CN1129902C - 盘片装置 - Google Patents
盘片装置 Download PDFInfo
- Publication number
- CN1129902C CN1129902C CN98800264A CN98800264A CN1129902C CN 1129902 C CN1129902 C CN 1129902C CN 98800264 A CN98800264 A CN 98800264A CN 98800264 A CN98800264 A CN 98800264A CN 1129902 C CN1129902 C CN 1129902C
- Authority
- CN
- China
- Prior art keywords
- disc
- roller
- storage sheet
- expression
- disk apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






































































Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/02—Details
- G11B17/04—Feeding or guiding single record carrier to or from transducer unit
- G11B17/05—Feeding or guiding single record carrier to or from transducer unit specially adapted for discs not contained within cartridges
- G11B17/051—Direct insertion, i.e. without external loading means
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/02—Details
- G11B17/021—Selecting or spacing of record carriers for introducing the heads
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/02—Details
- G11B17/04—Feeding or guiding single record carrier to or from transducer unit
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/02—Details
- G11B17/04—Feeding or guiding single record carrier to or from transducer unit
- G11B17/0401—Details
- G11B17/0402—Servo control
- G11B17/0404—Servo control with parallel drive rollers
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/22—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records
- G11B17/221—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records with movable magazine
- G11B17/223—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records with movable magazine in a vertical direction
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/22—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records
- G11B17/26—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records the magazine having a cylindrical shape with vertical axis
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/22—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records
- G11B17/30—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records wherein the playing unit is moved according to the location of the selected record
Abstract
一种可以防止损伤盘片的盘片装置。设有:设于框架(100)的盘片插入口的上部盘片滚子(201)以及下部盘片滚子(202)、调节上部盘片滚子(201)和下部盘片滚子(202)之间的间隙(d2、d3、d4)大小的滚子开口凸轮板(203)。
Description
技术领域
本发明涉及盘片装置,尤其涉及在插入或排出盘片时夹持盘片、再现盘片或更换盘片时使夹持盘片的两边的滚子部移动,以此防止盘片受损伤的盘片装置。
背景技术
图106是现有的可选择性地使一般的多个盘片动作的盘片装置主要部分的侧视图,图107表示主要部分的剖视图。
在图106、图107中,1是存放交换用盘片的托架,2是盘片旋转驱动部,盘片旋转驱动部2包括:盘片旋转用电动机3;设置在该盘片旋转用电动机3的轴上的盘片夹紧轮毂13;盘片夹持部4;设置在托架1内的、将由通过驱动装置(未图示)驱动的驱动杆5送出的盘片8送出到盘片旋转驱动部2的盘片滚子6;在支承盘片旋转驱动部2的框体7上固定的驱动轴9;利用驱动装置向图中A方向进行动作的倾斜板凸轮10和上下导向板11。
在该盘片装置中,在找出存放于托架1的多个盘片8时,驱动轴9、倾斜板凸轮10、上下导向板11分别连动,使盘片旋转驱动部2沿图中B方向移动,在托架1内的所需盘片的位置进行定位。
如此,因现有的盘片装置在平面区域内使存放于托架1内的盘片和在盘片旋转驱动部2一侧旋转的盘片构成完全独立的状态,故产生了盘片装置的长度、即D尺寸变大的问题。
因此,为解决上述问题,提出了例如日本发明专利公开1988年第200354号公报所揭示的结构,图108是从主要部分侧面表示剖视的主要部分的侧剖视图,图109是从主要部分上面表示剖视的主要部分的剖视图。
在图108、图109中,19是存放交换用盘片的托架,21是盘片旋转用电动机,22是在盘片旋转用电动机21的轴上设置的盘片夹紧轮毂,23是盘片夹持部。
26是将由通过驱动装置(未图示)驱动的驱动杆24送出的盘片25送出到盘片旋转驱动部的盘片滚子,27是与盘片滚子26相对的从动滚子。
另外,32是一对倾斜板凸轮,其作用是与托架19内的多个托盘31卡合,在相对于盘片旋转驱动部20、沿盘片的面方向移动时,在由托架移动装置(未图示)选择的盘片25的旋转轴心方向上至少设置超过盘片厚度的空隙E。
这里,盘片旋转驱动部20包括、盘片旋转用电动机21、盘片夹紧轮毂22、盘片夹持部23、驱动杆24、盘片25、盘片滚子26、从动滚子27及倾斜板凸轮32。
下面说明工作原理。
在找出存放于托架19内的多个盘片25中任一片时,通过驱动装置使托架19向图中箭头F方向移动,在托架19内的所需盘片的位置进行定位。
并且,托架19内的驱动杆24产生动作,盘片25沿托架内的盘片导向部35滑动,在盘片旋转驱动部20的盘片滚子26与从动滚子27之间咬入盘片25的前端,在利用盘片滚子26的转动而搬运到盘片夹持部23及盘片旋转用电动机21的轴上所设置的盘片夹紧轮毂22的位置后,由盘片检测装置(未图示)确认盘片25的夹紧位置,通过驱动装置,使盘片夹持部23及盘片滚子26、从动侧滚子27向盘片夹紧轮毂22方向移动,从而夹紧盘片25。
另外,在从动侧滚子27向盘片夹紧轮毂22方向移动的同时,通过驱动装置使设置于盘片旋转驱动部20上的一对倾斜板凸轮32向托架19侧移动,使托盘31倾斜成如图108所示那样适当的间隙E。
因现有的盘片装置构成如上所述的结构,故存在着如下的问题:因需要托架盒而不能1片片选择性地插入、取下盘片,及使盘片装置大型化。
另外,由于现有的盘片装置使用活络型的托架盒,故技术上难以对将盘片存放在盘片装置内的各个存放栅板进行分解,在盘片再现时获得再现的盘片与对向的盘片之间的间隙时,因只能一端开口而使间隙增大的情况下,需在装置内设置其大小一样的空间,从而也存在着盘片装置大型化的问题。
此外,由于现有的盘片装置使用活络型的托架盒,故存在着如下的问题:在盘片装置内很难对存放有盘片的各个存放栅板分别进行带倾斜度的分开。
另外,为确保盘片装置内的空间,存在着盘片装置大型化的问题。
本发明的目的在于,为解决所述问题而提供一种无需可拆卸的托架而存放多个盘片作各种动作的、即对各个盘片有选择性地进行插入、排出或再现等动作且可小型化的盘片装置。
本发明的另一目的在于,提供一种即使将盘片存放位置与盘片再现位置结构不相同也能节省空间的盘片装置。
本发明的又一目的在于,提供一种在插入或排出盘片时夹持盘片、且当再现盘片或交换盘片时通过使夹持盘片的双方的滚子部移动而能防止给盘片带来损伤的装置。
发明的公开
本发明的盘片装置具有:隔着运送盘片的盘片运送路径相对设置且夹持盘片运送路径内的盘片两面进行运送的第1、第2盘片滚子、对盘片进行驱动的盘片驱动装置、当该盘片驱动装置工作时为了在第1盘片滚子与对向盘片的面之间形成间隙而使第1盘片滚子相对盘片面向大致垂直方向移动的第1滚子移动装置、以及当盘片驱动装置工作时为了在第2盘片滚子与对向盘片的面之间形成间隙而使第2盘片滚子相对盘片面向大致垂直方向移动的第2滚子移动装置。构成第1及第2滚子移动装置的构件中的凸轮构件与第1和第2盘片滚子抵接,调节两个盘片滚子间的间隙大小。这样即使在第1和第2盘片滚子之间的间隙内插入盘片,也可防止盘片受损伤,可提高盘片装置的可靠性。
另外,第1、第2滚子移动装置使第1、第2盘片滚子分别相互相对地移动。这样,可以准确地进行盘片的插入或排出,可提高盘片装置的可靠性。
另外,在盘片驱动装置的动作状态切换成非动作状态时,第1、第2滚子移动装置使第1、第2盘片滚子分别移动到盘片驱动装置动作前的设定位置。这样,在插入/排出盘片的指令发出后,可在瞬间开始插入/排出动作,更加方便了使用者。
还有,当把已插入装置内部的盘片向上述装置外部排出时,第1、第2滚子移动装置分别使第1、第2盘片滚子移动,以使它们分别与盘片两个面中的一面抵接,并用第1、第2盘片滚子夹持盘片。这样,不仅可准确地进行盘片的排出动作,而且可以防止对盘片的损伤,提高盘片装置的可靠性。
附图的简单说明
图1是表示实施例1的盘片装置大致结构的立体图。
图2是表示图1所示的盘片装置的盘片装载机构主要部分的立体图。
图3是表示图1所示的盘片装置的盘片装载机构主要部分的立体图。
图4是说明图1所示的盘片装置的盘片装载机构主要部分与盘片插入时之关系的说明图。
图5是说明图1所示的盘片装置的盘片装载机构主要部分与盘片插入时之关系的说明图。
图6是表示图1所示的盘片装置的盘片装载机构主要部分的正面结构及动作状态的状态图。
图7是表示图1所示的盘片装置的盘片装载机构主要部分的上面结构及动作状态的状态图。
图8是表示图1所示的盘片装置的盘片装载机构主要部分的侧面上部结构及动作状态的状态图。
图9是表示图1所示的盘片装置的盘片装载机构主要部分的侧面下部结构及动作状态的状态图。
图10是表示图1所示盘片装置的盘片夹持部的结构俯视图及主视剖视图。
图11是表示图10所示的盘片装置的盘片夹持部主要部分的侧面动作状态的状态图。
图12是表示图10所示的盘片装置的盘片夹持部的动作状态的状态图及表示盘片夹持部主要部分的侧面动作状态的状态图。
图13是表示图10所示的盘片装置的盘片夹持部的动作状态的状态图及表示盘片夹持部主要部分的侧面动作状态的状态图。
图14是表示图10所示的盘片装置的盘片夹持部的动作状态的状态图及表示盘片夹持部主要部分的侧面动作状态的状态图。
图15是表示图10所示的盘片装置的盘片夹持部的动作状态的状态图及表示盘片夹持部主要部分的侧面动作状态的状态图。
图16是表示图10所示的盘片装置的盘片夹持部主要部分的动作状态的状态图。
图17是表示图1所示的盘片装置的盘片再现部主要部分结构的俯视图及侧视剖视图。
图18是表示图17所示的盘片再现部主要部分移动机构的结构俯视图及主视剖视图。
图19是表示将图17所示的盘片再现部主要部分安装在图18所示机构上的俯视图及主视剖视图。
图20是表示图19所示的盘片装置主要部分动作状态的侧视状态图。
图21是表示图17所示的盘片再现部主要部分移动机构的动作状态的俯视图及主视剖视图。
图22是表示将图17所示的盘片再现部主要部分安装在图21所示动作状态的机构上的俯视图及主视剖视图。
图23是表示图17所示的盘片再现部主要部分移动机构的动作状态的俯视图及主视剖视图。
图24是表示将图17所示的盘片再现部主要部分安装在图23所示动作状态的机构上的俯视图及主视剖视图。
图25是表示图19所示的盘片装置主要部分的动作状态的侧视状态图。
图26是表示图19所示的盘片装置主要部分的动作状态的侧视状态图。
图27是表示图19所示的盘片装置主要部分的动作状态的侧视状态图。
图28是表示图19所示的盘片装置主要部分的动作状态的侧视状态图。
图29是表示图1所示的盘片装置的盘片存放机构主要部分的结构分解图。
图30是表示将图29所示的盘片存放机构主要部分装配后状态的的立体图。
图31是表示图30所示的盘片存放机构主要部分动作的说明图。
图32是表示图30所示的盘片存放机构主要部分动作的说明图。
图33是说明图1所示的盘片装置主要部分动作概要的说明图。
图34是说明图1所示的盘片装置主要部分动作概要的说明图。
图35是说明图1所示的盘片装置主要部分动作概要的说明图。
图36是表示图1所示的盘片装置的盘片存放机构主要部分结构的俯视图。
图37是表示图1所示的盘片装置的盘片存放机构主要部分结构的俯视图及分解图。
图38是图37所示的盘片存放机构主要部分的分解图。
图39是说明图38所示的盘片存放机构主要部分动作的说明图。
图40是说明图36~图38所示的盘片存放机构主要部分动作状态的说明图。
图41是说明图36~图38所示的盘片存放机构主要部分动作状态的说明图。
图42是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
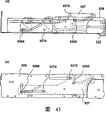
图43是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图44是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图45是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图46是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图47是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图48是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图49是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图50是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图51是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图52是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
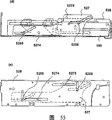
图53是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图54是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图55是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图56是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图57是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图58是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图59是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图60是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图61是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图62是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图63是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图64是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图65是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图66是表示图36~图38所示的盘片存放机构主要部分动作状态的状态图。
图67是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图68是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图69是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图70是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图71是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图72是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图73是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图74是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图75是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图76是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图77是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图78是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图79是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图80是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图81是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图82是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图83是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图84是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图85是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图86是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图87是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图88是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图89是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图90是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图91是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图92是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图93是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图94是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图95是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图96是表示图1所示的盘片装置整体基本动作的俯视图及侧视剖视图。
图97是表示实施例2的盘片装置的盘片装载机构主要部分的正面结构及动作状态的状态图。
图98是表示图97所示的盘片装置的盘片装载机构主要部分的上面结构及动作状态的状态图。
图99是表示图97所示的盘片装置的盘片装载机构主要部分的侧面上部结构及动作状态的状态图。
图100是表示实施例2的盘片装置的盘片装载机构主要部分的正面结构及动作状态的状态图。
图101是表示图100所示的盘片装置的盘片装载机构主要部分的上面结构及动作状态的状态图。
图102是表示图100所示的盘片装置的盘片装载机构主要部分的侧面下部结构及动作状态的状态图。
图103是表示实施例3的盘片装置的盘片装载机构主要部分的正面结构及动作状态的状态图。
图104是表示图103所示的盘片装置的盘片装载机构主要部分的侧面下部结构及动作状态的状态图。
图105是表示图103所示的盘片装置的盘片装载机构主要部分的侧面结构及动作状态的状态图。
图106是表示现有的盘片装置的示意结构图。
图107是表示现有的盘片装置侧面的侧剖视图。
图108是表示现有的盘片装置上部的上部剖视图。
图109是表示现有的盘片装置侧面的侧剖视图。
实施发明的最佳形态
实施形态1
现结合附图进一步详细说明本发明。
图1是表示实施例1的盘片装置内部大致结构的立体图。
该盘片装置,可从各个机构中分成3大部分。
第1部分是当插入盘片时将其送入或送出到规定位置的盘片送出入机构,第2部分是设置存放盘片的多个存放部、盘片再现等时在各存放部间设置规定间隙、将各存放部配置在规定位置的盘片存放机构,第3部分是盘片再现时在规定位置对其予以保持、再现的盘片保持再现机构。
这里,对该盘片装置的基本动作进行说明。
首先,当盘片送出入机构将盘片插入装置内时,盘片存放机构进行动作,且在指定或自动地使盘片存放部移动并配置成与盘片送出入机构相邻接的状态后,将盘片存放于盘片存放部。此时,因盘片存放部与盘片送出入机构相邻接,故仅用盘片送出入机构动作的力将其存放在盘片存放部中。
其次,在将盘片存放于盘片存放机构后,盘片存放部就移动到原来被配置的位置待机,直到接受再现等动作指令,或者自动过渡到下个动作。
另外,一旦接受再现等动作指令,则通过盘片保持机构及盘片存放机构相互动作,盘片存放机构的盘片存放部就对盘片进行保持,且使盘片移动到规定的动作位置,即再现等的盘片动作位置,从而开始动作。
接着,在对盘片进行动作时,一旦使盘片动作结束,则盘片保持再现机构及盘片存放机构从盘片动作位置对盘片进行保持并使其存放于盘片存放机构中,作待机,直到接受再现等动作指令,或者自动过渡到下个动作。
另外,一旦盘片接受排出指令,则盘片存放机构就将自动选择或指定的盘片存放部移动到与盘片送出入机构相邻接的位置,使由盘片存放部所承载的盘片向盘片装置外排出。
该盘片装置的基本动作如上所述,下面,先说明盘片装置整体的结构,接着详细说明各自的3个机构。
[1.盘片装置的整体结构]
在图1中,100是盘片装置的框体,101是将盘片插入盘片装置内、即插入框体100内或将其排出的盘片插入口,102是在盘片插入口101与储片部501~504(后述)之间搬运盘片的盘片搬运路径。
另外,200是将盘片插入框体100内或将其排出的盘片装载部,该盘片装载部200包括在与盘片标签面对面的位置所设置的上部盘片滚子201和夹持盘片并在与上部盘片滚子201相对的位置所设置的下部盘片滚子202等。
300是盘片夹持部,它在盘片装载部200装入盘片、一旦将盘片存放于盘片存放机构(后述)后,根据来自操作部(未图示)的再现指令,从配置于再现动作位置处的盘片R的上方向盘片再现部400(后述)进行按压并予以保持。
该盘片夹持部300包括:对盘片予以按压保持的夹持器301;为使盘片移动到再现动作位置而向C或D方向作转动移动并使夹持器301与盘片抵接的夹持器臂302;以及对夹持器301的抓捏部3012予以保持且向上方提起的提升臂303等。
400是使盘片旋转驱动、读出盘片所记忆的信息的盘片再现部,该盘片再现部400包括:载放盘片的部位所设置的盘片回转台401;对载放在该盘片回转台401上的盘片予以旋转驱动的盘片驱动电动机402;以及读出盘片所记忆的信息的拾波器部403等。
500是将插入盘片装载部200的盘片予以存放的盘片存放机构,该盘片存放机构500包括4个储片部501~504(以下称作第1储片部501、第2储片部502、第3储片部503及第4储片部504),可与从插入口101插入的盘片的面大致平行地存放多个、即在本实施例1中存放4个盘片。
整体的结构如上所述,下面详细说明每个机构。
[2.盘片送出入机构]
在图1、图2中,包含盘片装载部200的盘片送出入机构,当从插入口101插入盘片R时,上部盘片滚子201向A方向即逆时针旋转,下部盘片滚子202向B方向即顺时针旋转,使盘片R存放在与盘片装载部200邻接的规定的储片部中,例如第1储片部501中。
如上述的图1、图2所示,说明了上部盘片滚子201与下部盘片滚子202一起转动的情况,不言而喻,也可仅仅单侧转动,另一个做成仅与盘片R的面抵接并滑动,不作转动的结构。
图2是表示图1所示的盘片装置的上部盘片滚子201与下部盘片滚子202夹持盘片后状态的说明图,图3是表示图1所示的盘片装置的上部盘片滚子201与下部盘片滚子202对盘片的夹持予以放开后状态的说明图。
用所述图2、图3来说明盘片送出入机构。
图2表示搬运盘片时上部盘片滚子201与下部滚子202的位置关系,将两滚子的间隙设为D1,则夹持盘片R时的D1为盘片厚度的1.2mm。
此时,实际上与盘片R的位置关系是,图4表示夹持盘片R时状态,图5表示盘片R放开状态。
接着,用图6~图9来详细说明盘片装载部200的动作机构的结构,再详细说明上部盘片滚子201的动作及下部盘片滚子202的动作。
这里,图6是表示盘片装载部200的正面部分结构及动作状态的主要部分的主视图,图7是表示盘片装载部200的上面结构及动作状态的主要部分的俯视图,图8是表示上部盘片滚子201的侧面结构及动作状态的上部盘片滚子侧视图,图9是表示下部盘片滚子202的侧面结构及动作状态的下部盘片滚子侧视图,图8、图9表示本实施例1中的左侧面。
另外,图6~图9分别表示(a)~(d)的4个图,(a)是未插入盘片R状态,(b)是盘片R的插入搬运动作状态,即夹持盘片R状态,(c)是例如在使盘片R移动到再现位置时、将上部盘片滚子201与下部盘片滚子202的间隙增大且将盘片R配置在其间隙内的两滚子的间隙为最大的中途状态,(d)表示对两滚子成最大间隙的盘片R进行再现动作的状态,并表示两滚子的间隙从最小到最大的过程及从插入盘片R到进行再现的过程,按(a)→(b)→(c)→(d)顺序进行动作。
203是对上部盘片滚子201与下部盘片滚子202的间隙大小进行调节的滚子开启凸轮板,该滚子开启凸轮板203由本体2031和凸轮部2032形成。
这里,在滚子开启凸轮板203的本体2031上,在上部或下部盘片滚子201、202侧的一端,设有以设在框体100内的底座销(未图示)为滑动轴并沿A或B方向滑动的滑动孔20311,在另一端设有使连杆部209的销2092(分别后述)沿C或D方向滑动的滑动孔20312。
另外,在滚子开启凸轮板203的凸轮部2032上,形成有使上部滚子臂204的一部分上设置的销2041(分别后述)滑动的具有倾斜的滑动孔20321和为使形成于下部盘片滚子202的顶端的销2022与凸轮部2032的周缘部的一部分抵接的倾斜部20322。
204是上部滚子臂,其对上部盘片滚子201的一端2011予以保持、并形成有使其在滚子开启凸轮板203的凸轮部2032的滑动孔20321内滑动的销2041和与设于框体100内的底座销(未图示)嵌合的支轴孔2042。
另外,此场合,上部盘片滚子201的一端2011与销2041是分别形成的,但也可用一端2011来代用销2041。
此外,205是下部滚子臂,在其一端形成了对在下部盘片滚子202的顶端所形成的轴构件的延长部2022的一部分予以保持的下部滚子保持部2051,在另一端形成了与设于框体100内的底座销(未图示)嵌合的支轴孔2052。
又,206是开启连杆,在其一端形成了与滑动孔20312嵌合的销2061和与设于框体100内的底座销(未图示)嵌合的支轴孔2062,及在另一端的一部分周缘部形成了与滑块304(后述)抵接的滑块抵接部2063。
以下说明上述的盘片送出入机构的动作。
首先,如图6~图9(a)所示,在未插入盘片R时,滑块304位于插入口101侧,即B侧,开启连杆206的销2061位于D侧。
此时,因上部滚子臂204的销2041如图8所示那样相对滑动孔20321位于左端,故上部盘片滚子201的位置不会变化,上部滚子臂204的位置就不变化。
另外,由于滚子开启凸轮板203的位置未变化,故下部滚子保持部2051所保持的下部盘片滚子202的延长部2022利用弹性构件(未图示)而始终向上部盘片滚子201侧施力,因此,与最接近于倾斜部20322的上部盘片滚子的部位抵接,该位置成为下部盘片滚子202的位置。
另外,此时的上部盘片滚子201与下部盘片滚子202的最接近的间隙比盘片R的一般厚度(例如1.2mm)稍薄(例如0.5mm),从而消除盘片厚度的误差并充分发挥夹持盘片时的夹持力,防止盘片脱离滚子。
其次,当从上述动作状态开始将盘片R插入插入口101后,就成为如图6~图9(b)所示的动作状态,因上部盘片滚子201与下部盘片滚子202的最接近的间隙如上所述,比盘片的厚度薄,故若利用滚子的旋转等来牵拉盘片,间隙就开启,直到盘片的厚度。
除该动作外,其余与(a)相同,故省略说明。
再次,当图6~图9(b)所示的动作之后,一旦将插入后的盘片R存放于储片部、由操作部(未图示)操作盘片R的再现指令时,就进行如图6~图9(c)所示的动作。
该图6~图9(c)所示的图,是表示盘片再现部400移动到盘片再现位置时的滚子的打开动作中途状态的图,是为使盘片再现部400移动而将连接的滑块304向A方向移动的中途状态。
在滑块304上形成有与设在开启连杆206上的抵接部2063抵接的抵接部3041、3042,如图7(c)所示,因连杆部206根据滑块304向A方向的移动而以与支轴孔2062嵌合的支轴(未图示)为中心向C方向作旋转,故连杆部206的销2061在滚子开启凸轮板203的滑动孔20312内向C方向旋转。
另外,因滚子开启凸轮板203只向A或B方向移动,故在开启连杆206向C方向旋转移动时,只能向滚子开启凸轮板203传递A方向的移动指令而向A方向移动。
另外,如上所述,由于滚子开启凸轮板203向A方向移动,即如图8(c)所示向E方向移动,故上部滚子臂204的销2041在滚子开启凸轮板203的滑动部20321内向F方向滑动,因该滑动部20321随着向F方向移动而使上部滚子臂204向G方向移动,故使上部滚子臂204、即该上部滚子臂204所保持的上部盘片滚子201向G方向移动。
又,如上所述,由于滚子开启凸轮板203 向A方向移动,即如图9(c)所示向I方向移动,故下部滚子臂205就受到下部盘片滚子202的延长部2022的周缘部向K方向按压,换言之,因以与支轴孔2052嵌合的支轴(未图示)为中心向K方向旋转,故随着滚子开启凸轮板203的倾斜部20322而向K方向旋转、下部滚子臂205所保持的下部盘片滚子202就向K方向移动。
因此,可根据滑块304的动作而获得图6(c)所示那样的d3间隙。
最后,当滑块304从上述的图6~图9(c)向图7所示的A方向移动时,盘片R再现时的动作状态就如图6~图9(d)所示,由于滑块304如图7所示那样再向A方向移动,故开启连杆206从(c)状态再向C方向旋转,使滚子开启凸轮板203再向A方向移动。
另外,如图所示,开启连杆206的滑块抵接部2063与滑块304的抵接部处于平行的状态,当仅仅滑块304向A方向移动中途之时,开启连杆206不能再向C方向旋转,并且即使产生欲把开启连杆206向D方向回复的力,滑块304的向B方向回复的力也不起作用。
因此,滚子开启凸轮板203被保持在沿A方向来去的位置上。
此时,如图8所示,上部滚子臂204的销2041滑动到滚子开启凸轮板203的滑动孔20321的F侧终端附近,上部盘片滚子201再向G方向移动并被保持。另外,如图7所示,由于滑块304再向A方向移动,故如图9所示那样滚子开启凸轮板203的倾斜部20322就向K方向按压,以移动下部盘片滚子202的延长部2022,直到J方向的终端部,下部盘片滚子202再向K方向移动,并在此处被保持。
由于盘片送出入机构构成如上所述那样,故能进行图6所示的一系列的动作。
即,若将图6(a)所示的未插入盘片场合的上部盘片滚子201与下部盘片滚子202的间隙设为d1,则如图6(b)所示,在插入盘片时盘片的厚度(厚度为d2)成为间隙d2,如图6(c)所示,在开始准备再现盘片时,滚子开启凸轮板203向盘片R的送入方向移动,为增大间隙,上部盘片滚子201开始向上方移动,下部盘片滚子202开始向下方移动(间隙为d3),当从图6(c)的再现准备到开始再现动作时,如图6(d)所示可进一步获得间隙d4。
此时的间隙大小成为:d1<d2<d3<d4。
另外,在停止盘片R再现、排出盘片的情况下,即,当对上述的动作进行相反动作时,按图6~图9(d)→(c)→(b)→(a)的顺序进行动作。
[3.盘片保持再现机构]
盘片保持再现机构,分成3大部分:从上方对盘片进行按压并保持的盘片夹持部300;在进行盘片再现动作等时对盘片予以载放并使其旋转再现的盘片再现部400;使盘片夹持部300与盘片再现部400的双方移动的移动机构部。盘片驱动装置主要由盘片再现部400构成。
下面,首先详细说明盘片夹持部300,接着详细说明盘片再现部400。
[3-1.盘片夹持部]
用图10、图11来说明盘片夹持部300的结构。
这里,图10是表示盘片夹持部300及其周边构件之结构的结构图,(a)是俯视图,(b)是(a)的主视剖视图。
另外,图11是图10的主要部分的详细图,(a)是右侧剖视图,(b)是表示滑块左侧方向的形状的说明图。
在图10、图11中,301是夹紧器,该夹紧器301形成有在相对于盘片面的部位所设置的与盘片相抵接的抵接部3011和挂在提升臂303的抓提部3031(后述)上而可抓提的抓捏部3012。
302是支承夹紧器301的夹紧器臂,该夹紧器臂302形成有:能插入设于底座部306上的轴部3061(后述)且可旋转支承的支轴孔3021;能插入形成于提升臂303上的滑动孔3034(后述)且作滑动的销3022;以及能插入形成于连杆部305上的销3051(后述)且作滑动的滑动孔3023。
另外,303是对夹紧器部301予以保持并由弹簧307(后述)始终向上方施力的提升臂,该提升臂303形成有:对设于夹紧器301上的抓捏部3012予以抓提的抓提部3031;使提升臂303绕夹紧器臂302作为轴而转动的支轴部3032;能插入设于底座部306上的轴部3061(后述)且可转动支承的滑动孔3033;使设于夹紧器臂302上的销3022滑动的滑动孔3034;以及能插入形成于连杆部305上的销3051(后述)且作滑动的滑动孔3035。
304是滑块,该滑块304结构是,为向A或B方向移动其一端3041与底座部306(后述)连接,在另一端设置销3042,该销3042能插入连杆部305的滑动孔3053(后述)作滑动。
另外,305是连杆部,该连杆部305包括:插入夹紧器臂302的滑动孔3023与提升臂303的滑动孔3035而作滑动的销3051;使连杆部305绕底座部306(后述)作为轴而转动的支轴部3052;以及能插入设于滑块304上的销3042作滑动的滑动孔3053。
又,306是与未存放盘片时的储片部501大致平行地设在盘片装载部200附近的底座部,该底座部306形成有:能插入夹紧器部302的支轴孔3021与提升臂303的滑动孔3035的支轴3061;移动滑块304时使滑块304的一端3041抵接并移动的抵接部3062。
而307是用弹簧形成的施力部,该施力部307的一端与夹紧器臂302连接,另一端与提升臂303连接。
下面结合图10~图16来说明动作。
图10及图11是表示还未接受再现动作指令的状态图,图12是表示通过接受再现动作指令而盘片载放部400开始向A方向移动、随着该移动盘片夹持部300也开始向A方向移动的状态图,图13是表示盘片夹持部300从图12的状态移动到盘片再现动作位置附近后的状态图,图14是表示盘片夹持部300与盘片R抵接后的状态图,图15是表示盘片可再现的状态图。
另外,图10(a)表示结构的俯视图,(b)是(a)的主视图,图11(a)表示图10的侧视图,(b)是图10的主要部分的详细图。
此外,图12~图15(a)表示动作状态的俯视图,(b)是分别表示(a)的侧视图。
图16是表示盘片夹持部300主要部分的动作状态图,(a)是盘片未安装状态,(b)是使盘片与盘片夹持部300抵接后的状态,(c)是分别表示用盘片夹持部300与盘片载放部400夹持盘片后的状态图。
首先,因无来自操作部(未图示)的再现开始的指令,故盘片再现部400(关于该动作后述)不能动作,因此,随着盘片再现部400的动作而通过滑块304与连杆部305来进行动作的夹紧器臂302也不能动作,保持图10、图11所示的状态。
其次,当如图12所示那样从操作部接受再现指令时,首先盘片再现部开始向A方向移动,与该盘片载放部的一部分连接(详细后述)的滑块304也向A方向动作。
此时,由于设于滑块304的一端上的销3042也同样向A方向动作,故在连杆部305的滑动孔39053内向A方向进行移动。因此,连杆部305以连杆305的支轴部3052为轴而向B方向进行旋转,夹紧器臂302与提升臂303利用连杆部305的销3051以支轴部3061为轴而向C方向旋转。
图12的动作之后,使存放了盘片R的储片部501如图13所示向D方向移动,储片部503在盘片R的再现动作位置进行待机。
另外,储片部的结构和动作等的说明如后述
接着如图14所示,盘片再现部400再次向A方向动作,滑块304也随着移动到形成于底座部306上的抵接部3062A侧的终端部。因此,由滑块304经上述的动作连动,夹紧器臂302与提升臂303被配置在盘片R的再现动作位置。
随后,如图14所示,提升臂303的抓提部3031离开由夹紧器臂302保持的抓捏部3012,夹紧器301的抵接部3011与盘片表面中心抵接,与从盘片背面支承的盘片再现部400的回转台401一起夹持盘片。
此外,在图14的动作结束后,为使盘片R进行再现动作,如图15所示,使储片部501向A方向移动而回到原来的位置,开始再现盘片R。
这里,用图16对由夹紧器301和盘片再现部400的回转台401夹持盘片R的状态进行简单说明。
首先,如图16(a)所示,在盘片R未配置在再现动作位置的场合,在使夹紧器臂302移动到盘片R的再现动作位置的同时,提升臂303将夹紧器臂302向E方向提起,盘片R就能容易插入夹紧器301与回转台401的间隙d1。
其次,如图16(b)所示,当夹紧器臂302配置在盘片R的再现动作位置、盘片R也配置在再现动作位置时,由于提升臂303向F方向移动并离开夹紧器301的抓捏部3012,故受到G方向施力的夹紧器301的抵接部3011与盘片R的表面抵接。
间隙(d2)小于图16(a)的d1。
此外,如图16(c)所示,由于因设在夹紧器30 1的抵接部3011的被磁化面30111和设在回转台401的盘片配置部4011的磁铁产生吸引力,故夹紧器301与回转台401被吸引,结果盘片R被夹持,此时的间隙为d3,假设盘片R的厚度为D,则d3≈D。
另外,当结束再现、将盘片R存放于盘片存放机构500时,就逆方向进行上述的动作,即为:图15→图14→图13→图12→图10、11。
[3-2.盘片再现部]
用图17说明盘片再现部400的结构。
图17是表示盘片再现部400结构的结构图,(a)是俯视图,(b)是沿XVII-XVII线的主视剖视图。
在图17中,401是使盘片旋转动作的回转台,在该回转台401上,形成有载放盘片的载放部4011和在夹持盘片时插入盘片中心孔的突部4012,在载放部4011上设有磁铁40111。
另外,402是使将记录于盘片上的信息予以读取的光拾波器部403向A方向移动的光拾波器驱动部,404是为了向A方向移动而对光拾波器部403进行导向的光拾波器导向部,405是根据光拾波器驱动部402的驱动力而向C方向或D方向转动的形成螺纹状的光拾波器进给螺纹部。
这里,光拾波器部403包括:将光源发到盘片上而将记录在盘片上的信息予以读取的拾波器4031;为使光拾波器部403向A方向或B方向移动而将其支承在光拾波导向部404上的支承部4032、4033;以及为与光拾波器进给螺纹部405的螺纹部旋合而形成的螺纹部4034。
此外,通过传递光拾波器驱动部402的转动驱动力而使光拾波器进给螺纹部405向C方向或D方向旋转,螺纹部4034就使光拾波器进给螺纹部405的旋转力向A方向或B方向移动,所以光拾波器部403向A方向或B方向移动。
下面用图18说明使上述的盘片再现部400在盘片装置内动作的动作机构的结构。
图18是表示使盘片再现部400向A方向或B方向移动的移动机构部450的结构图,且该图18表示将盘片R存放在储片部501中的状态。
另外,图18(a)是俯视图,(b)是主视剖视图。
在图18中,450是如上述那样使图17所示的盘片再现部400移动的移动机构部,移动机构部450包括底座部451、底座驱动部452、电动机453、齿轮部454、板导向体455、滑块456、第1连杆部457、第2连杆部458以及支轴部459。
另外,上述的滑块304与滑块456连接成一体。
以下详细说明它们的结构。
首先,451是固定在基座部306上、支承连接盘片再现部400且可沿E方向或F方向移动的基座部,452是使滑块456(后述)沿E方向或F方向移动的基座驱动部,453是使盘片滚子部200、盘片夹持部300以及盘片再现部400动作的马达,454是把马达453的动作传递给滑块456(后述)的齿轮部。
455是固定在基座部451上、引导滑块456和盘片再现部400的、具有槽的引导板,456是与齿轮部454螺纹结合、根据齿轮部454的转动而向E方向或F方向移动的滑块,滑块456是可滑动地安装在引导板455及基座451上的滑块456一部。
另外,457是第1联杆部,其一端设有可在设于滑块456局部的滑动孔4562内滑动的销子4571,另一端形成可转动地固定在基座部451上的支轴部4572;458是第2联杆部,其一端形成可转动地支承在滑块456上的支轴部4581,另一端形成可在形成于基座部451局部的滑动孔4511内滑动的销子4582;459是把第1联杆部457与第2联杆部458连接、同时可转动地支承第1联杆部457和第2联杆部458的支轴部。
以下结合图18~图28说明移动机构部450的动作。
如上所述,首先,图18表示因未收到再现指令,故而盘片再现部400未进入工作状态,如图18所示,滑块456、第1联杆部457以及第2联杆部458位于最接近插入口101的位置。
图19表示在图18所示的动作机构中安装图17所示的盘片再现部400后的状态,盘片再现部400与存放在储片部501的盘片R不重合。
图20是表示图18、图19的左侧面的状态图,(a)是侧视图,(b)是侧面说明图。
然后,一旦盘片装置收到再现动作的指令,马达453便开始驱动,其驱动力经过齿轮传递给滑块456而向F方向移动,因此与滑块456连接的盘片再现部400也向F方向移动,图21表示这一状态。
在这一状态下,由于上述机构的作用,盘片滚子机构200便如图12(b)所示而上下打开,使盘片R能够进入。
另外,储片部501向E方向移动,盘片R从R1向再现动作位置R2移动。
如果在图21所示的状态下安装盘片再现部400,即成为图22所示的状态。
还有,一旦盘片再现部400移动到盘片的再现动作位置并结束各自的移动,就用盘片夹持部300和盘片再现部400夹持盘片,开始盘片R的再现动作。
图23表示这一状态,图24表示安装了盘片再现部400后的状态。
在图23和图24中,由于马达453继续驱动,故经过齿轮部454而使滑块456沿E方向移动。
由于滑块456沿E方向继续移动,第1联杆部457的销子4571在滑块456的滑动孔4562内继续向G方向滑动,而一旦到达滑动孔4562的靠滑块304一侧的端部,其向G方向的继续移动便被阻止。
第2联杆部458也与第1联杆部457同样,销子4582在基座451的滑动孔4511内继续向G方向滑动,而一旦到达滑动孔4511的靠滑块304一侧的端部,其向G方向的继续移动便被阻止。
从而,由于第1联杆部457和第2联杆部458的移动被阻止,该移动停止的部位正是设定的盘片R的再现动作位置,故很容易设定盘片再现动作位置。
图25~图28分别用主要部分的右侧和左侧剖视图来表示上述的动作过程。
图25是右侧剖视图,(a)是把图10与图19组合后的状态,(b)是把图12与图22组合后的状态,(c)是把图13与图24组合后的状态。
图26表示右侧视图,与图25同样,(a)是把图10与图19组合后的状态,(b)是把图12与图22组合后的状态,(c)是把图13与图24组合后的状态。
图27是右侧剖视图,(a)是把图10与图19组合后的状态,(b)是把图12与图22组合后的状态,(c)是把图13与图24组合后的状态。
图28是右侧视图,与图27同样,(a)是把图10与图19组合后的状态,(b)是把图12与图22组合后的状态,(c)是把图13与图24组合后的状态。
[4.盘片存放装置]
以下说明盘片存放装置。
盘片存放装置500大致可分为以下三部分:储片部501~504、为使该储片部501~504移动而进行驱动的驱动机构部510、通过该驱动机构部510的驱动力而使储片部501~504在每个规定阶段作规定移动的移动机构部520。
储片部移动装置由驱动机构部510和移动机构部520构成。
这里首先用图29及图30说明第1个储片部的结构。
图29是将盘片存放机构500的主要结构分解后的主要部分分解图,图30表示组装后的状态。
以下在说明作为主要部分的储片部时,把处于最上层的储片部作为第1储片部501,并以该储片部501为代表进行说明。
在图29和图30中,第1储片部501由:载置存放盘片的存放部5011、在把盘片存放在存放部5011后阻止其向A方向动作的挡块5012、通过阻挡存放在存放部5011的盘片周边而阻止盘片向B方向动作的阻挡部5013、与形成于该阻挡部5013上的嵌合孔50131嵌合并以该部位为轴可转动的、在储片部501上形成的凸部5014、与阻挡部5013的阻挡部50134卡合并始终对阻挡部5013向C方向加力的加力部5015、与设于储片部501上的嵌合孔5017嵌合并保持加力部5015的保持部5016构成。
另外,在储片部501周边部局部形成轨道滑动部5018,如图31所示,轨道滑动部5018插入轨道部5019内且可滑动。
以下用图31和图32说明上述第1储片部501的动作。
图31表示第1储片部的存放状态、即盘片R插入后存放于第1储片部501中且使第1储片部501移动到规定位置的状态,图32表示使第1储片部501沿B方向移动的状态、即把盘片R存放在第1储片部501的存放部5011时或把盘片R排出时的状态。
首先如图31所示,在储片部501将盘片R存放在规定位置时,当某种外部原因使盘片R向B方向移动并要从存放位置排出时,虽然盘片R使阻挡部5013在E方向受到旋转力,但由于设在阻挡部5013上的轨道抵接部50133与轨道部5019抵接,阻挡部5013的旋转被阻止,因此阻挡部5013仍保持着盘片R,盘片R的移动被阻止。
接着,在对盘片进行运送或再现动作等时,即在对盘片装载部100交接盘片时,或对盘片再现部400交接后进行盘片R的再现动作时,需要解除图31所示的对盘片R的阻止。
因此,如图32所示,一旦第1储片部501沿B方向移动,轨道部5019即脱离设于阻挡部5013上的轨道抵接部50133,不再阻止阻挡部5013向E方向的旋转,就能够解除阻挡部5013对盘片R的保持。
这里,用图33~图35简单说明盘片送出入机构100和盘片再现部400及盘片存放机构500之间的动作关系。
图33表示把盘片R插入并存放于第1储片部501或从第1储片部501排出盘片R时的状态,图34表示第1储片部501存放的盘片R向盘片再现动作位置移动、以及盘片再现部400移动到盘片再现动作位置时的状态,图35表示第1储片部501返回到存放位置、盘片R作再现动作的状态。
首先如图33所示,一旦把盘片R从插入口(未图示)插入,第1储片部501的轨道滑动部5018就沿支承在框架100上的轨道部5019向A方向滑动,故第1储片部501也向A方向伸出。
这时,阻挡部5013因轨道部5019未与轨道抵接部50133抵接而可向B方向旋转。
因此,盘片R由于上部盘片滚子201的旋转驱动力而抗拒加力部5015的加力而使阻挡部5013沿B方向旋转,从而顺利地存放于第1储片部501的存放部5011中。
接着,如图34所示,一旦从操作部(未图示)接受盘片R的再现动作指令,盘片再现部400即沿B方向移动,并设定于虚线所示的400B的位置。
图35表示这种设定完成后的状态。
以下用图36说明驱动机构部510。
图36是表示驱动机构部及其周围结构的俯视图。
驱动机构部510是通过使各种支臂部动作而使储片部501~储片部504向上下方向以及C或D方向移动的机构,也是使基座部451上下方向移动的机构。
另外,使第1储片部501~第4储片部504沿C或D方向移动的机构也可以设于基座部306、451。
在图36中,511是受设在框架100上的驱动部(未图示)的驱动而以旋转轴5111为中心向A或B方向旋转的凸轮部,在该凸轮部511的表面,在外周侧和内周侧分别形成外周滑动孔5112和内周滑动孔5113。
512是第1支臂部,该第1支臂部512上形成可转动地支承在位于上方的框架100局部(未图示)的支轴部5121、与第2凸轮板(后述)的一端连接的销子5122、与第2凸轮板的另一端连接的销子5123以及可滑动地插入凸轮部511的外周滑动孔5112的销子5124。
该盘片再现部400也是使内装连接的基座部451上下方向移动的机构。
另外,使第1储片部501~第4储片部504沿C或D方向移动的机构也可以设于基座部306、451。
513是以支轴部5131为中心可转动的第2支臂部,该第2支臂部513的一方分支成凸轮支臂5132和板支臂5133,在凸轮支臂5132的一端形成可滑动地插入凸轮部511的内周滑动孔5113的销子51321,在板支臂5133的一端形成与第1凸轮板(后述)的一端连接的销子51331和板支臂5133局部的形成的、在第3支臂部514的滑动孔5143(后述)内滑动的销51332。
而第2支臂部513的另一方形成与第1凸轮板的另一端连接的销子5134、在第4支臂部515的滑动孔5153(后述)内滑动的销子5135、以及防止与第4支臂部515的转动轴5151(后述)接触的孔5136。
514是第3支臂部,该第3支臂部514可以转动轴5141为中心转动,其一端形成与第3凸轮板(后述)的一端连接的销子5142,且形成供第2支臂部512的销子51332滑动的滑动孔5143。
515是第4支臂部,该第4支臂部515可以转动轴5151为中心转动,其一端形成与第3凸轮板(后述)的一端连接的销子5152,且形成供第2支臂部512的销子5135滑动的滑动孔5153。
由上述这些凸轮部511、第1支臂部512、第2支臂部513、第3支臂部514以及第4支臂部515构成驱动机构部510。
通过如上述那样构成驱动机构部510,可根据凸轮部511的转动力使第1支臂部512~第4支臂部515向C或D方向移动,故可用凸轮部511的旋转角度把第1支臂部512~第4支臂部515设定在所需的位置上。
以下用图37和图38说明移动机构部520。
图37(a)是表示移动机构部520主要部分的俯视剖视图,图37(b)及图38是从图37(a)所示的A方向看的侧视图,表示构成的全部构件。
该移动机构部520是根据从驱动机构部510传递的驱动力而调节第1储片部~第4储片部的高度和各储片部之间间隙等的机构。
在图37~图39中,521是设于框架100内、使第1储片部501~第4储片部504能相对盘片运送路径而平行移动的轨道部,在该轨道部521上形成凸出部505、506。
另外,轨道部521与轨道部5019相同。
522是储片部基座,该储片部基座522具有:引导第1轨道部~第4轨道部的凸出部505向B或C方向、即向储片部的上下方向移动的引导部5221、与引导部5221同样地引导第1轨道部~第4轨道部的凸出部506向B或C方向移动的引导部5222、引导第3凸轮板523的销子5234(后述)向D或E方向移动的引导部5223以及引导第3凸轮板523的销子5235(后述)向D或E方向移动的引导部5224。
523是第3凸轮板,该第3凸轮板523具有:与图36所示的第3支臂514的销子5142连接的连接部5231、将第1轨道部~第4轨道部的凸出部505插入且对该凸出部505的高度进行调节的倾斜引导部5232、形成倾斜部且在第1轨道部~第4轨道部的凸出部506插入后进行引导的倾斜引导部5233、插入储片部基座522的引导部5223后滑动的销子5234以及插入储片部基座522的引导部5224后滑动的销子5235。
另外,524是储片分开部,该储片分开部524由2个储片分开部5241和储片分开部5242构成,储片分开部5241存放于第2凸轮板525的存放部5254(后述)中且通过第2凸轮板525的移动而将所需的1个储片部分开,储片分开部5242也与储片分开部5241同样,存放于第2凸轮板525的存放部5255(后述)中且通过第2凸轮板525的移动而将所需的1个储片部分开。
525是第2凸轮板,具有:供第1轨道部~第4轨道部的凸出部505插入且局部形成梳状52521的调节凸出部505的高度的高度调节部5252、供第1轨道部~第4轨道部的凸出部506插入且局部形成梳状52531的调节凸出部506的高度的高度调节部5253、存放储片分开部5241的存放部5254以及存放储片分开部5242的存放部5255。
526是基座部,该基座部526形成基座部451的侧壁,具有:将储片分开部5241的滑动部5245插入、使之向D或E方向滑动的滑动孔5261;将储片分开部5242的滑动部5246插入、使之向D或E方向滑动的滑动孔5262;将在图18所示的动作机构部450上形成的凸部(未图示)插入、使动作机构部450向D或E方向滑动的滑动孔5263、5264;插入第1凸轮板527的滑动孔5272和设于侧基座528上的滑动孔5281(分别后述)、向F或G方向滑动的销子5265;插入第1凸轮板527的滑动孔5273和设于侧基座528上的滑动孔 5282(分别后述)、向F或G方向滑动的销子5266。
527是第1凸轮板,该第1凸轮板527具有:与图36所示的板支臂5133上形成的销子51331连接、对应板支臂5133的动作而使第1凸轮板527向D或E方向移动的连接部5271;把在基座部526上形成的销子5265(后述)插入、使之向F、G方向滑动的5272;把在基座部526上形成的销子5266(后述)插入、使之向F、G方向滑动的5273;插入在侧基座部528上形成的滑动孔5283(后述)、向D或E方向滑动的销子5274;插入在侧基座部528上形成的滑动孔5284(后述)、向D或E方向滑动的销子5275。
528是成为框架100的侧壁的侧基座部,该侧基座部528具有:将在基座部526上形成的销子5265插入、使之向F或G方向滑动的滑动孔5281;将在基座部526上形成的销子5266插入、使之向F或G方向滑动的滑动孔5282;将在第1凸轮板527上形成的销子5274插入、使之向D或E方向滑动的滑动孔5283;将在第1凸轮板527上形成的销子5275插入、使之向D或E方向滑动的滑动孔5284。
该侧基座部528安装在框架100上。
上述的轨道部521~侧基座部528从盘片装置的内侧向着外侧,按轨道部521、储片部基座522、包括储片分开部524在内的第3凸轮板523、第2凸轮板525、基座部526、第1凸轮板527、侧基座528的顺序依次安装。
由这些按轨道部521、储片部基座522、第3凸轮板523、储片分开部524、第2凸轮板525、基座部526、第1凸轮板527以及侧基座528构成移动机构部520。
通过如上述那样构成移动机构部520,可以通过驱动机构部510的动作用多个凸轮板调节储片部的高度等,同时可以可靠地将所需的1个储片部分开。
以下用图39~图63说明在第1凸轮板527、第2凸轮板525以及第3凸轮板523上形成的各个滑动孔与在轨道部形成的凸部之间的位置关系形成的移动机构部520的动作模式。
图39(a)是第1凸轮板527的详细说明图,图39(b)是设有储片分开部524的第2凸轮板525的详细说明图,图39(c)是第3凸轮板523的详细说明图。
图40是与驱动机构部510的凸轮部511的动作对应的第1凸轮板527、第2凸轮板525以及第3凸轮板523的动作状态一览图,图41是图40每个动作中轨道部521的凸部在第1凸轮板527、第2凸轮板525以及第3凸轮板523上的位置一览图。
图42~图63是图41所示的第1凸轮板527、第2凸轮板525以及第3凸轮板523与导轨部的凸部位置关系的状态图。
在图42~图63中,(a)表示驱动机构部510的局部与各连接部之间的位置状态,(b)表示引导部521、储片部基座522以及在轨道部上形成的凸部之间的位置状态,(c)表示设有储片分开部524的第2凸轮板525与在储片部上形成的凸部之间的位置状态,(d)表示基座部526、第1凸轮板527以及在储片部上形成的凸部之间的位置状态,(e)表示第1凸轮板527、侧基座部528以及在轨道部521上形成的凸部之间的位置状态。
以下用图39~图63说明移动机构部520的动作。
首先是图39(a),表示根据驱动机构部510的凸轮部511的动作、第1凸轮板527的滑动孔5272使设在基座部526上的销子5265滑动且盘片装置进行规定动作的设定位置,具有该图中所示的①~⑧8个设定位置。
然后是图39(b),表示根据驱动机构部510的凸轮部511的动作、第2凸轮板525的高度调节部5252使轨道部521的凸出部505的设定位置滑动且盘片装置进行规定动作的设定位置,表示设定在梳状部局部52521中的a、或设定在储片分开部的分开孔52411中的d、或设定在高度调节部5252内的b或c中的一个。
图39(c)则表示根据驱动机构部510的凸轮部511的动作、第3凸轮板523的倾斜引导部5232使轨道部521的凸出部505滑动且盘片装置进行规定动作的设定位置,具有5个设定位置。
图40表示把储片部的凸出部从驱动机构部510上形成的外周滑动孔5112的一端51121向另一端51122滑动与储片部的凸出部从内周滑动孔5113的一端51131向另一端51132滑动的过程分成22个动作、该22个动作的各过程中的第1凸轮板527、第2凸轮板525以及第3凸轮板523与储片部的凸出部之间的位置关系以及盘片装置的动作模式。
图41表示储片部的凸出部相对于图40所示的分成22个动作过程中第1凸轮板527、第2凸轮板525以及第3凸轮板523所处的位置。
图42~图63则表示图40、图41所示的第1过程(以下称NO1)~第22过程(以下称NO22),图42对应图40、图41的NO1,图63对应NO22,图43~图62分别对应NO2~NO21。
以下结合图39~图41顺序说明移动机构520的每1个动作过程。
首先,N01表示向第1储片部501运送盘片R1的动作模式,如图40所示,第1凸轮板527设定在①部位,第2凸轮板525设定在a部位,第3凸轮板523设定在A部位。
从而,如图42(c)所示,轨道部521的凸出部505与第3凸轮板527的梳状部局部啮合,将储片部的高度锁定。
另外,驱动机构部510的凸轮部511沿图36所示的B方向旋转1个过程的量,成为NO2的动作状态,将在NO1进行的储片部的锁定解除。
图43表示该NO2的状态,第1凸轮板527仍在①部位,第3凸轮板523仍在A部位,设定部位没有变化,而第2凸轮板525被设定在b部位。
进而,驱动机构510的凸轮部511从NO2的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO3的动作状态,使第1储片部~第4储片部从原来的设定位置上升1层。
图44表示该NO3的状态,第2凸轮板525仍处于b的部位,设定部位没有变化,第1凸轮板527则被设定在②部位,第3凸轮板523被设定在B部位。
接着,驱动机构510的凸轮部511从NO3的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO4的动作状态,将第1储片部~第4储片部锁定,成为向第2储片部502运送盘片R2的动作模式。
图45表示该NO4的状态,第1凸轮板527仍处于②部位,第3凸轮板523仍处于B部位,设定部位没有变化,第2凸轮板525则被设定在a部位。
驱动机构510的凸轮部511再从NO4的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO5的动作状态。
图46表示该NO5的状态,将在NO4进行的锁定解除,第1凸轮板527仍处于②部位,第3凸轮板523仍处于B部位,设定部位没有变化,第2凸轮板525则被设定在b部位。
驱动机构510的凸轮部511再从NO5的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO6的动作状态。
图47表示该NO6的状态,使第1储片部~第4储片部从原来的设定位置上升1层。
第2凸轮板525仍处于b部位,设定部位没有变化,第1凸轮板527则被设定在③部位。第3凸轮板523被设定在C部位。
接着,驱动机构510的凸轮部511从NO6的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO7的动作状态,将第1储片部~第4储片部锁定,成为第3储片部503运送盘片R3的动作模式。
图48表示该NO7的状态,第1凸轮板527仍处于③部位,第3凸轮板523仍处于C部位,设定部位没有变化,第2凸轮板525则被设定在a部位。
驱动机构510的凸轮部511再从NO7的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO8的动作状态,
图49表示该NO8的状态,将在NO7进行的锁定解除,第1凸轮板527仍处于③部位,第3凸轮板523仍处于C部位,设定部位没有变化,第2凸轮板525则被设定在b部位。
驱动机构510的凸轮部511再从NO8的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO9的动作状态,
图50表示该NO9的状态,使第1储片部~第4储片部从原来的设定位置上升1层。
这时,第2凸轮板525仍处于b部位,设定部位没有变化,第1凸轮板527则被设定在④部位。第3凸轮板523被设定在D部位。
接着,驱动机构510的凸轮部511从NO9的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO10的动作状态,将第1储片部~第4储片部锁定,成为向第4储片部504运送盘片R4的动作模式。
图51表示该NO10的状态,第1凸轮板527仍处于④部位,第3凸轮板523仍处于D部位,设定部位没有变化,第2凸轮板525则被设定在a部位。
驱动机构510的凸轮部511再从NO10的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO11的动作状态。
图52表示该NO11的状态,将在NO10进行的锁定解除,第1凸轮板527仍处于④部位,第3凸轮板523仍处于D部位,设定部位没有变化,第2凸轮板525则被设定在b部位。
驱动机构510的凸轮部511从NO11的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO12的动作状态。
图53表示该NO12的状态,通过将第1凸轮板527设定在⑤部位、第2凸轮板525设定在c部位、第3凸轮板523设定在E部位,而将第4储片部504设定在与其他储片部501~503分离的待机位置。
接着,驱动机构510的凸轮部511从NO12的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO13的动作状态,成为将存放在第4储片部的盘片R4进行再现的动作模式,把其他第1储片部~第3储片部与第4储片部分开。
图54表示该NO13的状态,第1凸轮板527仍处于⑤部位,第3凸轮板523仍处于E部位,设定部位没有变化,第2凸轮板525则被设定在d部位。
如图54(b)所示,在分开储片部时,要使储片部之间的间隙具有规定的角度θ。
另外,无论要分开的储片部的位置如何,各储片部之间的间隙角度既可以相同也可以不同。即,譬如在将第2储片部分开时,第1储片部501与第2储片部502之间的角度既可以和第2储片部502与第3、4储片部503、504之间的角度相同也可以各不相同。
驱动机构510的凸轮部511再从NO13的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO14的动作状态。
图55表示该NO14的状态,第1凸轮板527仍处于⑤部位,第3凸轮板523仍处于E部位,设定部位没有变化,而第2凸轮板525被设定在c部位,从而再度使储片部的凸出部各自的间隙变窄。
驱动机构510的凸轮部511再从NO14的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO15的动作状态。
图56表示该NO15的状态,第2凸轮板525仍处于c部位,第3凸轮板523仍处于E部位,设定部位没有变化,而第1凸轮板527被设定在⑥部位,使基座部526上升。
接着,驱动机构510的凸轮部511再从NO15的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO16的动作状态,成为将存放在第3储片部中的盘片R3进行再现的动作模式,把其他的第1储片部、第2储片部以及第4储片部与第3储片部分开。
图57表示该NO16的状态,第1凸轮板527仍处于⑥部位,第3凸轮板523仍处于E部位,设定部位没有变化,第2凸轮板525被设定在d部位。
接着,驱动机构510的凸轮部511从NO16的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO17的动作状态。
图58表示该NO17的状态,第1凸轮板527仍处于⑥部位,第3凸轮板523仍处于E部位,设定部位没有变化,第2凸轮板525被设定在c部位。
通过这样的设定,使第1储片部501~第4储片部504的凸出部各自的间隙再度变窄。
驱动机构510的凸轮部511再从NO17的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO18的动作状态。
图59表示该NO18的状态,第2凸轮板525仍处于c部位,第3凸轮板523仍处于E部位,设定部位没有变化,而第1凸轮板527被设定在⑦部位,使基座部526上升。
接着,驱动机构510的凸轮部511从NO18的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO19的动作状态,成为将存放在第2储片部中的盘片R2进行再现的动作模式,并把其他的第1储片部、第3储片部以及第4储片部与第2储片部分开。
图60表示该NO19的状态,第1凸轮板527仍处于⑦部位,第3凸轮板523仍处于E部位,设定部位没有变化,第2凸轮板525被设定在d部位。
接着,驱动机构510的凸轮部511从NO19的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO20的动作状态。
图61表示该NO20的状态,第1凸轮板527仍处于⑦部位,第3凸轮板523仍处于E部位,设定部位没有变化,第2凸轮板525被设定在c部位。
通过这样的设定,使第1储片部501~第4储片部504的凸出部各自的间隙再度变窄。
驱动机构510的凸轮部511再从NO20的动作状态起沿图36所示的B方向旋转1个过程的量,成为NO21的动作状态。
图62表示该NO21的状态,第2凸轮板525仍处于c部位,第3凸轮板523仍处于E部位,设定部位没有变化,而第1凸轮板527被设定在⑧部位,使基座部526上升。
最后,驱动机构510的凸轮部511从NO21的动作状态起沿图36所示的B方向旋转1个过程的量,即图36所示的第1支臂512的销子5124被设定在凸轮部511的外周滑动孔5112的另一端51122,凸轮支臂5132的销子51321被设定在凸轮部511的内周滑动孔5113的另一端51132,成为NO22的动作状态。
图63表示该NO22的状态,第1凸轮板527仍处于⑧部位,第3凸轮板523仍处于E部位,设定部位没有变化,第2凸轮板525被设定在d部位。
一旦NO22的动作完毕,下一个动作过程就按与上述相反的方向、即按N22→NO21→NO20…→NO1的顺序进行。
这里,图64表示第1凸轮板527,图65表示第2凸轮板525,图66表示第3凸轮板523,图64(a)表示轨道部521的凸出部被设定在图39(a)所示的⑦位置时的状态,(b)表示轨道部521的凸出部被设定在图39(a)所示的①位置时的状态。
另外,图65(a)表示轨道部521的凸出部被设定在图39(b)所示的d位置时的状态,图65(b)表示轨道部521的凸出部被设定在图39(b)所示的c位置时的状态,图65(c)表示轨道部521的凸出部被设定在图39(b)所示的b位置时的状态,图65(d)表示轨道部521的凸出部被设定在图39(b)所示的a位置时的状态。
而图66(a)表示轨道部521的凸出部被设定在图39(c)所示的E位置时的状态,图66(b)表示轨道部521的凸出部被设定在图39(c)所示的C位置时的状态,,图66(c)表示轨道部52 1的凸出部被设定在图39(c)所示的A位置时的状态。
由于以上述方式构成移动机构部520,故通过对驱动机构部510的凸轮部511的旋转角进行控制,能可靠地控制各储片部的动作。
关于储片部的动作,如上所述,在置于所需的设定位置时,要依次经过动作过程,譬如在设定成NO19时作NO10动作的场合,要经过NO19→NO18→NO17…→NO10这样的动作过程。
[5.盘片装置整体的动作说明]
以下结合图67~图95说明上述实施形态1所示的盘片装置整体的3个基本动作,即,①从未存放盘片的状态起使所有的储片部存放盘片、并将所定的盘片进行再现的动作,②在再现所定盘片的过程中切换到再现另一盘片的动作,③停止所定盘片的再现、将所定盘片排出的动作。以下详细说明。
首先结合图67~图82说明①的动作、即说明在盘片装置内未存放盘片的状态下从第1储片部501起到第4储片部顺序存放盘片、直至将存放在第2储片部中的盘片R2进行再现为止的盘片装置整体的动作过程。
图67表示未存放任何盘片的状态,图68表示从操作部(未图示)等接受了将盘片R1插入第1储片部501的指令、第1储片部已向插入口方向移动的状态,图69表示从盘片插入口101插入了盘片R1后的状态,图70表示已将盘片R1存放在第1储片部501的盘片存放部的状态,图71表示存放了盘片R1的第1储片部501移动到原来位置、即图67所示位置的状态。
图72表示全体储片部上升1层后的状态,图73表示从操作部(未图示)等接受了将盘片R2插入第2储片部502的指令、第2储片部已向插入口方向移动的状态,图74表示从盘片插入口101插入了盘片R2后的状态,图75表示已将盘片R2存放在第2储片部502的盘片存放部的状态,图76表示存放了盘片R2后第2储片部502移动到原来位置、即图67所示位置的状态。
图77表示将盘片R3存放在第3储片部503、第3储片部502移动到原来位置、即图67所示位置的状态,图78表示将盘片R4存放在第4储片部504、第4储片部504移动到原来位置、即图67所示位置的状态,
图79表示从操作部(未图示)等接受了盘片R2的再现动作的指令、存放有盘片R2的第2储片部502与除该第2储片部502以外的第1储片部501、第3储片部503以及第4储片部504分开后的状态,图80表示为了对盘片R2进行再现、盘片夹持部300和盘片再现部400移动的状态。
图81表示第2储片部502向插入口方向移动的状态,图82表示盘片R2被盘片夹持部300和盘片再现部400夹持、第2储片部502返回到原来位置并进行再现动作的状态。
图67~图82各自的(a)为上部剖视图,(b)为a-a线的侧剖视图。
首先如图67所示,在盘片装置内未存放盘片的状态下、即在初始状态下,第1储片部501~第4储片部504位于与插入口相反一侧的框架100周缘部附近,同时各储片部上下之间几乎没有间隙。
另外,盘片再现部400以及盘片夹持部300位于插入口101附近的上部盘片滚子210和下部盘片滚子202的附近,在两边的盘片滚子的间隙保持在最小的状态下等待从操作部(未图示)发出插入盘片的指令。
从操作部输出规定指令、即输出在第1储片部501存放盘片R1的指令。
接着,使上述各储片部从图67所示的位置移动的移动机构部520就使第1储片部501沿B方向移动并使之位于图68所示的规定位置、即可存放盘片R的位置,等待盘片的插入。
然后,如图69所示,一旦将盘片R1从插入口101插入,即通过盘片装载机构200将盘片R1存放于第1储片部501(图70),并使第1储片部501沿A方向移动而返回图67所示的原来位置(图71)。
而且,在插入下一张盘片R2之前,为了使即将存放盘片R2的储片部502与插入口101的高度一致,上述的移动机构520使全体储片部上升相当于一个储片部厚度的高度(图72),并使要存放盘片R2的第2储片部502沿B方向移动并位于规定的位置(图73),盘片装载部200将从插入口101插入的盘片R2运送到盘片装置内(图74),将盘片R2存放保持在第2储片部502上(图75),如图76所示,并使第2储片部502沿A方向移动返回到原来位置。
同样,如图78所示,盘片R3存放于第3储片部503中,如图79所示,盘片R4存放于第4储片部中。
这时,如图79(b)所示,储片部被分开,具体地说就是把第1储片部501与第2储片部502之间的间隙设为第1角度θ1,把第2储片部502与第3、4储片部503、504之间的间隙设为第2角度θ2,这样把第2储片部502与第1储片部501、第3储片部503以及第4储片部504分开。
然后一旦从操作部(未图示)接受了盘片R2的再现动作指令,首先是上述移动机构520如图79所示,把存放了要再现的盘片R2的第2储片部502设置在盘片R2能够再现的规定高度,并将其他的储片部倾斜地分开。
而且,盘片夹持部300进入盘片R1与盘片R2之间的间隙中,盘片再现部400沿A方向移动并进入盘片R2与盘片R3之间的间隙中,上部盘片滚子201与下部盘片滚子202之间的间隔扩大(图80)。
又如图81所示,为了再现盘片R2,使存放了盘片R2的第2储片部502沿B方向移动到规定的位置。
接着,如图82所示,盘片夹持部300继续沿A方向移动,并进入第1储片部501与第2储片部502之间的间隙,同样,盘片再现部400也继续沿A方向移动,并进入第2储片部502与第3储片部503之间的间隙,上部盘片滚子201与下部盘片滚子202之间的间隙达到最大,用盘片夹持部300和盘片再现部400夹持盘片R2,然后,第2储片部502移动到原来位置并解除对盘片R2的保持后进行再现动作。
以下用图83~图90说明②的动作、即停止盘片R2的再现、将盘片R2再度存放在第2储片部502、直至对存放在第3储片部503的盘片R3进行再现的整个盘片装置的动作过程。
图83表示在第3储片部503存放盘片R3并正在对盘片R2进行再现的状态,图84表示第2储片部502一边将盘片R2保持在可存放的位置一边移动、盘片再现部400向着图67所示的原来位置稍稍返回的状态,图85表示第2储片部502存放盘片R2后返回原来位置的状态,图86表示盘片夹持部300和盘片再现部400向原来位置的移动结束后的状态。
图87表示全体储片部在各储片部分开状态下的上升状态,图88表示盘片夹持部300和盘片再现部400移动到第3储片部503一侧的状态,图89表示第3储片部503移动到插入口101一侧的状态,图90表示盘片夹持部300和盘片再现部400夹持盘片R3后,第3储片部503移动到原来位置、解除对盘片R3的保持并进行再现动作的状态。
图83~图90各自的(a)为俯视剖视图,(b)为a-a线的侧剖视图。
首先,在为了对盘片R2进行再现,如图83所示,在盘片夹持部300和盘片再现部400夹持盘片R2的状态下,一旦从操作部(未图示)接受再现盘片R3的指令,首先是第2储片部502沿B方向移动,将处于再现位置的盘片R2保持存放。
接着盘片再现部400脱离盘片R2,并沿A方向稍稍返回(图84)。
进而,使存放被解除了盘片夹持部300和盘片再现部400夹持的盘片R2的第2储片部502沿A方向移动并返回原来位置(图85),如图86所示,不仅是盘片再现部400,而且盘片夹持部300也返回原来的位置,上部盘片滚子201与下部盘片滚子202之间的间隙最小。
接着,为了使第3储片部503与插入口101的高度一致,一边将第2储片部502~第4储片部504之间分开,一边上升(图87),并使盘片夹持部300和盘片再现部400沿A方向移动,将上部盘片滚子201与下部盘片滚子202之间的间隙扩大,同时盘片夹持部300进入盘片R2与盘片R3之间的间隙,盘片再现部400位于盘片R3的略微下方(图88)。
进而,使存放着盘片R3的第3储片部503沿B方向移动到可再现的位置上(图89),如图90所示,使盘片再现部400继续沿A方向送入,盘片夹持部300和盘片再现部400将盘片R3夹持。
在夹持了盘片R3后,上部盘片滚子201和下部盘片滚子202之间的间隙扩大到最大,第3储片部503沿A方向移动且返回原来位置,并解除对盘片R3的保持,开始盘片R3的再现。
最后用图90~图96说明③的动作、即在盘片R3再现过程中将盘片R2排出的动作。
图91表示盘片再现部400从图90的状态返回原来位置的中途状态,图92表示第3储片部503以及盘片R3已移动到原来位置的状态,图93表示盘片夹持部300和盘片再现部400向原来位置移动完毕的状态,图94表示全体储片部下降后的状态,图95表示使第2储片部502移动到插入口101一侧、盘片R2被盘片装载机构200夹持的状态,图96表示盘片R2已被排出的状态。
图90~图96各自的(a)是俯视剖视图,(b)是a-a线的侧剖视图。
首先,为了排出盘片R2,如图90所示,在盘片夹持部300和盘片再现部400夹持盘片R3之际,一旦从操作部(未图示)接受了将盘片R2排出的指令,第3储片部503即移动到可存放盘片R3的位置,保持和存放盘片R3。
而且,盘片夹持部300和盘片再现部400沿B方向移动,上部盘片滚子201与下部盘片滚子202之间的间隙扩大(图91)。
在图91的动作状态之后,如图92所示,第3储片部503在存放有盘片R3的状态下沿A方向移动并设定于原来的位置。
接着,如图93所示,使盘片夹持部300沿B方向继续移动并返回原来的位置,使上部盘片滚子201和下部盘片滚子202之间的间隙达到最小,同时为了使第2储片部502的高度与插入口101的高度一致,使全体储片部相互紧贴着移动(图94)。
并且如图96所示,使放着盘片R2的第2储片部502沿B方向移动,并由盘片装载部200将盘片R2排出。
从而,通过采用上述结构,由于可以在第1储片部上方及第4储片部下方的框架内确保设置盘片存放机构500的驱动机构部510的底板等所需的空间,故无需多余的空间,从上方看,盘片运送方向的长度为最小,故可实现盘片装置小型化。
而且,各张盘片可以自由地单独插入和排出,故更加方便了操作者。
由于可以使上部盘片滚子和下部盘片滚子分别向上方、下方移动,故可以在上部盘片滚子与下部盘片滚子之间的间隙中确保盘片再现时所需的盘片空间,可以减少仅为盘片空间所设的空间,使盘片装置小型化。
不过,在上述的实施形态1中,是就再现动作来说明盘片的动作,其实还可以对盘片进行其他的任何动作,譬如记录动作、清除记录内容的清除动作等,具有同样的效果。
实施形态2
以下结合图97~图102说明本发明实施形态2的盘片装置。
在上述的实施形态1中,盘片装载机构200采用图6~图9所示的结构,当然也可采用图97~图102所示的结构,具有同等效果。
在图97~图102中,图97~图99表示上部盘片滚子201一侧的盘片运送机构200的主要部分,图97是主要部分的主视图,图98是主要部分的俯视图,图99是主要部分的侧剖视图,(a)表示夹持盘片R的状态,(b)表示解除对盘片R的夹持的状态。
图100~图102表示下部盘片滚子202一侧的盘片运送机构200的主要部分,图100是主要部分的主视图,图101是主要部分的俯视图,图102是主要部分的侧剖视图,(a)表示夹持盘片R的状态,(b)表示解除对盘片R的夹持的状态。
首先说明上部盘片滚子部的结构及动作。
在图97~图99中,601是在一端支承上部盘片滚子201、局部设有销子6011的上部滚子支臂,602是局部设有销子6021的、图中所示的滑块304的端部,603是开口联杆,在其一端设有与滑块304的端部602上形成的销子6021抵接的抵接部6031。
如图99所示,在滑块304的端部602侧面形成凸出部6022~6024。
另外,604是滚子开口凸轮板,其局部设有使上部滚子支臂601上形成的的销子6011滑动的滑动孔6041,605是加力弹簧,使其一端6051与框架100的局部102卡合、另一端6052与滚子开口凸轮板604卡合、从而使一端6051与另一端6052相互拉引。
以下说明动作。
首先,除了再现盘片R以外,即在用上部盘片滚子210和下部盘片滚子202夹持盘片R的场合,滑块304的端部通过销子6021而将滚子开口凸轮板604向图98所示的B方向推压。
因此,弹簧605比通常状态的长度长,并由于其返回原来长度的加力作用,使开口联杆603与销子6021抵接。
接着,在再现盘片R的场合,滑动304沿图98所示的A方向移动,故滑块304的端部602也沿A方向移动。
因此,与在端部602上形成的销子6021抵接并被阻挡的开口联杆603可沿C方向旋转,由于与该开口联杆603连接且被阻挡的滚子开口凸轮板604原来就被弹簧605向B方向加力,故能够被拉向B方向。
通过这一拉引作用,在上部滚子支臂601上形成的销子6011便在滚子开口凸轮板604上的滑动孔6041内滑动到图99(b-)所示的位置,从而上升相当于d的高度,上部盘片滚子201也相应地上升相当于d的高度。
以下说明下部盘片滚子的结构以及动作。
在图100~图102中,611是下部滚子支臂,在其局部设有与滑块304的端部602上形成的凸出部6022~6024的局部抵接的抵接部6111。
以下说明其动作。
首先,除了再现盘片R以外,即在用上部盘片滚子201和下部盘片滚子202夹持盘片R的场合,滑块304沿D方向移动,故下部滚子支臂611的抵接部6111不与在滑块304的端部602上形成的凸出部6022~6024抵接,下部滚子支臂611被始终向F方向加力的加力部(未图示)的加力作用而向F方向加力。
接着,在再现盘片R的场合,滑动304沿图102所示的E方向移动,故滑块304的端部602也沿E方向移动。
因此,在滑块304的端部602上形成的凸出部6022~6024与下部滚子支臂611的抵接部6111抵接,使抵接部6111以旋转轴6112为中心沿H方向旋转。
从而,与下部滚子支臂连接的下部盘片滚子沿G方向移动。
通过采用上述结构,可以用简单的结构准确地进行盘片滚子部的动作,故可进一步提高盘片装置的可靠性。
上述实施形态2的盘片滚子部200是把图97~图99所示的结构作为上部盘片滚子,把图100~图102所示的结构作为下部滚子,而若把二者组合,设置在上部盘片滚子201和下部盘片滚子202的左右,则如图103~图105所示。
其中,图103是主要部分主视图,(a)是从插入口一侧看的右侧部,(b)是左侧部。
图104是主要部分的俯视图,(a)是从插入口一侧看的左侧部,(b)是右侧部。
图105是主要部分的侧剖视图,与图104同样,(a)是从插入口一侧看的左侧部,(b)是右侧部。
实施形态3
以下说明本发明实施例形态3的盘片装置。
在上述的实施例形态2中,是如图97~图99那样构成上部盘片滚子,如图100~图102那样构成下部盘片滚子,当然也可以用相反的结构,即把图97~图99所示的结构作为下部盘片滚子,把图100~图102所示的结构作为上部盘片滚子,具有同等的效果。
实施形态4
以下说明本发明实施形态4的盘片装置。
也可以将上述实施形态1的盘片装载机构200设置在左右侧部中的任一方,将上述实施形态2的盘片装载机构200设在另一方,具有同等效果。
实施形态5
以下说明本发明实施形态5的盘片装置。
虽在上述实施形态1中未说明,但第1、第2滚子移动装置、即滚子开口凸轮板203、上部滚子支臂204、下部滚子支臂205以及滑块304也可以使第1、第2盘片滚子、即上部盘片滚子201和下部盘片滚子202互为相对地移动,具有同等的效果。
实施形态6
以下说明本发明实施形态6的盘片装置。
虽在上述实施形态1中未说明,但在盘片驱动装置、即盘片再现部400的动作状态切换成非动作状态时,第1、第2滚子移动装置、即滚子开口凸轮板203、上部滚子支臂204、下部滚子支臂205以及滑块304也可以使第1、第2盘片滚子、即上部盘片滚子201和下部盘片滚子202分别移动到上述盘片驱动装置、即盘片再现部400动作之前的设定位置。具有同等效果。
实施形态7
以下说明本发明实施形态7的盘片装置。
虽在上述实施形态1中未说明,但在要把插入装置内部的盘片(R)排出到装置外部时,第1、第2滚子移动装置、即滚子开口凸轮板203、上部滚子支臂204、下部滚子支臂205以及滑块304也可以分别使第1、第2盘片滚子、即上部盘片滚子201和下部盘片滚子202移动、以便与盘片两面中的一面抵接,并用上部盘片滚子201和下部盘片滚子202夹持上述盘片(R),具有同等效果。
工业上利用的可能性
如上所述,本发明的盘片装置使在插入或排出盘片时夹持盘片、再现盘片或更换盘片时夹持盘片的两边的滚子部移动,从而可防止对盘片的损伤。
Claims (4)
1.一种盘片装置,具有:隔着运送盘片(R)的盘片运送路径相对设置、夹持所述盘片运送路径内的所述盘片(R)的两面进行运送的第1、第2盘片滚子(201、202);对所述盘片(R)进行驱动的盘片驱动装置(400),
其特征在于,还设有:当该盘片驱动装置(400)动作时为了在所述第1盘片滚子(201)与面对的所述盘片(R)的面之间形成间隙而使所述第1盘片滚子(201)相对所述盘面向大致垂直方向移动的第1滚子移动装置(203、204、304)、
以及当所述盘片驱动装置(400)动作时为了在所述第2盘片滚子(202)与面对的所述盘片(R)的面之间形成间隙而使所述第2盘片滚子(202)相对所述盘面向大致垂直方向移动的第2滚子移动装置(203、205、304),
在构成所述第1滚子移动装置(203、204、304)以及所述第2滚子移动装置(203、205、304)的构件中,凸轮构件(203)与所述第1盘片滚子(201)和所述第2盘片滚子(202)抵接,调节所述第1盘片滚子(201)与所述第2盘片滚子(202)间的间隙(d1、d2、d3、d4)的大小。
2.根据权利要求1所述的盘片装置,其特征在于,第1、第2滚子移动装置(203、204、205、304)使第1、第2盘片滚子(201、202)分别相互相对地移动。
3.根据权利要求1所述的盘片装置,其特征在于,在盘片驱动装置(400)的动作状态切换成非动作状态时,第1、第2滚子移动装置(203、204、205、304)使第1、第2盘片滚子(201、202)分别移动到所述盘片驱动装置(400)动作前的设定位置。
4.根据权利要求1所述的盘片装置,其特征在于,当把已插入装置内部的盘片(R)向所述装置外部排出时,第1、第2滚子移动装置(203、204、205、304)分别使第1、第2盘片滚子(201、202)移动,以使它们分别与所述盘片两面中的一面抵接,并用所述第1、第2盘片滚子(201、202)夹持所述盘片(R)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP55156/97 | 1997-03-10 | ||
| JP5515697 | 1997-03-10 | ||
| JP55156/1997 | 1997-03-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1219270A CN1219270A (zh) | 1999-06-09 |
| CN1129902C true CN1129902C (zh) | 2003-12-03 |
Family
ID=12990897
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB988002590A Expired - Fee Related CN1159715C (zh) | 1997-03-10 | 1998-02-27 | 盘片装置 |
| CNB988002582A Expired - Fee Related CN1159714C (zh) | 1997-03-10 | 1998-02-27 | 盘片装置 |
| CN98800264A Expired - Fee Related CN1129902C (zh) | 1997-03-10 | 1998-02-27 | 盘片装置 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB988002590A Expired - Fee Related CN1159715C (zh) | 1997-03-10 | 1998-02-27 | 盘片装置 |
| CNB988002582A Expired - Fee Related CN1159714C (zh) | 1997-03-10 | 1998-02-27 | 盘片装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US6941566B2 (zh) |
| EP (3) | EP0915463B1 (zh) |
| JP (3) | JP3369191B2 (zh) |
| KR (3) | KR100323905B1 (zh) |
| CN (3) | CN1159715C (zh) |
| DE (3) | DE69815036T2 (zh) |
| WO (3) | WO1998040887A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100378850C (zh) * | 2004-04-16 | 2008-04-02 | 三菱电机株式会社 | 盘片装置 |
| CN100395838C (zh) * | 2004-04-16 | 2008-06-18 | 三菱电机株式会社 | 盘片装置 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0977197B1 (en) * | 1998-07-30 | 2006-12-20 | Fujitsu Ten Limited | Storage device for recording media |
| JP3822989B2 (ja) * | 1998-12-28 | 2006-09-20 | クラリオン株式会社 | ディスク再生装置 |
| JP3856604B2 (ja) * | 1999-09-02 | 2006-12-13 | アルパイン株式会社 | ディスク収納装置 |
| EP1143435B1 (en) * | 1999-09-28 | 2007-06-20 | Sony Corporation | Recording and/or reproducing device for disks |
| US6594651B2 (en) | 1999-12-22 | 2003-07-15 | Ncr Corporation | Method and apparatus for parallel execution of SQL-from within user defined functions |
| EP1306838B1 (en) * | 2000-05-19 | 2007-08-15 | Clarion Co., Ltd. | Disk holding device |
| JP2001357587A (ja) * | 2000-06-16 | 2001-12-26 | Clarion Co Ltd | ディスクドライブ装置 |
| JPWO2002025654A1 (ja) | 2000-09-20 | 2004-01-29 | 三菱電機株式会社 | ディスク装置 |
| EP1321937A4 (en) * | 2000-09-20 | 2006-04-12 | Mitsubishi Electric Corp | PLATTENGERAET |
| CN1254812C (zh) | 2001-04-16 | 2006-05-03 | 索尼株式会社 | 盘保持构件、盘托架、记录及/或再生装置、换盘装置 |
| EP1612785B1 (en) * | 2003-03-31 | 2011-11-23 | CLARION Co., Ltd. | Disk device, disk-transporting device, and disk-loading device |
| KR20050010335A (ko) | 2003-07-19 | 2005-01-27 | 삼성전자주식회사 | 디스크 카트리지 및 디스크 드라이브 장치 |
| TWM255986U (en) * | 2004-02-20 | 2005-01-21 | Lite On It Corp | A roller used in a slot-in optical recording and/or reproducing apparatus |
| WO2005093743A1 (ja) * | 2004-03-25 | 2005-10-06 | Pioneer Corporation | 記録媒体再生装置 |
| JP4253267B2 (ja) * | 2004-03-25 | 2009-04-08 | パイオニア株式会社 | 記録媒体再生装置 |
| EP1734523B1 (en) * | 2004-03-31 | 2010-11-03 | CLARION Co., Ltd. | Disc device |
| JP4532153B2 (ja) * | 2004-03-31 | 2010-08-25 | クラリオン株式会社 | ディスククランプ装置 |
| US20070201319A1 (en) * | 2004-03-31 | 2007-08-30 | Takashi Mizoguchi | Playback Apparatus For Recording Media |
| JP2005293738A (ja) * | 2004-03-31 | 2005-10-20 | Clarion Co Ltd | ディスククランプ装置 |
| EP1734520B1 (en) * | 2004-03-31 | 2011-06-29 | CLARION Co., Ltd. | Disk clamp device |
| JP4563712B2 (ja) * | 2004-03-31 | 2010-10-13 | クラリオン株式会社 | ディスク装置 |
| JPWO2006009116A1 (ja) * | 2004-07-23 | 2008-07-31 | パイオニア株式会社 | 情報記録媒体再生装置 |
| JP4494230B2 (ja) | 2005-01-19 | 2010-06-30 | パナソニック株式会社 | ディスク装置 |
| JP2008016136A (ja) * | 2006-07-06 | 2008-01-24 | Sony Corp | ディスクトレイ、ディスクドライブ装置及びディスクチェンジャー装置 |
| CN107644652B (zh) * | 2017-11-10 | 2023-06-16 | 深圳市爱思拓信息存储技术有限公司 | 自动收发光盘装置 |
Family Cites Families (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB260349A (en) | 1925-07-29 | 1926-10-29 | George William Beldam | Improvements in packings for making fluid tight joints between parts of engines or machines having relative movement |
| US4337533A (en) * | 1979-09-07 | 1982-06-29 | Kabushiki Kaisha Aiwa | Front loading type record player |
| JPS56137560A (en) * | 1980-03-31 | 1981-10-27 | Victor Co Of Japan Ltd | Clamp device for disc shape information recording medium in disc shape information recording medium playback device |
| US4541086A (en) * | 1983-08-08 | 1985-09-10 | Pioneer Electronic Corporation | Disc clamping mechanism |
| JPS6098140U (ja) * | 1983-12-07 | 1985-07-04 | 日本マランツ株式会社 | コンパクトデイスクプレ−ヤのデイスククランプ装置 |
| JPS60175350U (ja) * | 1984-04-30 | 1985-11-20 | パイオニア株式会社 | 情報記録デイスクのクランパ保持機構 |
| JPS60254450A (ja) * | 1984-05-31 | 1985-12-16 | Sony Corp | デイスクチエンジヤ用デイスクパツク |
| JPS6247893A (ja) * | 1985-08-28 | 1987-03-02 | Hitachi Ltd | 光デイスクカ−トリツジ |
| JPS63200354A (ja) | 1987-02-16 | 1988-08-18 | Matsushita Electric Ind Co Ltd | デイスク装置 |
| CA1307587C (en) * | 1987-03-04 | 1992-09-15 | Yukiyasu Tsuruta | Disc player |
| DE3715942A1 (de) * | 1987-05-13 | 1988-11-24 | Philips Patentverwaltung | Lesevorrichtung fuer auf einer vielzahl von informationsplatten gespeicherte informationen |
| KR0134820B1 (ko) * | 1988-03-07 | 1998-04-22 | 오오가 노리오 | 디스크 매거진과 디스크 로딩 장치 |
| JPH01237952A (ja) * | 1988-03-18 | 1989-09-22 | Nkk Corp | ディスク自動交換方法及び装置 |
| US5053903A (en) * | 1989-03-28 | 1991-10-01 | Literal Corporation | Disk clamp positioning apparatus for information storage disk drive system |
| US5119354A (en) * | 1989-04-06 | 1992-06-02 | Matsushita Electric Industrial Co., Ltd. | Disk reproducing apparatus |
| US5166918A (en) * | 1989-05-15 | 1992-11-24 | Seiko Epson Corporation | Loading mechanism for disk cartridges with vibration reducing mechanism |
| JPH0786999B2 (ja) | 1990-02-09 | 1995-09-20 | パイオニア株式会社 | 複数ディスク収納プレーヤ |
| JPH0787001B2 (ja) * | 1990-02-09 | 1995-09-20 | パイオニア株式会社 | 複数ディスク収納プレーヤ |
| JP2534922B2 (ja) | 1990-02-09 | 1996-09-18 | パイオニア株式会社 | 複数ディスク収納プレ―ヤ |
| JPH05342741A (ja) * | 1992-06-08 | 1993-12-24 | Clarion Co Ltd | ディスク演奏装置 |
| US5481512A (en) * | 1992-06-30 | 1996-01-02 | Victor Company Of Japan, Ltd. | Separable magazine for accommodating discs and a disc player |
| JPH06259864A (ja) * | 1993-03-05 | 1994-09-16 | Nakamichi Corp | ディスク再生装置 |
| JPH06259865A (ja) * | 1993-03-05 | 1994-09-16 | Nakamichi Corp | ディスク再生装置 |
| JP2596255Y2 (ja) * | 1993-03-23 | 1999-06-07 | ナカミチ株式会社 | ディスク再生装置 |
| JP3345120B2 (ja) | 1993-08-10 | 2002-11-18 | タナシン電機株式会社 | ディスク駆動装置 |
| JPH07254207A (ja) * | 1994-01-25 | 1995-10-03 | Sony Corp | ディスクチェンジャ |
| US5561658A (en) * | 1994-02-06 | 1996-10-01 | Nakamichi Corporation | Friction drive for a disc player |
| JP3551482B2 (ja) * | 1994-08-26 | 2004-08-04 | ソニー株式会社 | ディスクプレーヤ装置 |
| US5682369A (en) * | 1994-08-26 | 1997-10-28 | Nakamichi Corporation | Two-belt disk rotating and transport drive |
| KR0122763B1 (ko) * | 1994-12-29 | 1997-11-20 | 배순훈 | 광 디스크 플레이어 |
| JP3001810B2 (ja) * | 1996-06-13 | 2000-01-24 | 富士通テン株式会社 | 記録担体の再生/記録装置 |
| US6052356A (en) * | 1996-06-13 | 2000-04-18 | Fujitsu Ten Limited | Reproduction/recording apparatus having a divisible housing for disc-shaped recording carriers and a reproduction/recording head mounting rack |
| JP3625578B2 (ja) * | 1996-07-04 | 2005-03-02 | パイオニア株式会社 | ディスク再生装置 |
| JP3534542B2 (ja) * | 1996-07-04 | 2004-06-07 | パイオニア株式会社 | ディスク再生装置 |
| JP3557794B2 (ja) * | 1996-07-15 | 2004-08-25 | ソニー株式会社 | ディスクチェンジャ装置 |
| JP3308454B2 (ja) * | 1996-09-25 | 2002-07-29 | アルプス電気株式会社 | ディスクパッケージ |
| JPH10199093A (ja) * | 1996-12-27 | 1998-07-31 | Nakamichi Corp | チェンジャ−型ディスク再生装置 |
| JP3522504B2 (ja) * | 1997-09-08 | 2004-04-26 | アルパイン株式会社 | ディスク選択機能を有するディスク装置 |
-
1998
- 1998-02-27 CN CNB988002590A patent/CN1159715C/zh not_active Expired - Fee Related
- 1998-02-27 KR KR1019980709057A patent/KR100323905B1/ko not_active IP Right Cessation
- 1998-02-27 WO PCT/JP1998/000806 patent/WO1998040887A1/ja active IP Right Grant
- 1998-02-27 DE DE69815036T patent/DE69815036T2/de not_active Expired - Lifetime
- 1998-02-27 EP EP98905680A patent/EP0915463B1/en not_active Expired - Lifetime
- 1998-02-27 JP JP53941798A patent/JP3369191B2/ja not_active Expired - Fee Related
- 1998-02-27 JP JP53835098A patent/JP3366335B2/ja not_active Expired - Fee Related
- 1998-02-27 CN CNB988002582A patent/CN1159714C/zh not_active Expired - Fee Related
- 1998-02-27 WO PCT/JP1998/000805 patent/WO1998040886A1/ja active IP Right Grant
- 1998-02-27 KR KR1019980708987A patent/KR100306354B1/ko not_active IP Right Cessation
- 1998-02-27 US US09/171,655 patent/US6941566B2/en not_active Expired - Lifetime
- 1998-02-27 EP EP98905681A patent/EP0923075B1/en not_active Expired - Lifetime
- 1998-02-27 WO PCT/JP1998/000807 patent/WO1998040888A1/ja active IP Right Grant
- 1998-02-27 DE DE69819847T patent/DE69819847T2/de not_active Expired - Lifetime
- 1998-02-27 EP EP98905682A patent/EP0921523B1/en not_active Expired - Lifetime
- 1998-02-27 CN CN98800264A patent/CN1129902C/zh not_active Expired - Fee Related
- 1998-02-27 KR KR1019980709058A patent/KR100308352B1/ko not_active IP Right Cessation
- 1998-02-27 DE DE69820576T patent/DE69820576T2/de not_active Expired - Lifetime
- 1998-02-27 US US09/171,211 patent/US6392981B2/en not_active Expired - Lifetime
- 1998-02-27 JP JP53941898A patent/JP3366336B2/ja not_active Expired - Fee Related
- 1998-02-27 US US09/171,472 patent/US6256279B1/en not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100378850C (zh) * | 2004-04-16 | 2008-04-02 | 三菱电机株式会社 | 盘片装置 |
| CN100395838C (zh) * | 2004-04-16 | 2008-06-18 | 三菱电机株式会社 | 盘片装置 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1129902C (zh) | 盘片装置 | |
| CN1253363C (zh) | 纸材供给方法及其装置,以及图像形成装置 | |
| CN1295452C (zh) | 用于自动变速装置的变速控制设备 | |
| CN1783273A (zh) | 盘片装置 | |
| CN1659036A (zh) | 喷墨记录装置 | |
| CN1576095A (zh) | 电动式车辆座椅收纳结构 | |
| CN86100962A (zh) | 磁记录/重放装置 | |
| CN1822159A (zh) | 光盘装置 | |
| CN101079292A (zh) | 盘片装置 | |
| CN1950909A (zh) | 盘片容纳体和信息提供体 | |
| CN1569593A (zh) | 纸币存储单元的纸币移动单元 | |
| CN1637902A (zh) | 盘片装置 | |
| CN100339284C (zh) | 票据自动储存装置 | |
| CN1270320C (zh) | 滑块的加工装置及加工方法和滑块加工用负荷施加装置 | |
| CN1213590C (zh) | 图像读取器和图像形成设备 | |
| CN1231903C (zh) | 存储媒体装载装置 | |
| CN101064149A (zh) | 盘片装置 | |
| CN1213422C (zh) | 存储媒体装载装置 | |
| CN1257505C (zh) | 存储媒体移动方法 | |
| CN1251220C (zh) | 盘片装置 | |
| CN1530887A (zh) | 纸币存储单元的状况检测单元 | |
| CN1860532A (zh) | 盘片驱动装置以及盘片驱动装置的驱动控制方法 | |
| CN1189881C (zh) | 存储媒体装置 | |
| CN1815598A (zh) | 光盘装置 | |
| CN1070778C (zh) | 印刷机的夹紧驱动装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20031203 Termination date: 20160227 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |