征在于,上述的图象分析仪根据上述的第一图象触发脉冲来鉴定第二图象触发脉冲,并使上述第二图象触发脉冲每次沿上述随动轴线逐步移动一个预定的增量,并在上述第二图象触发脉冲每次移动时鉴定是否出现相似的图形。
13.根据权利要求12的交通量监测装置,其特征在于,上述的图象分析仪在触发脉冲发生上述的逐步移动时,鉴定在上述第二图象内的另一个识别图形,并从该识别图形和上述的识别图形确定一个相关的值,并验证该相关的值是否超过另一个阈值。
14.根据权利要求1的交通量监测装置,其特征在于,上述的图象分析仪在出现一个识别图形时产生一个车辆出现信号。
15.根据权利要求14的交通量监测装置,其特征在于,上述的图象分析仪带有背景灰度值补偿装置。
16.一种监测交通道路上出现的交通量的方法,该道路包括至少一个交通路段,其中,记录交通道路上一系列连续的交通图象;确定这些交通图象中的交通检测区域;从记录的交通图象中鉴定在上述的交通检测区域内是否出现可认为是车辆的目标,其特征在于,在交通图象中对上述交通检测区域加一条随动轴线,在该随动轴线内划分出预定数目的多个点(Xi),该随动轴线位于上述交通道路的交通轴线内并平行于该交通轴线而延伸,每个上述点与所提供的交通图象中的多个相素对应,这些象素每次均在它们的相应的点的范围内,该范围小于所显示的路段的宽度;对上述随动轴线的各点逐点进行上述的鉴定,方法是通过测定上述各点的灰度值是否超过一个预定的阈值,一旦出现灰度值超过预定的阈值,便在这些点上上产生识别图形,上述测定还包括检查在后续的交通图象内,是否在至少一点上再现上述识别图型。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| BE9400369 | 1994-04-08 | ||
| BE9400369A BE1008236A3 (nl) | 1994-04-08 | 1994-04-08 | Verkeersbewakingsinrichting. |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1145127A CN1145127A (zh) | 1997-03-12 |
| CN1121024C true CN1121024C (zh) | 2003-09-10 |
Family
ID=3888088
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN95192481.8A Expired - Lifetime CN1121024C (zh) | 1994-04-08 | 1995-04-07 | 监测交通量的装置和方法 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US5912634A (zh) |
| EP (1) | EP0755552B1 (zh) |
| JP (1) | JPH09511600A (zh) |
| CN (1) | CN1121024C (zh) |
| AT (1) | ATE176073T1 (zh) |
| AU (1) | AU699198B2 (zh) |
| BE (1) | BE1008236A3 (zh) |
| DE (1) | DE69507463T2 (zh) |
| ES (1) | ES2130608T3 (zh) |
| WO (1) | WO1995027962A1 (zh) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6275171B1 (en) * | 1999-04-30 | 2001-08-14 | Esco Electronics, Inc. | Rangefinder type non-imaging traffic sensor |
| FR2842637B1 (fr) * | 2002-07-22 | 2004-10-01 | Citilog | Procede pour detecter un incident ou analogue sur une portion de voie |
| DE10239675B4 (de) * | 2002-08-26 | 2009-10-15 | Technische Universität Dresden | Verfahren zur Ermittlung von Verkehrszustandsgrößen |
| US20040167861A1 (en) * | 2003-02-21 | 2004-08-26 | Hedley Jay E. | Electronic toll management |
| US7747041B2 (en) * | 2003-09-24 | 2010-06-29 | Brigham Young University | Automated estimation of average stopped delay at signalized intersections |
| EP1817689B1 (en) * | 2004-11-18 | 2014-03-12 | Gentex Corporation | Improved image acquisition and processing systems for vehicle equipment control |
| US7920959B1 (en) | 2005-05-01 | 2011-04-05 | Christopher Reed Williams | Method and apparatus for estimating the velocity vector of multiple vehicles on non-level and curved roads using a single camera |
| CN100446015C (zh) * | 2005-06-03 | 2008-12-24 | 同济大学 | 一种可用于地面道路网交通状况测定的方法和系统 |
| AU2006257287B2 (en) * | 2005-06-10 | 2012-12-06 | Accenture Global Services Limited | Electronic vehicle indentification |
| CN100435160C (zh) * | 2005-08-05 | 2008-11-19 | 同济大学 | 一种用于交通信息实时采集的视频图像处理方法及系统 |
| AU2009243492B2 (en) * | 2008-12-19 | 2014-12-11 | Intelematics Australia Pty Ltd | Green cycle filter for traffic data |
| DE102012102600B3 (de) * | 2012-03-26 | 2013-08-14 | Jenoptik Robot Gmbh | Verfahren zur Verifizierung der Ausrichtung eines Verkehrsüberwachungsgerätes |
| CN102682602B (zh) * | 2012-05-15 | 2014-05-07 | 华南理工大学 | 一种基于视频技术的道路交通参数采集方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4847772A (en) * | 1987-02-17 | 1989-07-11 | Regents Of The University Of Minnesota | Vehicle detection through image processing for traffic surveillance and control |
| US5161107A (en) * | 1990-10-25 | 1992-11-03 | Mestech Creation Corporation | Traffic surveillance system |
| US5296852A (en) * | 1991-02-27 | 1994-03-22 | Rathi Rajendra P | Method and apparatus for monitoring traffic flow |
| US5509082A (en) * | 1991-05-30 | 1996-04-16 | Matsushita Electric Industrial Co., Ltd. | Vehicle movement measuring apparatus |
| JP2917661B2 (ja) * | 1992-04-28 | 1999-07-12 | 住友電気工業株式会社 | 交通流計測処理方法及び装置 |
| US5396429A (en) * | 1992-06-30 | 1995-03-07 | Hanchett; Byron L. | Traffic condition information system |
| JP2816919B2 (ja) * | 1992-11-05 | 1998-10-27 | 松下電器産業株式会社 | 空間平均速度および交通量推定方法、地点交通信号制御方法、交通量推定・交通信号制御機制御装置 |
| JP3468428B2 (ja) * | 1993-03-24 | 2003-11-17 | 富士重工業株式会社 | 車輌用距離検出装置 |
-
1994
- 1994-04-08 BE BE9400369A patent/BE1008236A3/nl not_active IP Right Cessation
-
1995
- 1995-04-07 CN CN95192481.8A patent/CN1121024C/zh not_active Expired - Lifetime
- 1995-04-07 AU AU22501/95A patent/AU699198B2/en not_active Ceased
- 1995-04-07 AT AT95915707T patent/ATE176073T1/de active
- 1995-04-07 ES ES95915707T patent/ES2130608T3/es not_active Expired - Lifetime
- 1995-04-07 WO PCT/BE1995/000032 patent/WO1995027962A1/en active IP Right Grant
- 1995-04-07 DE DE69507463T patent/DE69507463T2/de not_active Expired - Fee Related
- 1995-04-07 EP EP95915707A patent/EP0755552B1/en not_active Expired - Lifetime
- 1995-04-07 JP JP7525984A patent/JPH09511600A/ja active Pending
- 1995-04-07 US US08/714,173 patent/US5912634A/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| AU2250195A (en) | 1995-10-30 |
| WO1995027962A1 (en) | 1995-10-19 |
| JPH09511600A (ja) | 1997-11-18 |
| ATE176073T1 (de) | 1999-02-15 |
| DE69507463D1 (de) | 1999-03-04 |
| CN1145127A (zh) | 1997-03-12 |
| EP0755552A1 (en) | 1997-01-29 |
| BE1008236A3 (nl) | 1996-02-20 |
| AU699198B2 (en) | 1998-11-26 |
| US5912634A (en) | 1999-06-15 |
| DE69507463T2 (de) | 1999-09-16 |
| ES2130608T3 (es) | 1999-07-01 |
| EP0755552B1 (en) | 1999-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1121024C (zh) | 监测交通量的装置和方法 | |
| US20240069172A1 (en) | Method of Providing Interference Reduction and a Dynamic Region of Interest in a LIDAR System | |
| US9047518B2 (en) | Method for the detection and tracking of lane markings | |
| EP2057581B1 (de) | Erkennung und kategorisierung von lichtpunkten mit einer kamera in einer fahrzeugumgebung | |
| JP4426535B2 (ja) | 車両の周辺監視装置 | |
| JP3947193B2 (ja) | 車両のコース予測方法及びその装置 | |
| EP1575014B1 (en) | Method and apparatus for processing pictures of vehicles | |
| CN110532916A (zh) | 一种运动轨迹确定方法及装置 | |
| WO2007033627A1 (de) | Verfahren zur erkennung von fahrspurmarkierungen | |
| CN107097794A (zh) | 道路车道线的侦测系统及其方法 | |
| CN110738081A (zh) | 异常路况检测方法及装置 | |
| CN108573244B (zh) | 一种车辆检测方法、装置及系统 | |
| CN113127466A (zh) | 一种车辆轨迹数据预处理方法及计算机存储介质 | |
| CN112562406B (zh) | 一种越线行驶的识别方法及装置 | |
| CN109344829A (zh) | 一种高速铁路列车的车号识别方法及装置 | |
| CN116863711A (zh) | 基于公路监控的车道流量检测方法、装置、设备及介质 | |
| CN111724607A (zh) | 转向灯使用检测方法、装置、计算机设备和存储介质 | |
| DE102005044981A1 (de) | Verfahren zur Erkennung von Fahrspurmarkierungen | |
| JP3399104B2 (ja) | 先行車検出装置及び接近警報装置 | |
| CN113378628B (zh) | 一种道路障碍物区域检测方法 | |
| CN114675272A (zh) | 一种雷达监测优化方法、装置和车辆 | |
| JP4972596B2 (ja) | 交通流計測装置 | |
| CN109389643B (zh) | 车位主方向判断方法、系统以及存储介质 | |
| JP3517999B2 (ja) | 車両認識装置 | |
| CN116659540B (zh) | 一种在自动驾驶过程中的交通护栏识别方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CX01 | Expiry of patent term |
Expiration termination date: 20150407 Granted publication date: 20030910 |