CN1310604C - 手柄/把手及其设计方法 - Google Patents
手柄/把手及其设计方法 Download PDFInfo
- Publication number
- CN1310604C CN1310604C CNB028260554A CN02826055A CN1310604C CN 1310604 C CN1310604 C CN 1310604C CN B028260554 A CNB028260554 A CN B028260554A CN 02826055 A CN02826055 A CN 02826055A CN 1310604 C CN1310604 C CN 1310604C
- Authority
- CN
- China
- Prior art keywords
- hand
- handle
- main body
- radius
- palm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims abstract description 62
- 210000003813 thumb Anatomy 0.000 claims abstract description 139
- 210000003811 finger Anatomy 0.000 claims abstract description 129
- 238000013461 design Methods 0.000 claims abstract description 64
- 210000003205 muscle Anatomy 0.000 claims description 50
- 210000005224 forefinger Anatomy 0.000 claims description 47
- 210000000707 wrist Anatomy 0.000 claims description 43
- 210000000623 ulna Anatomy 0.000 claims description 37
- 210000000236 metacarpal bone Anatomy 0.000 claims description 31
- 210000004932 little finger Anatomy 0.000 claims description 27
- 210000000245 forearm Anatomy 0.000 claims description 25
- 210000000988 bone and bone Anatomy 0.000 claims description 20
- 238000005259 measurement Methods 0.000 claims description 14
- 230000033001 locomotion Effects 0.000 claims description 12
- 210000004247 hand Anatomy 0.000 claims description 11
- 230000008093 supporting effect Effects 0.000 claims description 9
- 230000015572 biosynthetic process Effects 0.000 claims description 5
- 230000007246 mechanism Effects 0.000 claims description 5
- 238000013507 mapping Methods 0.000 claims description 4
- 239000000463 material Substances 0.000 claims description 4
- 210000001145 finger joint Anatomy 0.000 claims description 3
- 230000002452 interceptive effect Effects 0.000 claims description 3
- 230000006835 compression Effects 0.000 claims description 2
- 238000007906 compression Methods 0.000 claims description 2
- 241001133760 Acoelorraphe Species 0.000 description 95
- 210000001617 median nerve Anatomy 0.000 description 19
- 230000008901 benefit Effects 0.000 description 18
- 210000002435 tendon Anatomy 0.000 description 18
- 208000003295 carpal tunnel syndrome Diseases 0.000 description 10
- 210000003010 carpal bone Anatomy 0.000 description 9
- 230000007935 neutral effect Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 7
- 238000010422 painting Methods 0.000 description 7
- 238000005452 bending Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 210000003041 ligament Anatomy 0.000 description 6
- 230000009471 action Effects 0.000 description 4
- 210000001367 artery Anatomy 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000009021 linear effect Effects 0.000 description 4
- 206010061218 Inflammation Diseases 0.000 description 3
- 206010024453 Ligament sprain Diseases 0.000 description 3
- 208000028804 PERCHING syndrome Diseases 0.000 description 3
- 208000010040 Sprains and Strains Diseases 0.000 description 3
- 210000003484 anatomy Anatomy 0.000 description 3
- 230000008602 contraction Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000004054 inflammatory process Effects 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 210000005036 nerve Anatomy 0.000 description 3
- 230000001737 promoting effect Effects 0.000 description 3
- 210000001519 tissue Anatomy 0.000 description 3
- 244000007853 Sarothamnus scoparius Species 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000037396 body weight Effects 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000012797 qualification Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000008961 swelling Effects 0.000 description 2
- 208000024891 symptom Diseases 0.000 description 2
- 210000005222 synovial tissue Anatomy 0.000 description 2
- 210000001364 upper extremity Anatomy 0.000 description 2
- 230000009278 visceral effect Effects 0.000 description 2
- 210000003857 wrist joint Anatomy 0.000 description 2
- 208000006820 Arthralgia Diseases 0.000 description 1
- 241001260012 Bursa Species 0.000 description 1
- 0 C1C2=*C1CC2 Chemical compound C1C2=*C1CC2 0.000 description 1
- 241000905957 Channa melasoma Species 0.000 description 1
- 241001166076 Diapheromera femorata Species 0.000 description 1
- 206010049816 Muscle tightness Diseases 0.000 description 1
- 210000000577 adipose tissue Anatomy 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 210000000746 body region Anatomy 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 230000001680 brushing effect Effects 0.000 description 1
- 230000001684 chronic effect Effects 0.000 description 1
- 239000000571 coke Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 210000002808 connective tissue Anatomy 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 210000000852 deltoid muscle Anatomy 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 206010012601 diabetes mellitus Diseases 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000002224 dissection Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000005242 forging Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 210000002758 humerus Anatomy 0.000 description 1
- 208000003532 hypothyroidism Diseases 0.000 description 1
- 230000002989 hypothyroidism Effects 0.000 description 1
- 230000001976 improved effect Effects 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 239000004816 latex Substances 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 235000013372 meat Nutrition 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000004118 muscle contraction Effects 0.000 description 1
- 230000001537 neural effect Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 210000002221 olecranon process Anatomy 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 239000011368 organic material Substances 0.000 description 1
- 230000000399 orthopedic effect Effects 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 108090000623 proteins and genes Proteins 0.000 description 1
- 210000002321 radial artery Anatomy 0.000 description 1
- 238000007670 refining Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 231100000241 scar Toxicity 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 230000035882 stress Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 208000011580 syndromic disease Diseases 0.000 description 1
- 201000004415 tendinitis Diseases 0.000 description 1
- 230000008719 thickening Effects 0.000 description 1
Images


































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3209—Incision instruments
- A61B17/3211—Surgical scalpels, knives; Accessories therefor
- A61B17/3213—Surgical scalpels, knives; Accessories therefor with detachable blades
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/30—Surgical pincettes without pivotal connections
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B60/00—Details or accessories of golf clubs, bats, rackets or the like
- A63B60/06—Handles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25C—HAND-HELD NAILING OR STAPLING TOOLS; MANUALLY OPERATED PORTABLE STAPLING TOOLS
- B25C5/00—Manually operated portable stapling tools; Hand-held power-operated stapling tools; Staple feeding devices therefor
- B25C5/02—Manually operated portable stapling tools; Hand-held power-operated stapling tools; Staple feeding devices therefor with provision for bending the ends of the staples on to the work
- B25C5/0285—Hand-held stapling tools, e.g. manually operated, i.e. not resting on a working surface during operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25G—HANDLES FOR HAND IMPLEMENTS
- B25G1/00—Handle constructions
- B25G1/10—Handle constructions characterised by material or shape
- B25G1/102—Handle constructions characterised by material or shape the shape being specially adapted to facilitate handling or improve grip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B43—WRITING OR DRAWING IMPLEMENTS; BUREAU ACCESSORIES
- B43K—IMPLEMENTS FOR WRITING OR DRAWING
- B43K23/00—Holders or connectors for writing implements; Means for protecting the writing-points
- B43K23/004—Holders specially adapted for assisting handicapped or disabled persons to write
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/08—Brake-action initiating means for personal initiation hand actuated
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/04—Controlling members for hand actuation by pivoting movement, e.g. levers
- G05G1/06—Details of their grip parts
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03543—Mice or pucks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3201—Scissors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8875—Screwdrivers, spanners or wrenches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0042—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping
- A61B2017/00424—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping ergonomic, e.g. fitting in fist
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
- A61B2017/2918—Handles transmission of forces to actuating rod or piston flexible handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
- A61B2017/2919—Handles transmission of forces to actuating rod or piston details of linkages or pivot points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
- A61B2017/2929—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft with a head rotatable about the longitudinal axis of the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2931—Details of heads or jaws with releasable head
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2939—Details of linkages or pivot points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3209—Incision instruments
- A61B17/3211—Surgical scalpels, knives; Accessories therefor
- A61B2017/32113—Surgical scalpels, knives; Accessories therefor with extendable or retractable guard or blade
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B60/00—Details or accessories of golf clubs, bats, rackets or the like
- A63B60/06—Handles
- A63B60/08—Handles characterised by the material
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B60/00—Details or accessories of golf clubs, bats, rackets or the like
- A63B60/06—Handles
- A63B60/10—Handles with means for indicating correct holding positions
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/033—Indexing scheme relating to G06F3/033
- G06F2203/0334—Ergonomic shaped mouse for vertical grip, whereby the hand controlling the mouse is resting or gripping it with an attitude almost vertical with respect of the working surface
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S16/00—Miscellaneous hardware, e.g. bushing, carpet fastener, caster, door closer, panel hanger, attachable or adjunct handle, hinge, window sash balance
- Y10S16/12—Hand grips, preformed and semi-permanent
Abstract
本发明提供了一种手柄或者把手的设计方法和装置,所述手柄或者把手的形状和结构能够填充除了下面的腕管之上的区域之外的手的不同区域。这样的设计方法和装置提供了能被手所使用的不同的支撑和手柄。特别是,所述装置包括通常为靴状的主体或者部分。所述主体或者主体部分包括桡骨部分、尺骨部分和中间部分。此外,所述主体具有远侧(前部)手指侧、近侧(后部)、手掌侧和拇指侧。所述主体也具有桡骨和尺骨侧。这些部分的形状配合手的内表面的不同对应区域。这些形成主体的部分和侧面可以被分开并对本发明的各应用进行单独使用。
Description
技术领域
本发明提供一种手柄或者把手的设计方法和装置,所述手柄或者把手的形状和结构填充手中除了手在下面的腕管面积上的区域之外的不同区域。这样的设计方法和装置提供了能够被手所使用的不同的支撑和手柄。特别是,本申请中所讨论的装置包括通常是靴状的主体。所述主体或者主体部分包括桡骨侧面、尺骨侧面和远端(前部)侧面、近端(后部)侧面、手掌侧面和手指以及拇指侧面。这些部分的形状根据特定的应用与手内不同的对应区域相配合。所述装置的主体可以分为桡骨部分、中间部分和尺骨部分。这些形成主体的部分可以分开,其中的一些可以分别地用在本发明单独应用中。这些部分的一些应用将在其它应用中讨论,其中一些将在本申请中说明。
背景技术
上臂容纳单骨(肱骨)。前臂容纳两个骨(桡骨和尺骨)。手腕具有七个较小的骨(腕骨)。当手腕移动时,近侧三个腕骨与两个前臂的骨形成关节。远侧四个形成一个关节,在那里它们与手的五个掌骨相遇。[“近侧”是靠近躯干,“远侧”是离开躯干]。在手腕发生运动,在那里拇指的基部(第一掌骨)与远侧腕骨相遇。但是,远侧腕骨的关节至剩余的四个掌骨的关节没有运动,因为它们紧密相连。四个掌骨与手指的指骨相遇形成掌骨-指骨(MP)关节。所述拇指具有两个指骨(近侧和远侧指骨),较长的手指具有三个(近侧、中间和远侧指骨)。可移动关节在近侧(MP关节)和中间指骨以及中间(PIP关节)和远侧(DIP)指骨之间形成。腕管(CT)是由腕骨的内表面的三侧和横向腕骨韧带(TCL)的内表面在外侧侧上形成的空间。TCL是近侧手掌下较强的韧带,所述TCL连接桡骨(拇指侧)和尺骨(较小的手指)的腕骨。CT的尺寸通过影响骨尺寸的基因和环境因素调节。
参照图1,图1显示了手100(诸如右手或者左手)的手掌100b的手掌表面100a,具有水平褶皱101和纵向褶皱201以及各手指606、607、608、609和TCL202的位置上的皮肤褶皱603。正中神经是TCL202下的管道。水平褶皱101描绘了MP关节106的近侧部分105并横过MP关节106弯曲的手掌表面100a。纵向皮肤褶皱201存在于手100的桡骨侧301上的手掌肌肉302与手100的尺骨侧401上的小指球肌肉402之间的凹处。纵向褶皱201存在于CT203之上。纵向褶皱201位于拇指801的掌骨(MC)关节107弯曲以相对任一手指606、607、608、609的皮肤中,所述手指606、607、608、609被统称为长指604。指示位于点线203a和203b之间的CT 203的距离由箭头203c指示。
继续参照图1,TCL 202在中心部分最厚,并稳定九个通过CT203的屈肌腱(一个腱屈曲拇指801)。CT203中的腱被形成内鳃囊的滑液薄膜所包围,所述内鳃囊产生润滑物质以允许腱平稳地移动以拉动长指604和拇指801中的骨。位于CT203中的正中神经随臂和手腕运动而拉伸。所导致的问题在于腕运动的极端情况下使得神经和腱在进入CT203时扭结。
肩部是球关节,所述球关节允许上肢在很多方向中运动。肘弯曲以拉(弯曲)或者推动(延展)以及转动前臂和手(手掌向上或者手掌向下)。手掌向上是转动前臂以使得手掌向上。手掌向下是前臂转动以使得手掌向下。腕通过组合这些运动在上下(延展或者弯曲)、侧向(桡骨或者尺骨偏转)以及在多个方向中运动。
拇指801具有五个基本运动。拇指801的第一个运动是屈曲(移动更近),第二个运动是在平行于手100的桡骨侧301的方向中延展(移动离开)。拇指801外展或者外展以在垂直于手掌100b的方向上下移动,这是拇指的第三运动。最后作为第五运动,拇指801也相反或者接触任何长指604。这些运动的组合被称为环行,所述环行在围绕任一方向移动拇指801。
长指604具有三个肌肉组,所述肌肉组独立或者一起工作以屈曲(拉)近侧、中间和远侧指骨。一个肌肉组位于手掌100b中,两个肌肉组位于前臂中。手掌100b中的肌肉是蚓状肌。这些蚓状肌在MP关节106收缩近侧指骨606c、607c、608c和609c。蚓状肌是尺寸相对较小的肌肉。
此外,其它两个较大的肌肉组位于前臂的前部(手掌表面)并被称为表面和深屈肌。表面屈肌靠近前臂的表面,深屈肌位于其下。各屈肌前臂肌被分为子单元,自各子单元每四个腱提供通过CT203的八个腱。表面屈肌的腱连接并拉动(屈曲)中指骨606b、607b、608b、609b。深屈肌的腱连接并拉动远侧指骨606a、607a、608a、609a。深屈肌比表面屈肌大且强。所有肌肉组合用于顺序屈曲指骨并产生不同程度的手指弯曲以抓住不同形状的物体。手中的其它肌肉将手指展开或者将它们拉到一起(外展或者内收)。
当肌肉单元收缩围长放大以拉动其平滑电缆状腱,所述腱进而在关节拉动其骨。指的屈曲量和强度依赖于各肌肉单元的收缩程度。这依赖于肌肉的尺寸。因此,更大的肌肉具有更大的收缩力。最大和最强的前臂肌是深屈肌,所述深屈肌拉动远侧指骨。因此,长指604的远侧指骨606a、607a、608a、609a可以施加最强的夹持力。
人手具有保持、抓住和移动不同尺寸、形状和重量的物体的能力并提供对人体的支撑。手柄和把手是用来协助这些功能的。常用的手柄和把手可以在手杖、自行车手把、磨沙机、电动和气动以及其它工具上,并通常是管状并且尺寸单一。长指骨尺寸不同。中指和环指607、608比食指、小指606和609长。因为尺寸不同,当长指604抓住管状手柄,指尖610在末端不在同一条线上。即,小指609的指尖610在食指606的指尖610之前结束,食指在环指608的指尖610之前结束,环指608的指尖610之前结束,而拇指801与食指606重叠或者靠近食指606。
通常,中指607的中指骨607b、608b以及环指608以及食指606以及小指609的远侧指骨606a、609a沿着管状把手上同一条线施加夹持力。因此,更小的表面屈曲前臂肌拉动中指607、环指608的中指骨607b、608b,而深屈前臂肌拉动食指和小指606和609的远侧指骨606a、609a,其对表面和深屈肌不对称使用。因此,可能导致的问题是拉动手指606-609的不同部分以夹持常用手柄的不同屈肌不能一致工作。
夹持程度依赖于脑信息将一定量的肌肉片断收缩量引导至拉动其指骨的腱。所有肌肉的收缩量决定了总的夹持强度。屈曲前臂肌对手指606-609的不对称使用限制了手100潜在的夹持应用并导致前臂肌拉紧。
通过工具的常用手柄和把手迫使前臂指屈肌这样的不对称使用并对重型装备、机器、电器和其它装置使用,这经常导致问题。这可能不利地压迫手指和腕关节、CT203的容纳物、手100和前臂中的肌肉以及正中神经。这样的压力在常用的手柄被夹持以及相对支持上体中使用时而加剧。
手掌100b和手指606-609上的皮肤以及组织是涉及夹持的另外的一个因素。其包含软、可压缩脂肪组织具有小但是很强的垂直韧带,所述韧带自较深的组织延展到下表面。这些韧带防止手掌表面100a的皮肤滑动。除了缓冲外,手指606-609的皮肤具有脊和凹处(指纹)以使得手100可以在不打滑的情况下逐渐夹紧物体。
而诸如甲状腺机能减退和糖尿病的不同疾病可能影响CT203中的正中神经,本发明的设计方法和装置涉及防止或者减小对手100和腕的外伤以及物理扭伤。当手腕延展以及手指606-609被强力夹持,CT203中的正中神经在TCL202之下受到压缩并变扁。这在诸如反复夹持方向盘、手磨沙机重复震动、手提钻的重复压缩以及其它强力活动中会发生。这些活动刺激并使正中神经以及包络围绕CT203中腱的滑液组织发炎。发炎的滑液组织可能肿胀以压迫CT203中的正中神经。由于发炎可能形成伤疤,增加了CT203中的正中神经的摩擦。当CT203中的容纳物发炎并且手腕弯曲,CT203中的压力以指数增长。老化和重复受伤典型地导致TCL202变厚,这减小了CT203的尺寸。小尺寸手腕更容易重复扭伤并导致腕管综合征(CTS)。CTS症状包括手腕疼痛,手指发麻逐渐丧失感觉,手掌肌肉弱化,这是由于CT203肿胀的容纳物压迫正中神经。
在人将其重量依靠和放置在手掌100b或者手指606-609同时抓住常用手柄以支持上体时,手腕用作支点。在此位置,手腕通常不受支撑。在这样的条件下手腕最大程度延展(往后弯曲)并作为支点以支持上体重量,尤其在肘是直的时候。用此方式支撑手也使得手掌100b变平。将手100放置在纵向褶皱201上、手掌肌肉302和小指球肌肉402之间的凹处中,会把上体的重量直接放置在TCL202上并将压力传输到直接位于其下的正中神经。这些位置经常产生CTS症状,而这是可以通过合适的手柄或者把手得以防止或者减小的。
在手100的各部分协调工作时能获得很好的效率。任何手柄或者把手的目标是为了提高这样的效率,本发明也不例外。有效的手柄或者把手设计必须将手柄100维持在舒适的位置,并且也避免将大的外力施加到TCL202上并减小CT203中的内压。任何手柄或者把手设计的进一步的目标,当然也是本发明的进一步目标,是为了方便手100和前臂肌肉的功能,这样它们可以协同工作。此外,这样的手柄或者把手设计,以及本发明的进一步目标也必须有利地减小保持手柄或者把手典型所需的夹持强度量。当较小的夹持强度用于保持手柄或者把手,CT203的内压可以减小。完成这些目标的手柄或者把手必须减小CTS的发生率和重复扭伤病症。
有许多手柄专利,这些专利通过凸状和填充手掌和小指球肌肉区域指尖的凹陷(凹处)而配合手,这将压迫正中神经。一些具有凹陷配合掌骨和指垫。例如,美国专利No.6,142,918列出杠铃系统。美国专利No.4,828,261列出运动设备用手柄。美国专利No.5,556,092是具有凹陷的圆形并列出人类工程学手柄。美国专利No.5,979,015列出人类工程学把手和夹持方法,但是指尖没有结束在一起来平衡夹持。
美国专利No.5,806,091是把手辅助物。这是一个放置在长指网接触手掌的皮肤之处的网孔之下的垫。其通过橡胶带或者环保持在适当的位置。所述装置加强了长指横跨手柄的网孔的稳固性,如棒球球棒上所示那样,但是正中神经压力问题仍然存在。
美国专利No.5,873,148题为人类工程学手柄系统,由四个独立件制造,所述独立件沿着基部手柄上的轨道滑动。各件具有槽以容纳手指。两个中间件的周长比外部和内部件要大。
美国专利No.5,031,640题为防止腕管综合征的垫。其提供了一种垫住手掌区域、MP关节和小指球区域的手套,并且其在CT区域中是空的。
美国专利No.6,183,400题为闲置夹持手柄。其设计用于在提升重量时减小夹持力。“掌根”(隆起物)被提供以配合手的尺骨侧。其延展到CT并在正中神经之上的纵向褶皱停止。带围绕手背部分以在合适的位置保持手。拇指围绕扁平底部。把手围绕提升重量的杆铰接。“掌根”弯曲并下凹。
美国专利No.5,829,099题为通用人类工程学手柄。其外形与手的解剖结构相匹配并据称配合解剖放置位置。
美国专利No.5,761,767中的手柄并入平表面,即“掌根”,其自管的上表面延展以支撑手的尺骨的一半。手柄的目标是为了在通过使用“钩状把手”提高重量时限制手腕的运动。
美国专利No.5,339,850公开了离床活动工具用矫形把手、工具和其它应用。所述把手包括延展通过纵向褶皱的“掌根”。
发明内容
一种手用装置,包括:主体,所述主体是大体的靴形主体,所述主体包括桡骨端和尺骨端;以及至少主体的一部分包括至少一个表面部分,所述至少一个表面部分被安置用于分别在主体上放置至少一个手的对应部分,主体的各部分包括至少一个用于在主体上放置手的对应部分的表面部分,所述手的对应部分被放置与主体的桡骨端和尺骨端相关用于将主体和手的至少一个区域形成配合关系,而主体没有在手下面的腕管之上的手的区域上设置大的压力。
一种设计与手的尺寸对应的手柄的方法,包括步骤:将手设置在一个位置,使手的长指的末端大体对齐;从手的水平褶皱的桡骨侧至尺骨侧测量跨过手的长指的掌骨的距离,由此限定手柄的长度;映射在手的拇指的基部的远侧并沿尺骨方向行进在手的纵向褶皱之前结束的第一条线;映射从手的尺骨侧在手的尺骨侧上的豌豆骨的远侧并朝着手的桡骨侧行进大约2/3的手的小指球肌肉区域的第二条线;映射自手的手掌肌肉区域延展至手的水平褶皱的小指球肌肉区域的第三条线;将第一线、第二线和第三线和横过手的手掌的第一纵向线以及第二纵向线相连接,由此限定具有手的对应尺寸的手柄的近侧,而手柄不会在位于手的腕管上的手的部分上设置大的压力。
一种设计手柄/把手的方法和装置,并基于夹持的手的功能解剖所衍生的限定解剖位置。所述设计方法和装置补偿了指长的差异。所述方法在尖部边靠边处于同一条线上时使用掌上和长指上的曲线,而拇指与拇指和食指之间的空间相对。使用此方法制造的诸如手柄和把手的装置充分利用手和屈曲肌。所述方法产生并且所述装置也提供上体支撑,而手放置在肉体的手掌和小指球肌以及掌骨上,而没有压横向腕骨韧带和正中神经。
此设计的手柄的优点是其由于中间部分的凹陷近侧部分而不接触TCL上的皮肤。因此TCL没有受压,在夹持过程中或者使用此设计的手柄作为支持时,也没有压力传输到CT区域的容纳物。
另外的优点是其维持手指和手掌的自然弧形以使得手的自然容纳与其相符。在适应自然手解剖过程中,手柄或者此设计在保持或者放置在其上时变得更加舒服。
另外一个优点是手更多部分接触手柄。常用管状把手在长指、横过手掌和拇指的掌骨接触手。而此设计的手柄除了长指、掌骨区域以及拇指之外,在拇指和食指的肉体手掌肌以及手的尺骨侧的扁平小指球肌区域增加了接触。这样,此设计用于保持或者夹持的手柄接触区域增加的更大。
当作为自行车支持使用时另外的优点是更大的接触区域在横过掌骨和桡骨以及尺骨肌区域支撑上体重量。但是,常用手柄在拇指和食指以及掌骨指尖的肉体区域承载重量,而手指紧紧保持所述常用手柄。常用手柄上没有放置手的尺骨侧的部分。
另外的优点是长指的挤压作用被指引到手掌和手的更宽的部分。在拇指相对食指和中指倾斜拇指、手指和中指的尖部以挤压尺骨肌肉时,本设计的手柄的桡骨侧填充所形成的空间。所述手柄的尺骨侧迫使小指和环指挤压桡骨肌。手柄的尺骨侧迫使小指和环指挤压尺骨肌。夹持常用手柄的力涉及相对手掌挤压管的长指,尤其是相对掌骨-指骨关节。
另外的优点是长指的尖部中止在同一条线上。这样放置相似的肌肉以控制相似的骨。挤压最强的肌肉是到达指尖的那个。这样,此设计的手柄允许最强的肌肉作它们最有效的工作。(这与常用的手指没有结束在一起的手柄不同,其中用不同的肌肉来进行挤压)
另外涉及当使用此设计的手柄时长手指中止在相同的线上的优点是前臂和手肌可以其最大的潜能工作。这个优点被增强是因为拇指通过相对食指和中指而加入,而不像常用手柄那样拇指重叠长指。
另外的优点是所有的手指协同工作以施加最大的努力,而所述手的相对部分彼此对抗以平衡夹持力。这就像在手的手掌中挤压蛋一样。当平衡时所述力不能将其分开。
另外的优点是由于更大外形的夹持表面只需要更少的前臂肌施力。
另外的优点是由于夹持只需要更少的力而使得提高物体更加容易,这样主要用耐重力的肩和肘肌肉(三角肌、二头肌等)就可以实现提升。
另外的优点是使用这样的手柄不需要危害或者扭曲供给到手中的肌肉的动脉。这是因为这样的手柄不接触TCL和下面的CT(桡骨动脉横过其)或者位于豌豆骨上的Guyon管(尺骨动脉深入以提供手的结构)。
另外的优点是其不危害、压缩或者扭曲手中的神经。
这是因为这样的手柄不接触TCL和下面的CT(横过正中神经)或者豌豆骨(404)上的Guyon管(尺骨神经沿着尺骨动脉往下深入以使手受神经支配)。
使用此发明的手柄的另外的优点是CT中容纳物更小的张紧和更小的压力。这样的手柄相对常用管状手柄使得腱在CT中同步移动,所述常用手柄中迫使腱的异步运动增加了肌肉的损伤和CT中腱的疲劳。
另外的优点是对表面屈肌腱较少的挤压、扭曲或者正中神经刺激,所述表面屈肌腱更靠近TCL和CT中的正中神经。
另外的优点是诸如动力磨沙机、或者冲击手提钻以及扳手等震动装置的力被传输到肉体手掌和小指球肌以吸收能量,并且没有引导到CT。
最完满的优点是此设计的手柄基于上述提到的优点将减小对腱、粘液囊、关节、前臂肌和正中神经的剧烈和慢性刺激、外伤和疲劳。因此,可以预期结果将是降低的CTS发生率和使用此设计的手柄或者把手的人减少的重复疲劳综合征。
本发明的一个目标是提供一种基于上述目标的手的测量研制手柄设计的方法。所述测量对应手的区域和表面,就如同在保持手柄的位置中。
本发明的一个目标是提供一种手柄或者把手设计方法和装置,所述手柄或者把手不会将较大的压力放置在CT区域上。
本发明的一个目标是提供一种手柄或者把手设计方法和装置,所述装置与手的支撑区域具有更大的接触。
本发明的一个目标是提供一种手柄或者把手设计方法和装置,以最优化使用拇指和长指的前臂屈曲肌,以及平衡用于夹持、提升、拉动的力。
本发明的一个目标是提供一种手柄或者把手设计方法和装置,所述装置在手腕处于中间位置时不会将较大的压力放置在CT区域上。此中性手腕位置在手腕没有过分屈曲或者朝桡骨或者尺骨方向偏移时存在。
本发明的一个目标是提供一种手柄或者把手设计方法和装置,当手强力夹持手柄或者把手时减小或者基本消除CT中所增加的压力。
本发明的另外的一个目标是提供一种手柄或者把手的设计方法和装置,用于将长指的尖部放置基本对齐以最优使用深屈肌。
本发明的另外一个目标是提供一种手柄或者把手的设计方法和装置,当使用时将上体的重量散开到手的掌骨指骨关节的区域以及至手的桡骨和尺骨侧,诸如当手腕维持在中间位置时。
本发明的另外一个目标是提供一种手柄或者把手的设计方法和装置,与常用手柄或者把手相比使用了减小的把手强度。
本发明的另外一个目标是根据其目的或者使用提供不同尺寸和形状的手柄以减小不同应用所需的把手强度。
本发明的另外一个目标是提供一种与不同手尺寸相关的手柄以实现本发明的上述和其它目标。
本发明的另外一个目标是提供一种手柄,由此手柄的尺骨部分的宽度小于手的小指球肌的宽度。
根据本发明的另外一方面,根据本发明的装置的远侧可以包括作为在所述装置上放置长指的参考的升高平面。
根据本发明的另外一方面,本发明的装置可以包括所述装置的手掌侧上的槽或者扁平区域,以形成MP关节的支撑,由此长指围绕诸如手柄的所述装置的远侧部分延展。
根据本发明一个特定方面,手柄的壳可以在前部打开或者通过其主体的中心,并可以变形,这样自利用手柄的工具的延展可以固定在手柄内部或者与手柄一起固定以用于和手柄或者把手用互换工具中。
根据本发明的另外一方面,手柄的周围可以组合到手套中以使得手柄在不同的应用中提供多种使用方法。
根据本发明的另外一方面,手柄可以分为不同的部分,这样这些部分为特定的功能而分别应用,诸如行李把手、触笔等。
本发明的另外的目标是提供放置手柄或者把手的方向,这样与手相关的手腕被放置在中间位置。中性手腕位置通过安置两个相交平面实现,这样相交平面之一通过前臂,另外一个相交平面自拇指的基部通过手指,这样两个相交平面之间的角度在大约十度至大约四十五度的范围中,理想地当手处于变化的T位置时小于或者等于三十度。
因此,在本发明的手柄或者把手中长指端彼此相邻的同一条线上,手柄与纵向褶皱没有接触。此外,掌骨呈弓形,手柄的尺骨侧不接触纵向褶皱,而拇指被放置与拇指和中指指尖的空间相对。在本发明的手柄或者把手中,手柄的尺骨侧具有与手的尺骨侧接触的延展区域,手柄的桡骨侧上的手掌肌的结缔组织空间与桡骨部分的近侧完全接触。
同样,在本发明的手柄或者把手的设计方法和装置中,所述设计方法和装置基于手在功能或者夹持位置的测量,手柄尺寸理想地基于拇指尖部和食指以及长指尖部之间的距离。
此外,在本发明的手柄或者把手的设计方法和装置中,手柄的手掌和远侧(前部)部分的形状以“焦炭瓶曲线”的形状形成,尺骨侧具有笔桡骨侧更小的弧形,并提供这样的形状:所述形状凸出以压较长的中指和环指以和食指以及小指结束在相同的线上。
此外,在本发明的手柄或者把手的设计方法和装置中,主体三分为桡骨、中间和尺骨部分,它们可以独立使用或者一起使用。这样的多样性允许各部分的侧面可以连接到工具。同样,本发明的手柄或者把手的主体可以沿着通过手掌至拇指侧的平面、或者沿着通过本发明的手柄或者把手的近侧至远侧的平面二分或者分开以进行不同的应用。此外,主体可以处于不同的应用或者目的沿着对角、倾斜或者切线平面切割。
同样,在本发明的手柄或者装置中,手柄或者把手的主体的一侧可以是镜像,或者与另外一侧不同,这有赖于手柄或者把手的使用或者目的。
因此,本发明提供了手柄或者把手用设计方法和装置,所述手柄或者把手提供的形状和结构填充除了下部腕管之上的面积中的区域外的不同区域。这样的设计方法和装置提供了不同的支撑和手柄,以被一只手使用。尤其是,所述装置包括通常是靴装置主体或者部分。所述主体或者主体部分包括桡骨部分、尺骨部分和中间部分。此外,所述主体具有远侧(前部)手指侧,近侧(后部)、手掌侧和拇指侧。所述主体也具有桡骨和尺骨侧。这些部分的形状用于配合手的内表面的不同对应区域。这些形成主体的部分和侧面可以被分开并使用在本发明的单独应用中。
附图说明
本发明的前述和其它方面以及特征参照附图以及结合详细的说明书变得更加明显,其中相似的数字标识表示相似的元件,其中:
图1显示了手的手掌透视图;
图2示出了图1的手在中间位置;
图3A、3B和3C示出了手的桡骨侧处于不同“T位置”的对应视图,拇指和长指相对,图3A示出了拇指和长指接触,图3B和3C分别说明了拇指和长指以两个距离分开;
图4A和4B说明了图1中的手柄根据本发明限定在“T位置”中,所述位置朝向手指的内表面,并自前臂透视所示安置离开主体;
图5A、5B和5C示出了不同的“T位置”中的手的桡骨侧的对应视图,拇指和长指相对,图5A说明了拇指和长指接触,图5B和5C分别说明了拇指和长指以两个距离分开,图5A、5B和5C说明了自拇指的内边延展通过长指的平面;
图6显示了手的手掌表面的视图,显示了长指褶皱的曲线布置和T位置中的手掌弓形,拇指伸展;
图7示出了手的手掌表面在T位置中的视图,拇指延展,并说明了手上所划的线以标示本发明的把手或者手柄应该接触手的位置;
图8示出了本发明的手柄相对手的手掌表面在T位置中的被支撑区域;
图9A和图9B是根据本发明的手柄的两个典型实施例的透视图;
图10A和图10B是图9A和图9B的两个典型实施例的各侧视图,图10C和图10D分别是图9A的手柄的实施例的远侧(前部)视图和近侧(后侧)视图。
图11A、11B和11C是轮廓图,图11A和图11B分别说明了图9A和图9B的两个典型实施例的桡骨(顶部)视图,图11C说明了本发明的图9A和图9B的手柄的尺骨(底部)视图;
图12说明了本发明的图2中的手柄的实施例的主体,被分为桡骨部分、中间部分和尺骨部分;
图13A和图13B分别示出了图9A中的手柄的侧视图和远侧(前部)视图;
图14A、14B和14C分别说明了本发明的手柄的桡骨、中间和尺骨部分,并配合手的对应部分;
图15A和图15B是本发明的手柄的实施例的横截面视图,图15A说明了掌骨和手掌相对拇指的远侧指骨的关系,图15B说明了拇指的近侧指骨和长指的关系;
图16A、16B、16C和16D分别说明了本发明的实施例的手柄的视图,二分或者分开后,图16A表示本发明的实施例的右半部分,图16B表示这样手柄的左半,图16C表示这样手柄的远侧(前部)部分,图16D表示本发明手柄的近侧(附近)部分;
图17A和17B分别说明了基于本发明手柄设计方法所产生的手柄的桡骨剖面视图,图17A说明了手指屈曲,图17B说明了手指延展;
图18说明了自拇指的基部通过长指的平面A和通过桡骨的中心的平面B相对使用本发明的手柄的手柄中性手腕位置的相交位置;
图19A示出了平面A和平面B自保持本发明的实施例的手柄的手的尺骨侧透视关系,图19B示出了在手放置到本发明的手柄上并且手腕处于中间位置时的手的尺骨侧的关系;
图20说明了本发明的手柄的另外的实施例,所述手柄可以沿着轴滑动并可以被调整以在手柄沿着所述轴滑动时形成手腕和手的彼此中性的位置;
图21A说明了远侧(前部)视图,图21B说明了本发明的手柄的另外的实施例的侧视图,其中手柄可以在不同的方向中调整角度或者旋转;
图22A-22E说明了用作挤压装置的本发明手柄的不同的实施例,图22A示出了手闸的侧视图,图22B说明了手闸的远侧(前部)视图,图22C说明了透视图,图22D说明了手柄和图22A中的手闸相配合的透视图,图22E说明了本发明的具有铰链端的手柄示例,诸如用作钉书机,图22F说明了本发明的手柄示例,包括具有弹簧的轨道,诸如用作手练习机;
图23A-23I说明了本发明的手柄与不同的应用一起使用的手柄的不同实施例,可以如图23A和23B中那样和轴一体形成,以及如图23C、23D、23E中的铲连接,和用于图23F中杠铃、用于图23G中所示引体向上杆一起使用,如图23H中所示连接到滑雪杖,以及如图23I中所示连接到扫帚的手柄;
图24A-24D说明了使用本发明的手柄的其它实施例,诸如使用图24A中所示的螺丝起子中转动,以及当保持在手中用于如图24B所示转动手柄,如图24C所示与按钮或者开关的手柄用于功能性控制多个位置中的至少一个,如图24D所示与手套中的开口槽一体形成;
图25说明了本发明用作锯子的手柄的另外的实施例。
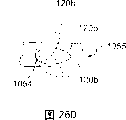
图26A-26D说明了本发明的手柄其它实施例,如图26A中所说明的用于步枪手柄,图26B中所示用于一个装置前后枢转运动,图26C中所示侧至侧枢转运动,以及图26D中所示的转动组合;
图27A-27F中示出了本发明的手柄用作计算机鼠标或者交互装置的另外的实施例,图27A中说明了拇指侧轮廓,图27B中说明了上部或者桡骨轮廓视图,图27C说明了与手配合的拇指侧轮廓图,图27D中示出了与手配合的上部或者桡骨轮廓视图,图27E中示出了长指侧视图,以及图27F中示出了与手配合的长指侧视图;
图28说明了本发明的手柄用于方向盘或者引导装置的另外的实施例;
图29A和图29B说明了本发明的手柄用作笔、铁笔、或者手持装置的另外的实施例,图29A中示出了与手配合的桡骨视图,图29B示出了拇指侧视图;
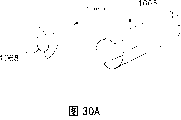
图30A-30E示出了本发明的手柄用作装置的其它实施例,这样手柄配合在手的手掌弓形中,图30A说明了稳定CTS用手腕的支具,图30B说明了图30A中的支具与手配合,图30C说明了前视图,图30D说明了具有本发明的手柄的漆刷的侧视图,图30E说明了图30C和图30D的漆刷的手柄配合在手的掌弓形中;
图31说明了本发明的手柄用作行李拉手和箱的手柄的另外的实施例;以及
图32A、32B和32C说明了本发明的手柄用于抓、拧或者切的其它实施例,图32A说明了这样的手柄用作镊子型工具中的手柄,图32B说明了手与图32A中的手柄相配合,图32C说明了与图32A中的手柄一起使用的工具。
具体实施方式
为了更清楚和简洁地说明本发明的主题,下述定义意在对下述说明书中的特定的术语的含意提供指引。同样可以理解的是此处所用的措辞和术语是出于说明的目的,而不是意图限制。下述部分与背景信息中所描述手的区域相关并参照了图1。
中间位置——“N位置”
图2说明了右手处于中间位置。此位置是处于休息的解剖位置。其被称为中间位置或者“N位置”。此通用的人手图样与肩膀和肘休息位置以及腕骨、掌骨和指骨彼此角度的方式在上肢垂直悬挂休息时有关。图2中所示的手100自手掌100b透视如同其悬在身体的侧面,由此基本消除肌肉收缩。在“N位置”,手100的桡骨(拇指)侧301朝主体自然转动大约30度,并在“N位置”既没有基本屈曲也没有延展。远侧腕骨角度偏离近侧腕骨,这样手100好像稍微在手腕处延展。拇指801相对地面具有一定的角度,长指604很舒适地屈曲。长指606、607、608、609垂下,拇指801的远侧垫822靠近或者放置在拇指606的尖部610和中指607之间。中指607、环指608和小指609的指尖610逐步放置更靠近手掌100b的手掌表面100a。食指606的尖部610远离手掌100b,并比中指607屈曲的少点。皮肤在水平褶皱101折叠,使得长指604看似比手100平放时更靠近纵向褶皱201。
当手处于“N位置”时在水平褶皱101所形成的凹度被称为掌弓102,并显示在图2中。手掌肌肉区域302和小指球肌肉区域402的肉体表面靠近掌弓102。水平褶皱201和纵向褶皱201比手100放平时更靠近“N位置”。
前屈或者“P位置”
前屈或者“P位置”与上述“N位置”不同,在前臂升高并转动(手掌转向下)时发生,这样手100的手掌侧放置在桌子上,手腕维持在中间位置。拇指801的桡骨侧平放,其尖部610接触食指606的桡骨侧。在“P位置”,长指屈曲程度稍大,环指608和小指609比食指606和中指607屈曲大,长指604的尖部610在被诸如桌子的平表面支撑时彼此基本呈线性关系。
掌心朝上或者“S位置”
“S位置”在前臂升起并翻转(掌心朝上)时由“P位置”获得,这样手掌100b朝上,同时保持上述“N位置”。
“T位置”
在图4A中所示的“T位置”通过自图2的“N位置”并排彼此移动长指606、607、608、609获得,这样它们的尖部610当手指屈曲时在相同的水平基本对齐。接着拇指801被移动,这样其尖部610接触食指606与长指607之间的空间600。通过打开拳头,将中指604的指尖610对齐以及将拇指801的尖部610相对食指606与中指607之间的空间也可以获得相同的位置。
长中指607的指甲602和环指608被显示,因为中指607和环指608屈曲的更多以对齐食指606和小指609。
图4A中所示另外的凹度在图4A中虚线所示的指杯限定。其在长指604屈曲以在“T位置”中对齐时形成。
中指607和环指608的远侧(靠近端部)指褶皱603在图4A中不可见,而在图1中可见,因为它们的远侧指骨607a和608a直接朝图4A中所示的观察者方向放置。
图3A、3B和3C以及图5A、5B和5C显示了手100在不同的“T位置”中桡骨侧301的对应视图,拇指801和长指604相对,图3A和5A说明了拇指801和长指604接触,图3A和图3B、5B和图5C分别示出了拇指801和长指604以两个距离相分离,图5A、5B和图5C说明了自拇指801的内边通过长指604的平面A。
图3A、3B、3C、5A、5B和5C说明了在拇指801接触或者自长指604以一定的距离分开时上述“T位置”提供长指604的指尖610仍然保持基本线性对齐。
现在继续参照图6、7和8,本发明提供了一种确定手的内表面的尺寸的设计方法以研制本发明的手柄或者把手的尺寸和形状。
手的尺寸落入组中,允许尺寸形成(例如足尺寸和鞋尺寸)。这样可以收集确定不同手位置的尺寸组。30个男性和30个女性的右手子桡骨侧301指手100的尺寸侧401横过水平褶皱101测量。测量(以0.5cm增量)范围对男性为8.5-12cm,对女性而言是7-9cm。
在确定手的内表面的测量的设计方法中,参照图6,虚线605a、605b和605c所示的曲线可以自手100的桡骨侧301画到手100的尺骨侧401。由虚线102a所示的另外的曲线可以在手100处于“T位置”中时横过手100的掌表面100a的掌弓102画出。
图6也示出了三条延展横过长指604的指褶皱603的线605a、605b和605c,曲线102a延展横过掌弓102。线605a、605b和605c弯曲以与指杯(finger cup)601一起弯曲。许多平行线自线605a开始以不同的间距可以从远侧手指皮肤褶皱603自桡骨侧301至手100的尺骨侧朝向近侧水平桡骨线108在拇指801的基部801a在箭头P的方向中画出。这些平行线也自近侧水平桡骨线108连续至近侧水平尺骨线109的端部,所述近侧水平尺骨线109在豌豆骨404的远侧。
连接这样的平行线形成与手100的表面解剖体的镜像表面。手100表面的尺寸随人而变。但是,手100的这样的表面的基本形状基本相同,尽管表面面积可能变化,而不管手是小、大、宽或者窄。
上述手100的表面的轮廓绘图的测量可以确定本发明的手柄与手100的内表面镜像的尺寸和形状。
研发本发明的手柄或者把手的尺寸的细化测量参照图7说明。图7示出了自手100延展的拇指801以及在“T位置”中对齐的长指604。三条线311、211和411横过手掌100b的近侧部分以限定由基本在图7的虚线内所示的基本区域所指示的中间部分或者中间空间211。水平桡骨线311在拇指801的基部801a的远侧,并对应图6中近侧水平桡骨线108。水平桡骨线311朝手100的尺骨侧401行进至纵向褶皱201的端部桡骨。水平尺骨线411横过豌豆骨404的区域远侧的手100的尺骨侧401,以朝手100的桡骨侧301大致横过小指球肌区域402的2/3而行进。水平中间线211横过手掌100b并自手掌肌区域302在水平褶皱101延展至小指球肌区域402。纵向桡骨线312将水平桡骨线311的最内点连接至水平中间线211的桡骨侧。纵向尺骨线412将水平尺骨线411的最内部分连接至水平中间线211的尺骨侧。
这样,图7示出了将根据本发明的设计方法采取测量以确定手柄用手的尺寸的区域。所述区域的宽度为自桡骨侧301至手100的尺骨侧401,所述区域基本由图7中的虚线所指示并横过掌骨所取。从图7中可见,所测量的手100的表面区域不接触手掌表面100a在TCL202之上的区域的中间空穴221,而手杯601和掌弓102的区域如图4A所示在手100处于“T位置”保留,所述测量表面区域由线605a至由线311、312、211、412和411所限定的近侧边界之间的区域所限定。
如图7中所示,横过手掌100b的MP关节103的宽度确定了根据本发明的设计之手柄的主体长度。主体的长度可以包括部分扩口,所述扩口在手100的桡骨侧301和尺骨侧401之外,所述手紧贴食指606和小指609以防止手100滑动或者在配合本发明的设计的手柄时侧至侧滑动。
现在参照图5A、5B和5C,说明了根据本发明的设计方法的另外确定手尺寸的测量。图5中所示的平面A在拇指801的基部801a近侧水平线桡骨侧108接触手掌肌区域302,如图6所示,并通过长指604的内(手掌)表面604a。图5A、5B和5C显示了T位置的三个变化的手100的桡骨侧301的视图。图5A说明了手100的桡骨侧301,拇指802的尖部610接触拇指606和中指607的尖部610。图5C也显示了拇指801自长指604最大展开。图5B显示了拇指801自相对的长指604的中间位置分离。在图5A、5B和5C所述的所有位置中,拇指801屈曲并在拇指606和中指607之间的空间600相对,长指604的尖部610基本线性关系对齐以保留指杯601和掌弓102。
现在参照图4B并参考图5A、5B和5C,当手100的尺骨侧401放置在平表面S上,手处于“T位置”,平面A在垂直于桌子的平表面S上落下,而不接触手100的尺骨侧401。通常,当手100平放在其背表面(后部),手掌肌区域302比小指球肌区域402高,因为手掌肌块(bulk)比小指球肌块要大。平面A在手100放置在小指609的尺骨侧401上时基本更远离小指球肌区域402,而手100处于“T位置”中。这是因为手掌肌区域302在拇指801移动以相对长指604以及手100的桡骨侧301朝主体倾斜(手掌朝下)时将平面A推向前。
继续参照图4B,两个箭头C之间的位置所指示的平面可以在与平面A垂直角处垂直于表面S通过以恰在豌豆骨404的远侧达到手100的尺骨侧401的近侧水平尺骨线109。本发明的手柄或者把手最后接触小指球肌区域402的位置是在两个箭头C在近侧水平尺骨线109与小指球肌区域402相遇的位置所指示另外的平面。基于上述本发明所描述的设计方法的手柄尺骨侧可以拉直以促使手柄100的桡骨侧301朝向主体转动。这将前臂维持在中间位置中,在中间位置稍微转动并将手100的桡骨侧301朝向主体放置。
由两个箭头D之间的位置所指示的第三平面可以从平面A画到水平中间线211。由两个箭头D之间的位置所指示的此平面标示了本发明中间部分的近侧位置,所述近侧位置接触手100的手掌100b。
参照图4B,由上述图4B所述的平面所形成的边界在手处于“T位置”中通过连接四个表面来确定时可以用于测量本发明的设计的手柄的一半。三个表面是平面的,一个是弯曲的。第一平表面通过平面A形成。第二平表面通过表面S所形成的平面形成,在表面S放置手100的尺骨侧401。第三平表面通过E所指示的平面来形成,E所指示的平面接触手100的桡骨侧301避过并平行于表面S。
第四或者弯曲表面是手100的内表面,在所述手100的内表面,平面A与虚线X所指示的长指604的内表面604a、桡骨水平线311,以及自平面A延展至箭头C所示的水平尺骨线411的垂直平面、以及自平面A至中间水平线211垂直的箭头D所示的第三平面相交。
由于一只手100是另外一只手100的镜像,自上述边界获得的设计数值的表面或者体积图对一只手100反映为正值,而对应另外一只手100为负值数据,而负值的绝对值等于对应的正的数据值。自所述表面或者体积图添加对应正和负数据的绝对值,这提供了本发明的设计手柄的尺寸,所述手柄在任一只手100处于“T位置”时配合所述任一只手100。使用表面或者体积图对设计本发明的设计手柄的模具提供了信息,所述手柄配合任一只手100。
此外,在本发明的设计方法中,相对图4B所述的手掌表面100a的测量可以使用分别在图5A、5B和5C中所示的三个T位置在三个或者更多测量位置进行。对诸如对小尺寸手柄(图5A),图4B中的这样如上所述的第一测量通过拇指801的尖部610接触食指606和中指607之间的空间600进行。对诸如对中间尺寸手柄(图5B),图4B中的这样的如上所述的第二测量通过拇指801的尖部610自长指604的尖部610大致半途展开。对诸如较大尺寸的手柄(图5C),关于图4B中的如上所讨论的这样的第三测量在拇指801的尖部610自长指604的尖部610最大展开的情况下进行。从图5A、5B和5C中可以看出,平面A在拇指801和长指604展开时朝长指604的尖部610前进。因此,由于自长指604的内表面604a和手掌表面100a所形成的手100的曲线表面110的形状与拇指801自长指604在“T位置”中展开相关,然后手100在“T位置”中的测量体积的尺寸也发生变化,所述尺寸参照图4B的讨论测量。这样,本发明的设计手柄的特定实施例的形状与拇指801自长指604的展开相关。
现在继续参照图17A和图17B,基于“T位置”说明了利用本发明的设计方法的不同手柄形状的决定因素。对手100而言,此决定因素基于在图17A中所示的中间PIP关节111a由角度N1以及在图17B中由角度N2所示的角度屈曲,并基于在图17A中由角度N3所示的长指604的远侧PIP关节111c以及图17B中由角度N6所示的屈曲角度程度。此外,此决定因素也基于图17A中由角度N7所示的以及图17B中由角度N8所示的MP关节106的屈曲角度。因此,这些其它确定因素提供了诸如手柄H1、H2根据本发明的设计方法基于各角度N1至N8的屈曲角度对应的手柄形状,所述确定因素确定手柄H1、H2的手掌部分、拇指部分、手柄的远侧(前部)部分和手柄的远侧(前部)部分之间的各个距离。
在这方面,通常在PIP关节111a的更大的屈曲产生本发明的设计方法的手柄,所述手柄自手柄的远侧(后部)部分至手柄的远侧(前部)部分更短,诸如图17A中所示的手柄H1。作为推论,通常在中间MP关节111a更小的屈曲产生本发明的设计方法的手柄,其从手柄的近侧(后部)部分至手柄的远侧(前部)部分较长,从手掌部分至手柄的拇指部分要长。这样的手柄H2显示在图17B中。同样,使用此方法设计的手柄也可以更大以补偿皮肤和皮下组织收缩。
现在参照图18,图18说明了使用本发明手柄的手的中间手腕位置的关系。图18显示了平面A和平面B的相交,所述平面A自拇指801的基部801a通过长指604,所述平面B自肘304至手腕204通过桡骨303的中心,其被用于确定中间手腕位置。
进一步说明图18,在手腕204在中间位置时,平面B自肘304的肘突303a通过桡骨303的中心以延展通过手腕204深入TCL202的远侧部分并超出长指604。在手腕204处于中间位置时平面B横过长指604的位置依靠在拇指801和长指604之间的展开位置,如图5A、5B和5C所示。平面B与长指604相遇,所述长指在手100处于上述“T位置”时基于本发明的设计方法为了更大的手柄更靠近它们的指尖。
继续参照图18,平面A和平面B之间的角度W必须理想地处于大约10度至40度之间以当手100处于“T位置”时将手腕204维持在中间位置。角度W在拇指801和长指604展开时更靠近20度,角度W在拇指801和长指604相对时更接近30度。
两个平面(平面A和平面B)之间适当的角度关系提供最佳的角度W,以促进限制手腕屈曲和延展,并促进防止CT203中的正中神经扭结,同时保持本发明的手柄。这种角度关系通常对本发明的小手柄忽略,因为在此情况下,平面A与平面B可能重合。但是,诸如自行车型手柄的本发明的支撑型手柄的平面A的位置不必平行于地面或者参考平面R。
现在参照图19A和图19B,诸如手柄H的手柄位置依赖于平面B和地面或者参考平面R所形成的角度。如图19A和19B中所示,平面B和地面或者参考平面R所形成的垂直角度X越大,手柄H的近侧部分相对地面或者参考平面R更高。因此,本发明的设计方法的手柄用作支撑型手柄时,必须被放置使得在用户的前臂103内平面A与平面B之间的角度W(如上相对图18所述)根据平面B和地面或者参考平面R之间所形成的角度将手腕204保持在中性位置。
根据本发明的手柄的不同实施例将参照图9A、9B、10A-10D和11A-11C所示的体结构进行说明,图9A说明了手柄120a的实施例,图9B说明了手柄120b的实施例。手柄120a是示意性手柄,所述手柄在拇指801和长指604如图5B和5C展开时形成,手柄120b是示意性手柄,所述手柄在拇指801和长指604如图5A所示接触时形成。
此设计的手柄120a、120b的主体121a、121b由自由形式的曲线形成,并且形状如同靴子,并显示在图9A、9B、10A-10D和11A-11C中。图9A、9B、10A-10D和11A-11C中所示的此设计的手柄120a、120b的主体121a、121b具有此设计的手柄的桡骨侧321a、321b和尺骨侧421a、421b。
此设计的手柄120a、120b的主体121a、121b具有如图9A、9B、10A-10D和11A-11C所示的四部分。主体121a、121b的近侧(远部)部分521a、521b、手掌部分721a、721b、手柄120a、120b的主体121a、121b的拇指部分821a、821b,手柄120a、120b的这些部分的每个与手柄120a、120b的对应相邻部分相毗邻。
主体121a、121b的近侧(远部)部分521a、521b被限定对应近侧水平桡骨线108,所述近侧水平桡骨线108自拇指801的基部801a至手100的桡骨侧301的水平褶皱101,如图1和6中所示。
主体121a、121b的手掌部分721a、721b被设计自手100的水平褶皱101向远处延展到长指604的近侧手指褶皱603,如图1和图6中所示。
主体121a、121b的远侧(前部)部分621a、621b被设计自近侧手指褶皱603延展至长指606、607、608和609的尖部610。
主体121a、121b的拇指部分821a、821b被设计在手100处于“T位置”时,自拇指801的基部801a上的近侧水平桡骨线108延展至长指604的尖部610。
此设计的手柄120a、120b的主体121a、121b可以被分为三个连续部分,分别为桡骨部分331、中间部分231和尺骨部分431,并自桡骨侧321a、321b安排至尺骨侧421a、421b,特别显示在图12以及图9A-10D中。桡骨部分331形状大致是椭圆,并可以具有较宽的沙漏或者凹陷形状,所述沙漏或者凹陷形状自桡骨侧边351延展至桡骨部分331的尺骨边352。中间部分231大致是椭圆形,弯曲的外表面与在“T位置”中的手100的形状相一致。尺骨部分431的近侧(后部)侧543通常是三角弯曲形状,其形状与所指鞋的形状相似,尺骨部分431的远侧(前部)侧643通常是椭圆形状,其形状与鞋的后跟的后部形状相似。尺骨部分431的远侧(前部)侧643的自其中心的半径比自桡骨部分331的远侧(前部)侧641的中心的直径小。
桡骨部分331对应手100的桡骨侧301,包括食指606、手掌肌肉区域302、与食指606和拇指801相关的小指球关节106。中间部分231对应中指607和无名指608以及在手掌100b的对应掌骨关节106。尺骨部分431对应手100的小指609和小指球肌区域102。
各部分231、331、431具有近侧、手掌、远侧和拇指侧。桡骨部分331近侧(后部)541、手掌桡骨侧741、远侧(前部)桡骨侧641和拇指桡骨侧841。中间部分231具有近侧(后部)542手掌中间侧742、远侧(前部)中间侧642和拇指中间侧842。尺骨部分431具有近侧543、手掌尺骨侧743、远侧(前部)尺骨侧643和拇指尺骨侧843。
手柄120a、120b的主体121a、121b可以具有沿着不同表面的边,显示在图9A-12中。
桡骨部分331可以在桡骨侧321a、321b具有桡骨侧边351。桡骨部分331可以在近侧桡骨侧541上具有尺骨边551。
中间部分231可以在其近侧542具有桡骨侧边552,在近侧542其和桡骨部分331的桡骨侧541相遇。中间部分231可以在其近侧中间侧542上具有尺骨边553,在近侧中间侧542上其和尺骨侧431相遇。
尺骨部分431具有沿着其近侧桡骨侧543和另外的边452的桡骨边554,在另外的边与主体121a、121b的尺骨侧421a、421b相遇。
此外,在图9A至12的手柄120a、120b中,如此处讨论尺骨接触区域的形状可以是凹形、平面或者凸起,这依赖于手柄的应用。同样,尺骨部分的桡骨边可以形成唇或者脊,所述脊延展到手掌的尺骨侧。这可以稳定手的尺骨侧并防止滑动,这样的变化对诸如自行车手闸是非常有用的。此外,尽管尺骨部分的桡骨侧看似水平,但是,尺骨部分的接触点由小指球肌区域形成,尺骨部分的接触点的形状是楔形。
同样,在图9A至图12的手柄120a、120b中,变化可以发生在手柄的不同部分。例如,长指604终端于拇指侧的表面可以是圆形、变平或者凹陷,或者具有多个下凹。此外,拇指801接触手柄120a、120b的拇指侧的区域可以是圆形、变平或者下凹的。
此外,在图9A至12的手柄120a、120b中,可以具有不同的变化包括作为中指褶皱的参考区域的前部升高、以及形成在手柄的手掌侧中的凹陷可以作为横过掌骨的宽度的参考区域。
图13A和图13B说明了围绕图9A的手柄120a的右手100。手柄120a的主体121a的近侧(后部)541接触手掌肌区域302和小指球肌区域402,但是不接触手掌100b的纵向褶皱201。手掌100b和掌弓102接触手柄120a的主体121a的手掌部分721a。长指604与手柄120a的主体121a的远侧部分621相接触。拇指801接触手柄120a的主体121的拇指部分821。
手柄120a的桡骨部分331、中间部分231和尺骨部分431的相对各部分或者手100的关系显示在图14A、14B和14C中。图14A显示了手100的桡骨侧301接触手柄120a的桡骨部分331。手掌肌区域302自近侧或者桡骨水平线108至手100上的水平手掌褶皱101接触桡骨部分331的近侧(后部)541。食指606的掌骨关节103自水平手掌褶皱101至近侧手指褶皱603接触桡骨331的手掌桡骨侧741。食指606自近侧食指褶皱603至指尖610接触桡骨部分331的远侧(前部)641以在桡骨部分331中终结在食指放置位置661。拇指801在拇指接触位置861接触桡骨部分331的拇指桡骨侧841,这样拇指801放置在靠近桡骨部分331的尺骨侧的区域中。
图14B显示了纵向褶皱201的中间部分231的关系。手100的TCL202不接触中间部分231的近侧中间侧542。这产生了手柄120a的正中空间221。中指607和环指608的掌骨关节103在掌弓102接触中间部分231的中间掌侧742。中指607和无名指608接触中间部分231的远侧(前部)中间侧742的凸起。中指607和环指608的尖部610结束在相同的线L,如同食指606在桡骨部分331中那样。手100在中间部分231的拇指侧842上不接触。
图14C示出了手柄120a的尺骨侧431和手100的关系。
手100的小指球肌区域402接触此设计的手柄的尺骨部分431的近侧尺骨侧543至水平褶皱101的尺骨侧。
小指609的掌骨关节103接触手柄120a的尺骨部分431的手掌尺骨侧743。尺骨部分431的远侧(前部)尺骨侧643接触小指609。小指609接触远侧尺骨侧643的凹陷部分并和长指606、607、608一样终结在相同的线L,长指606、607、608围绕桡骨部分331和中间部分231。手100在尺骨部分431的拇指侧842上不接触。
手柄120a、120b的主体121a、121b可以具有沿着与手100的不同部分相关的不同表面的边。手柄120a、120b的对应边根据图9A至12已经在前面进行了说明,并分别与手100的对应部分相关,如图7和8中所示。
参照图9A至12和7以及8,手柄121a的桡骨侧321的桡骨侧边351靠近手100的桡骨侧301。桡骨部分331的端部的附近尺骨边551在纵向桡骨线312接触手100。
近侧中间部分桡骨边552不接触手100但是为手柄120a、120b的正中空间221的桡骨边界。近侧中间部分尺骨边553不接触手100但是为手柄120a、120b的正中空间221的尺骨边界。
尺骨部分431具有沿着近侧桡骨侧的边554,在近侧桡骨侧与纵向尺骨线412相接触。尺骨部分431具有另外的边421a、421b,在另外的边421a、421b与手100的尺骨侧401相接触。
同样,图8显示了星号“*”所示的手柄120a、120b相对手100的手掌表面100a在“T位置”中的被支撑区域S。
此外,图15A和图15B是图9B的手柄120b的横截面视图,图15A示出了掌骨901和掌弓102相对拇指801的掌骨901的关系,图15B示出了长指606、607、608和609以及掌骨801和拇指801的关系。
如前所述,本发明提供了一种手柄或者把手的设计方法和装置,其提供了可以填充除了下面的腕管之上的区域之外的不同区域。这样的设计方法和装置是为手所使用的不同支撑、手柄、器具和工具所使用。
例如,图16A、16B、16C和16D分别显示了图9B的手柄120b的四个视图,其被二分或者分为两个半部分,图16A表示手柄120b的右半部分120b1,图16B表示手柄120b的左半部分120b2,图16C表示手柄120b的远侧(前部)部分120b3,以及图16D表示手柄120b的近侧(后部)部分120b4,同样也可以用于自门延展或者可以用于推动或者滑动物体。
例如,图31显示了箱或者行李1002的行李手柄或者拉手1000,利用了图16C的远侧半部分120b3。另外的一个例子显示在图22E中说明了一种带铰链工具,诸如订书机1004,所述钉书机1004在铰链1006桡骨端部组合图16C和图16D的部分120b3和120b4,钉书机构1008用于在尺骨端分发钉。
使用本发明的手柄的二分部分的另外的例子显示在图22F中,作为一种手锻炼机械1011,其使用图16C和16D的部分120b3和120b4,这两部分由通过弹簧1014围绕的轨道1012所连接,这样部分120b3和120b4可以通过手拉在一起并通过弹簧1014的作用而释放。
图20示出了本发明的设计的图9B的手柄120b的另外的实施例,所述设计可以沿着轴1016滑动。这样的手柄可以被调节以使得手腕和手的位置彼此中立。这可以通过在手柄120b的端部用更大的圈,并在手柄120b的中间用较小的圈并入两个相对的锥1018。为了实现中间手腕位置的调整可以用螺栓1020。手柄120b或者图20可以和诸如自行车或者摩托车的手把一起使用。
图21A示出了远侧(前部)视图,图21B示出了本发明的图9B的手柄120b的另外的实施例的侧视图,其可以在任何的角度通过不同的方法连接到装置并可以在不同的方向中转动或者调整。例如,手柄120b的实施例通过球关节布置1022可以连接到图21A和图21B中的杆1024。
图22A-22D说明了本发明用作挤压装置的手柄120b的不同实施例,图22A至图22D说明了手闸的侧视图,图22B说明了手闸的远侧(前部)视图,图22C示出了透视图,图22D示出了手和图22A的手闸相配合的透视图。
自行车闸的手控制基于杠杆系统。杠杆连接到金属丝,固定部分连接到手把。挤压或者拉动杠杆减小了杠杆的未固定端和手把之间的宽度。参照手100、拇指801、掌骨肌区域302和小指球肌区域402被固定到手把,而长指604拉动杠杆。环指608和小指609可以用于开始拉动杠杆。这些手指典型地更小或者与更小的屈曲前臂肌相关。这些指608和609必须进一步往前伸并比食指606和中指607更工作更费力。使用最弱的手指来气动并执行最大的拉动力不是有效的。此外,用于夹持杠杆的长指604的肌肉系统不是同步的。
较弱的表面屈曲肌拉动较少涉及的食指606和中指607的中指骨606b和607b,而较强但是更小的较深屈曲肌子单元拉动环指608和小指609的远侧指骨608a和609a。这样,不对称肌肉被用于拉动杠杆,所述杠杆拉动金属丝。
继续参照图22A至图22D,更有效的手闸1023及其使用方法将具有与手柄120b的前部相同形状的移动部件1024,所述手柄120b被放置平行于手柄120b,这样在其被挤压时,整个部件1024移动相同的距离。这样的部件1024朝固定手柄120b挤压以拉动金属丝,所述金属丝拉动闸系统1024,所述闸系统被设计推动液压流体以执行闸机构。
相似地,许多系到组织中的医疗装置基于使用长指拉动杠杆的相同的原理。同样地,许多与手配合的工具也基于杠杆系统来使得工具的钳夹夹持。这和剪刀相似,但是在剪刀中两个部件围绕固定轴枢转。这样,和图22A至22D中所示的手闸1023相似的系统可以用于医疗装置和其它由手保持并基于杠杆原理的工具中。
图23A-23I说明了与不同工具一起使用的本发明的图9B的手柄120b的不同实施例,可以和诸如钓鱼杆的如图23A和23B中所示的轴1026一体形成。同样,如本发明中的图23A和23B所示的手柄120b在作为诸如自行车或者摩托车上的支撑使用时,可以转动并具有弹簧机构。
图23C、23D和23E说明了连接到铲1028的轴1027的手柄120b的实施例。铲1028的手柄120b可以被放置以相对轴1027通过合适的转动连接装置1027a进行转动。图23C中所示的铲1028的手柄120b被显示与右手100一起使用,手柄120b基本与铲刀1029平行对齐。图23D中的铲1028的手柄120b被显示与左手100一起使用,手柄120b基本与铲刀1029平行对齐,但是自图23C中的手柄120b的位置转动大约180度。图23E中的铲1028的手柄120b被显示与右手100一起使用并自图23C中的手柄120b的位置基本转动90度,以基本垂直于铲刀1029对齐。
图23F说明了连接到轴1030的手柄120b的实施例,通常和杠铃1031一起使用。图23G说明了右手柄120b和连接到轴1032的左手柄120b实施例,轴1032固定在部件1033中,并和引体向上杆一起使用。
图23H说明了连接到轴1035的手柄120b的实施例,以和滑雪杖1036一起使用。
图23I说明了连接到轴1037的手柄120b的实施例,所述手柄120b和扫帚1038一起使用。
图24A-24D说明了使用本发明手柄的其它实施例。
首先参照图24A和24B,与图9B的手柄120b的相似的手柄120c的实施例,但是具有较短的尺骨延展以用于诸如示于图24A的螺丝起子1039的转动以及在保持在手100中以用于图24B所示的具有轴1040转动手柄120c的转动。
如图24A和图24B所示,转动工具轴手柄120c被设计用于双手。手柄120c被用于作为前臂转动功能的附件。手柄120c设计具有较短的近侧尺骨侧533并在比手100的水平褶皱101的尺骨侧更靠近手100的尺骨侧401固定,这样手100可以比图9A和图9B所示的设计的手柄120a、120b更多地包围转动手柄120c。更短的尺骨端553不是以与图9B中所示的自行车类型把手120b相似的方式支撑手。手120c也被设计用于具有凹陷1041以在手柄120c的桡骨端容纳拇指801。在手柄120c中,拇指801的放置和在前述讨论的“P位置”的拇指位置相似。
转动轴手柄120c的中间部分231具有基本和图9B中所示的手柄120b的对应部分相同的形状。具有更短尺骨端的手柄120c的手掌、拇指和远侧(前部)环绕以固定掌骨102和指杯601。长指604沿着相同的线L在基本与图14A-14C中所示的“T位置”相似的线性布置中终结。转动轴手柄120c在手100的尺骨神经或者动脉或者CT上不接触或者没有压力。
在使用时的转动轴手柄120c平行柄靠近如图18A和图19A和19B所限定的平面B,所述平面B延展通过桡骨303,如前所述。可选地,将拇指801朝手柄120c的桡骨侧的拇指侧放置并自平面B在桡骨方向中远离放置的中心脊是有利的,因为拇指801不仅放置在保持这样的手柄120c更舒适的位置,此可选位置提高了用于前臂的前后转动的电机功能。
此外,转动工具轴手柄120c可以适于在中指607和环指608之间容纳轴1039、1040。对螺丝起子而言,中指607和环指608必须展开以允许轴1039、1040被放置在这些手指608和607之间。螺丝起子轴用孔1042(通常位于中指607和环指608之间)可以被转移并放置在食指606和中指607之间。
现在参照图25,图25显示了用于锯子1043而设计的图24A和图24B的工作轴手柄120c的实施例。当手柄120c被作为锯子1043用的手柄时,连接或者与锯刀片1045一体形成的各臂1044典型地自手柄120c的桡骨侧边351和自尺骨部分边452延展,并与锯刀片1045相遇。孔1046分别位于手柄120c中以容纳臂1044。
现在参照图24C,图24C示出了图9A的手柄120a的实施例并入一个或者多个按钮或者开关1047,诸如用于在图24C中所示的至少一个或者多个位置具有不同的功能性控制。
现在参照图24D,图24D示出了图9A的手柄120a的实施例并和手套1048一体形成,手套1048具有用于容纳工具或者器具的开口槽1049。此外,此设计的手柄的中间部分的手掌侧可以连接到手套的内部或者外部以在手把持住诸如高尔夫俱乐部器具或者网球球拍之类时维持掌弓。
图26A-26D说明了本发明的手柄的其它实施例,诸如图9B中的手柄120b与图26A中所示的来复枪1050一起使用,图9B中的手柄120b与图26B中所示的箭头1052所示的前后枢转运动的装置1051一起使用,诸如图9B的手柄120b与图26C中所示的侧至侧枢转运动的装置1053,以及图9B的手柄120b用于与图26D中所示的装置1055组合围绕轴1054转动。
图27A-27F说明了本发明的手柄120d的另外的实施例,用于和计算机鼠标或者基于图9A的手柄120a的交互装置一起使用,拇指侧轮廓显示在图27A中,顶部或者桡骨侧轮廓图显示在图27B中,拇指侧轮廓视图与手配合显示在图27C中,上部或者桡骨轮廓视图与手配合显示在图27D中,长指侧视图显示在图27E中,长指侧视图与手配合显示在图27F中。
继续参考图27A-27F,现有计算机鼠标和与按钮或者开关一起使用的相似的工具迫使手100和前臂将手朝下,这样手腕204在其运动范围的端部。腕关节自此位置受拉并可能受伤。图27A-27F中的手柄120d的实施例解决了现有手腕过度向前弯曲的问题,同时通过维持前臂、手腕和手的中性桡骨转动而使用鼠标。基于图27A-27F中所示的手柄120a上的鼠标手柄120d基于“N位置”所限定的中性位置上并显示由右手100所形成的实施例。与图9A的手柄120a的实施例相似,在与手柄120d接合时的拇指801的尖部610与食指606和中指607之间的空间600相对,环指608和小指609围绕此设计的手柄120d的尺骨部分431。环指和小指608和609比食指606和中指607屈曲更多。当手柄120d与手100一起使用时,空间261出现在TCL 202之下,尺骨支撑1100和分别用于食指606和中指607的支撑1110、1120也出现在手柄120d中。此手柄120d也在如图18和19所限定和所示的大约30度位置维持中性手腕位置。
可选地,图27A-27F的手柄120d可以用作游戏杆或者直升机等的控制器。
图28说明了本发明基于手柄120b或者图9B用于与方向盘或者引导机构1058一起使用的手柄的另外的实施例。
图29A和29B说明了本发明的用于笔、铁笔或者手持工具的手柄的另外的实施例。图29A说明了与手配合的桡骨视图,图29B说明了拇指侧视图。
图29A和图29B中所示的手柄120e基于图9B的手柄120b的桡骨侧331,其中拇指801、食指和中指关节111a如图17B所示延展。这样的手柄120e可以保持不同的铁笔型工具1060,包括钢笔和牙科工具。旋转工具1062可以被并入以转动工具的尖部。右手工具显示在图29A和29B中,并可以对左手进行修改。
图30A-30E示出了本发明的手柄的其它实施例,用于与装置一起使用,这样手柄固定在手的掌弓中。
图30A说明了用于稳定CTS用手腕204的支架1065,图30B说明了与手100配合的图30A的支架1065。腕管综合征用手腕支架1065也放置在图9A的手柄120a的中间部分231的手掌侧,这是通过在支架中包括一个掌弓102用支撑部件1068,所述支撑部件具有延展1069,所述延展1069将支架1065绑定到前臂。
图30C说明了前视图,图30D示出了漆刷1070的侧视图,所述漆刷1070具有手柄120f,所述手柄120f基于本发明的图9A的手柄120a的中间部分231的手掌侧742。图30E说明了图30C和30D的漆刷1070的手柄120f固定到手100的掌弓102中。
漆刷用手柄120f通常是较大铁笔,具有较重的刷状工作端1072。图30C、30D和30E说明了根据本发明的固定到手100的手掌100b的掌弓102中的漆刷手柄120f。在用于具有刷状工作端1072的漆刷1070的这样的手柄120f中,手柄120f的远侧752具有斜度Q1,所述斜度Q1比手柄120f的近侧753的斜度Q2更尖锐以在长指604与图17B所示的长指604相似的位置延展时固定手掌100b的MP关节103a。通过手柄102f分别具有斜度Q1和Q2的侧面752和753的表面所形成的角度Q3提供了手100抓住和拧住较大物体的能力,因为拇指801和中指607和无名指608的尖部610相对,这增加了可以通过长指拧拇指801而产生的力。
图32A、32B和32C说明了本发明用于抓、拧或者切的手柄120g的其它实施例,图32A说明了这样的手柄用于镊子型工具1080,图32B说明了与图32A的手柄120g配合的手100,图32C说明了连接到工具1090的手柄102g。
图32A至32C说明了基于“T位置”的用于镊子或者钳子型工具1080的手柄120g。镊子或者钳子工具1080的手柄120g的桡骨端361在手掌100b的水平褶皱101的桡骨侧与手100相遇。镊子或者钳子工具1080的尺骨端461遇到手100的尺骨侧401,所述手100的尺骨侧401在豌豆骨403的远侧、手掌100b的水平褶皱101的尺骨端的近侧。拇指801、食指606和长指607与图17B中的拇指801和长指604处于相似的位置。如图32B中所示,拇指801与食指606和中指607之间的空间600相对。用于镊子或者钳子型工具1080的刀片1082的材料可以具有弹簧状的固有属性,其允许相对的拇指801和食指606以及中指607相互推动。尽管并入镊子或者钳子型工具1080的手柄120g的设计基于“T位置”,手柄100和使用“N位置”的原理的手柄120g接合,因为环指608和小指609围绕此设计的镊子或者钳子型工具1080的尺骨延展1084。这样的镊子或者钳子型工具1080可以用作可选地打开和闭合不同工具或者器具的机构。例如,这样的镊子或者钳子型工具1080也可以通过不同类型的适当连接装置1092可选地连接或者与工具1090脱离连接,连接到或者与镊子或者钳子型工具1080一体形成的工具1090包括但是不限于镊子尖部、剪刀和多个其它抓住、保持、推动、拉动和提升类型的工具或者器具。此外,在镊子或者钳子型工具1080中,工具1090可以具有尖端或者末端部分1094。
总之,根据本发明的设计的手柄可以被模制并与许多手持常用设备邻近。此外,基于本发明的设计方法的手柄可以连接或者一体形成到可以升高、转动、移动、承载等的物体上。本发明的这样的手柄/把手可以有利地在其桡骨侧、尺骨侧、手掌侧或者拇指侧连接到或者一体形成到一个物体。此外,本发明的手柄/把手可以被设计在连接位置的不同轴转动。例如,所述手柄可以通过延展连接到轴并用于转动或者引导。
同样,在本发明的手柄/把手中,不同的材料可以用于手柄/把手的制造,诸如不同的木材、金属、塑料、复合物、橡胶复合物、乳胶和有机或者无机材料,适于应用到本发明的手柄或者把手的特定应用中。此外,不同的材料可以被添加来改善和个性化本发明的手柄/把手的配合。
本发明的操作模式、原理、优选实施例已经在前述说明书中进行了说明。但是,本发明意图保护但是不限于所公开的特定的实施例。此处所述的实施例只是为了说明而不是为了限制。可以通过其它以及等同实施例来变化和改变,而没有背离本发明的精神。相应地,所有这些变化、改变和等同物将落入本发明的权利要求书的精神和范围之内。
Claims (46)
1.一种手用装置,包括:
主体,所述主体是大体的靴形主体,所述主体包括桡骨端和尺骨端;以及
至少主体的一部分包括至少一个表面部分,所述至少一个表面部分被安置用于分别在主体上放置至少一个手的对应部分,主体的各部分包括至少一个用于在主体上放置手的对应部分的表面部分,所述手的对应部分被放置与主体的桡骨端和尺骨端相关用于将主体和手的至少一个区域形成配合关系,而主体没有在手下面的腕管之上的手的区域上设置大的压力。
2.根据权利要求1所述的装置,其特征在于,所述主体进一步在纵向被二分地限定为近侧和远侧,所述近侧包括自手掌转开的部分,以避免与位于腕管上的手掌表面相接触。
3.根据权利要求1所述的装置,其特征在于,桡骨端与轴相连,所述轴进一步连接到手工工具、自行车、或者摩托车。
4.根据权利要求1所述的装置,其特征在于,所述主体被纵向二分为近侧和远侧,其中近侧和远侧通过至少一个弹簧枢转连接,至少一个弹簧将被用于挤压装置或者手运动器械。
5.根据权利要求1所述的装置,其特征在于,所述主体被纵向二分为近侧和远侧,其中远侧被用作提箱手柄或者容器手柄。
6.根据权利要求1所述的装置,其特征在于,所述主体被纵向二分为近侧和远侧,其中所述主体的近侧和远侧在一端铰接,以用作挤压工具或者订书机。
7.根据权利要求1所述的装置,其特征在于,
所述主体的至少一个部分包括桡骨部分、中间部分和尺骨部分,
所述桡骨部分的一侧用于容纳手的拇指,另外一侧用于容纳手的食指,桡骨部分具有与手的手掌表面的一部分相接合的表面;
所述中间部分的一侧用于容纳手的中指和手的无名指,并具有与手的手掌表面的一部分相接合的表面,以放置中指和无名指的端部;以及
所述尺骨部分的一侧用于容纳手的小指,并具有能够与手的手掌表面的一部分相接合的表面,以放置小指的端部;
其中桡骨部分的表面、中间部分的表面和尺骨部分的表面用于与手的手掌表面的对应部分相接合,将所述装置放置在手中,而没有将相当的压力设置在腕管之上的手的表面上。
8.根据权利要求7所述的装置,其特征在于,所述装置的桡骨部分、中间部分和尺骨部分至少其一与轴相连接。
9.根据权利要求8所述的装置,其特征在于,所述轴是自行车或者摩托车的手把。
10.根据权利要求8所述的装置,其特征在于,所述轴用于工具。
11.根据权利要求8所述的装置,其特征在于,所述手柄通过装置连接到所述轴以调整手柄相对所述轴的位置。
12.根据权利要求8所述的装置,其特征在于,所述轴包括操纵机构。
13.根据权利要求7所述的装置,其特征在于,所述装置一体形成在手套中。
14.根据权利要求7所述的装置,其特征在于,所述装置与一个设备相组合,用于使得装置相对所述设备进行枢转运动。
15.根据权利要求1、7、8、9、10、11、12、13和14其中之一所述的装置,其特征在于,所述装置包括手用把手。
16.根据权利要求15所述的装置,其特征在于,所述主体位于手中,所述主体不接合位于下面的腕管的区域之上的手的区域。
17.根据权利要求1、7、8、9、10、11、12、13和14其中之一所述的装置,其特征在于,所述主体位于手中,所述主体不接合位于下面的腕管的区域之上的手的区域。
18.根据权利要求7所述的装置,其特征在于,所述装置包括至少一个用于相应功能控制的开关或者按钮。
19.根据权利要求18所述的装置,其特征在于,所述装置包括交互装置护着计算机鼠标。
20.根据权利要求1所述的装置,其特征在于,所述装置包括手用镊型工具,并且其中:
所述主体的至少一个部分包括桡骨部分和尺骨部分,
桡骨部分,所述桡骨部分具有一对相对托板,分别用于容纳手的拇指和手的食指,桡骨部分具有桡骨端用于与手的手掌表面的桡骨侧的一部分相接合,所述托板自所述手的手掌表面的桡骨侧的一部分延展;以及
尺骨部分,所述尺骨部分的一侧用于容纳手的无名指和小指,所述尺骨部分具有尺骨端用于与手的手掌表面的尺骨侧的一部分相接合,
其中桡骨部分的桡骨端、尺骨部分的尺骨端与手的手掌表面的桡骨侧和尺骨侧的对应部分相接合,以将镊型工具放置在手内,而没有与位于腕管之上的手的表面相接合。
21.根据权利要求20所述的装置,其特征在于,所述镊型工具有这样的材料,使得镊型工具具有弹簧属性,以在闭合后有选择地打开。
22.根据权利要求20所述的装置,其特征在于,还包括分别连接到相对托板至少其中之一的工具。
23.根据权利要求22所述的装置,其特征在于,每个工具可选地连接到对应的相对托板或者自对应的相对托板分离。
24.根据权利要求1所述的装置,其特征在于,
所述主体的至少一个部分包括用于接合手的掌弓的部分,所述用于接合手的掌弓的部分具有远侧和近侧,所述远侧具有斜度,所述斜度比用于与手的手掌的掌骨指骨(MP)关节相接合的近侧更尖锐。
25.根据权利要求24所述的装置,其特征在于,所述装置包括手柄,所述手柄包括用于和所述手的掌弓相接合的部分;所述装置还包括:
用于所述装置的工作末端。
26.根据权利要求25所述的装置,其特征在于,所述工作端包括刷型工作端。
27.根据权利要求1所述的装置,其特征在于,所述主体的至少一个部分包括用于与手的掌弓相接合的支撑部件,所述装置还包括:
与前臂相接合的护套;
将护套和支撑部件相连接以提供手用手腕护套的延展部件。
28.根据权利要求1所述的装置,其特征在于,所述主体的至少一个部分具有容纳手的拇指的表面和容纳手的食指的表面的部分,所述部分具有与手的手掌表面相接合的表面,以及所述部分的一部分用于并入装置以自所述部分延展。
29.根据权利要求28所述的装置,其特征在于,还包括:
并入所述部分的装置。
30.根据权利要求29所述的装置,其特征在于,所述装置包括铁笔型装置、书写用工具或者牙科用具。
31.根据权利要求1所述的装置,其特征在于,
所述主体的至少一个部分包括桡骨部分、中间部分和尺骨部分,
桡骨部分的一侧用于容纳手的拇指,另外一侧用于容纳手的食指,桡骨部分具有与手的手掌表面的一部分相接合的表面;
中间部分的一侧具有容纳手的中指的近侧部分和手的无名指的近侧部分,中间部分具有与手的手掌表面的一部分相接合的表面;以及
尺骨部分的一侧用于容纳手的小指的近侧部分,尺骨部分具有与手的手掌表面的一部分相接合的表面;以及
桡骨部分的表面、中间部分的表面和尺骨部分的表面用于与手的手掌表面的对应部分相接合,将所述主体放置在手中,而没有与位于腕管之上的手的表面相接合;并且
所述装置还包括:
移动部件,所述移动部件与所述主体相对放置以容纳手的长指的端部,移动部件用于相对主体进行移动。
32.根据权利要求31所述的装置,其特征在于,所述移动部件的形状对应所述主体的前部的形状,所述主体的前部与所述移动部件相对。
33.根据权利要求1所述的装置,其特征在于,
所述主体的至少一个部分包括桡骨部分、中间部分和尺骨部分,
所述桡具有与手的手掌表面一部分相接合的表面;
所述中间部分具有与手的手掌表面一部分相接合的表面,以将中指和无名指的端部大体对齐;以及
所述尺骨部分具有能够与手的手掌表面的一部分相接合的表面,以将小指的端部与中指和无名指的端部大体对齐;
其中桡骨部分的表面、中间部分的表面和尺骨部分的表面用于与手的手掌表面的对应部分相接合,将手柄放置在手中,而没有将大的压力设置在腕管之上的手的表面上。
34.根据权利要求18-33其中之一所述的装置,其特征在于,所述主体位于手中,所述主体不接合位于下面的腕管的区域之上的手的区域。
35.一种设计与手的尺寸对应的手柄的方法,包括步骤:
将手设置在一个位置,使手的长指的末端大体对齐;
从手的水平褶皱的桡骨侧至尺骨侧测量跨过手的长指的掌骨的距离,由此限定手柄的长度;
映射在手的拇指的基部的远侧并沿尺骨方向行进在手的纵向褶皱之前结束的第一条线;
映射从手的尺骨侧在手的尺骨侧上的豌豆骨的远侧并朝着手的桡骨侧行进大约2/3的手的小指球肌肉区域的第二条线;
映射自手的手掌肌肉区域延展至手的水平褶皱的小指球肌肉区域的第三条线;
将第一线、第二线和第三线和横过手的手掌的第一纵向线以及第二纵向线相连接,由此限定具有手的对应尺寸的手柄的近侧,而手柄不会在位于手的腕管上的手的部分上设置大的压力。
36.根据权利要求35所述的设计手柄的方法,其特征在于,还包括步骤:提供手柄的长度以包括在桡骨端和尺骨端延展超过手的手指和手掌表面的部分,以定位手的食指和小指以防止手滑动。
37.根据权利要求35所述的设计手柄的方法,其特征在于,还包括步骤:
将手设置在一个位置,这样手的长指的尖部基本对齐,手的拇指与手的食指和中指相对,手的尺骨侧放置在平面表面上;以及
将第一表面、第二表面和第三表面的边结合以形成第四表面来确定手用手柄的形状尺寸,以及
其中第一表面是手的尺骨侧所放置其上的平面表面的水平平面,
其中第二表面是水平平面,所述水平平面接触手的桡骨侧并平行于手放置其上的平面表面,
其中第三表面垂直于手放置的其上的平面表面的水平平面,第三表面始于手的拇指基部的鱼际,并终于手的长指的手掌表面,第三表面与手的长指相遇的位置在手放置在所述位置时依赖于手的拇指和手的食指之间的距离,这样手的长指的尖部基本对齐,手的拇指和手的食指和中指相对,手的尺骨侧放置在平面表面上,以及
其中第四表面是手的带轮廓的内表面,所述带轮廓内表面通过第一表面、第二表面和第三表面与手相交形成,来与手形成第四表面的边界以提供手用手柄用形状尺寸。
38.根据权利要求37所述的设计手柄的方法,其特征在于,将第一线、第二线和第三线与横过手的手掌的第一纵向线以及第二纵向线相连接,由此对手的手柄的近侧提供近侧边界尺寸。
39.根据权利要求38所述的设计手柄的方法,其特征在于,进一步包括步骤:
将手柄的形状尺寸与手柄的近侧边界尺寸相组合以提供手用手柄的体积尺寸。
40.根据权利要求35-39其中之一所述的设计手柄的方法,其特征在于,进一步包括步骤:
在手的长指的近侧指节间关节(PIP)测量屈曲的第一角度,手放置在手柄需要测量的位置;
在手的长指的远侧指节间关节(DIP)测量屈曲的第二角度,手放置在手柄需要测量的位置;
在手的长指的掌骨指骨关节(MP)测量屈曲的第三角度,手放置在手柄需要测量的位置;
在手的拇指的远侧指节间关节(DIP)测量屈曲的第四角度,手放置在手柄需要测量的位置;以及
将屈曲的第一角度、屈曲的第二角度、屈曲的第三角度和屈曲的第四角度的测量值组合来提供手柄自近侧至手柄的远侧的距离范围并提供手柄自手掌侧至手柄的拇指侧的距离范围,其中手用手柄避免将大的压力设置在腕管的区域之上的手的手掌的中间部分上。
41.根据权利要求40所述的设计手柄的方法,其特征在于,进一步包括步骤:
将手设置在T位置。
42.根据权利要求41所述的设计手柄的方法,其特征在于,设计手柄以避免与位于腕管的区域之上的手的部分相接触。
43.根据权利要求40所述的设计手柄的方法,其特征在于,设计手柄以避免与位于腕管的区域之上的手的部分相接触。
44.根据权利要求36、37、38、39或40其中之一所述的设计手柄的方法,其特征在于,设计手柄以避免与位于腕管的区域之上的手的部分相接触。
45.根据权利要求35-39其中之一所述的设计手柄的方法,其特征在于,
将手设置在T位置。
46.根据权利要求45所述的设计手柄的方法,其特征在于,设计手柄以避免与位于腕管的区域之上的手的部分相接触。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US33052701P | 2001-10-24 | 2001-10-24 | |
| US60/330,527 | 2001-10-24 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1607913A CN1607913A (zh) | 2005-04-20 |
| CN1310604C true CN1310604C (zh) | 2007-04-18 |
Family
ID=23290154
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB028260554A Expired - Fee Related CN1310604C (zh) | 2001-10-24 | 2002-10-24 | 手柄/把手及其设计方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (3) | US6988295B2 (zh) |
| EP (1) | EP1482818A4 (zh) |
| JP (1) | JP2006507015A (zh) |
| CN (1) | CN1310604C (zh) |
| AU (1) | AU2002349897B2 (zh) |
| CA (1) | CA2463903A1 (zh) |
| MX (1) | MXPA04003903A (zh) |
| WO (1) | WO2003035331A2 (zh) |
Families Citing this family (172)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7510483B2 (en) | 2004-07-09 | 2009-03-31 | William S. Tremulis | Golf club grip |
| US11229472B2 (en) | 2001-06-12 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with multiple magnetic position sensors |
| US20060137144A1 (en) * | 2001-10-24 | 2006-06-29 | Tillim Stephen L | Handle/grip and method for designing the like |
| WO2004089733A2 (en) * | 2003-04-02 | 2004-10-21 | Global Motorsport Group, Inc. | Ergoonomic handgrip with medical benefits |
| US7284300B1 (en) | 2004-01-02 | 2007-10-23 | Bruns Nancy L | Grip for a handle |
| US20050150083A1 (en) * | 2004-01-08 | 2005-07-14 | Roberts D. D. | Utility handle providing enhanced grip and comfort |
| US8182501B2 (en) | 2004-02-27 | 2012-05-22 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical shears and method for sealing a blood vessel using same |
| US7484903B2 (en) * | 2004-08-17 | 2009-02-03 | Komorowski Ronald A | Stylus holder |
| PL1802245T3 (pl) | 2004-10-08 | 2017-01-31 | Ethicon Endosurgery Llc | Ultradźwiękowy przyrząd chirurgiczny |
| US20060260458A1 (en) * | 2005-05-23 | 2006-11-23 | Gary Friend | Powered and ergonomically configured portable coping saw for one-handed use |
| US9259519B2 (en) * | 2005-09-27 | 2016-02-16 | Allegiance Corporation | Medical suction and irrigation device handpiece |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| DE502005008557D1 (de) * | 2005-12-15 | 2009-12-31 | Kum Ltd | Stiftspitzer sowie Verfahren zu seiner Herstellung |
| US7621930B2 (en) | 2006-01-20 | 2009-11-24 | Ethicon Endo-Surgery, Inc. | Ultrasound medical instrument having a medical ultrasonic blade |
| DE102006020732B4 (de) * | 2006-05-04 | 2008-05-21 | Carl Walther Gmbh | Griffstück-Ansatz-Vorrichtung für Pistolen |
| US7373860B1 (en) | 2006-07-19 | 2008-05-20 | Rinner James A | Screwdriver T-handle |
| JP5008917B2 (ja) * | 2006-07-20 | 2012-08-22 | 株式会社マキタ | 作業工具 |
| ATE537941T1 (de) * | 2006-12-28 | 2012-01-15 | Matthias Wassermann | Griff |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US8142461B2 (en) | 2007-03-22 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8911460B2 (en) | 2007-03-22 | 2014-12-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| EP2147754B1 (en) * | 2007-05-15 | 2013-07-31 | Makita Corporation | Portable power tool |
| US20090004316A1 (en) * | 2007-06-29 | 2009-01-01 | Aniello Costagliola | Ice Cream Holder |
| US20090007387A1 (en) * | 2007-07-03 | 2009-01-08 | Laghi Aldo A | Custom Grip for Writing Instruments and Other Hand Held Items |
| US8523889B2 (en) | 2007-07-27 | 2013-09-03 | Ethicon Endo-Surgery, Inc. | Ultrasonic end effectors with increased active length |
| US8808319B2 (en) | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8882791B2 (en) | 2007-07-27 | 2014-11-11 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US9044261B2 (en) | 2007-07-31 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Temperature controlled ultrasonic surgical instruments |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8512365B2 (en) | 2007-07-31 | 2013-08-20 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| EP2217157A2 (en) * | 2007-10-05 | 2010-08-18 | Ethicon Endo-Surgery, Inc. | Ergonomic surgical instruments |
| US10010339B2 (en) | 2007-11-30 | 2018-07-03 | Ethicon Llc | Ultrasonic surgical blades |
| US7780648B2 (en) | 2007-12-28 | 2010-08-24 | Boston Scientific Scimed, Inc. | Controlling movement of distal portion of medical device |
| US20090194301A1 (en) * | 2008-02-05 | 2009-08-06 | Charles Grubb | Gardening tool |
| US9840013B2 (en) | 2008-04-29 | 2017-12-12 | Pacific Handy Cutter, Inc. | Safety cutter with blade change/storage mechanism |
| ES2335464B1 (es) * | 2008-06-18 | 2011-02-09 | Michael Johan Zifferer Weigel | Empuñadura anatomica para herramientas manuales. |
| US20110130207A1 (en) * | 2008-08-01 | 2011-06-02 | Hasenyager Tom E | Personal defense device |
| US9089360B2 (en) | 2008-08-06 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US20100095421A1 (en) * | 2008-08-21 | 2010-04-22 | Kerry Franklin | Protective pad for use during athletic activities |
| US8267192B2 (en) * | 2009-02-24 | 2012-09-18 | Black & Decker Inc. | Ergonomic handle for power tool |
| US9700339B2 (en) | 2009-05-20 | 2017-07-11 | Ethicon Endo-Surgery, Inc. | Coupling arrangements and methods for attaching tools to ultrasonic surgical instruments |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| USRE47996E1 (en) | 2009-10-09 | 2020-05-19 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US9168054B2 (en) | 2009-10-09 | 2015-10-27 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US9039695B2 (en) | 2009-10-09 | 2015-05-26 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US10441345B2 (en) | 2009-10-09 | 2019-10-15 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US8486096B2 (en) | 2010-02-11 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Dual purpose surgical instrument for cutting and coagulating tissue |
| US8961547B2 (en) | 2010-02-11 | 2015-02-24 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with moving cutting implement |
| US8951272B2 (en) | 2010-02-11 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Seal arrangements for ultrasonically powered surgical instruments |
| US8469981B2 (en) | 2010-02-11 | 2013-06-25 | Ethicon Endo-Surgery, Inc. | Rotatable cutting implement arrangements for ultrasonic surgical instruments |
| US8795327B2 (en) | 2010-07-22 | 2014-08-05 | Ethicon Endo-Surgery, Inc. | Electrosurgical instrument with separate closure and cutting members |
| US9192431B2 (en) | 2010-07-23 | 2015-11-24 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instrument |
| USD667054S1 (en) | 2011-05-18 | 2012-09-11 | Dyer Edward P | Ergonomic writing instrument |
| AT511629A1 (de) * | 2011-06-24 | 2013-01-15 | Marian Lazarov | Vorrichtung für einen griff eines ballsportschlägers |
| GB2492980A (en) * | 2011-07-14 | 2013-01-23 | David Stephen Warren | A grip wherein in use a use'rs fingers and thumbs don't quite et |
| US9259265B2 (en) | 2011-07-22 | 2016-02-16 | Ethicon Endo-Surgery, Llc | Surgical instruments for tensioning tissue |
| EP2564709B8 (en) * | 2011-09-02 | 2014-02-19 | Fiat Group Automobiles S.p.A. | Method to produce a protective glove and glove made by such method |
| USD769691S1 (en) | 2011-09-08 | 2016-10-25 | Pacific Handy Cutter, Inc. | Cutter |
| US9320671B2 (en) * | 2011-11-04 | 2016-04-26 | Lightbulb, Llc | Ergonomic crutch grips |
| JP6165780B2 (ja) | 2012-02-10 | 2017-07-19 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | ロボット制御式の手術器具 |
| US9439668B2 (en) | 2012-04-09 | 2016-09-13 | Ethicon Endo-Surgery, Llc | Switch arrangements for ultrasonic surgical instruments |
| US9724118B2 (en) | 2012-04-09 | 2017-08-08 | Ethicon Endo-Surgery, Llc | Techniques for cutting and coagulating tissue for ultrasonic surgical instruments |
| US20140005705A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulating shafts |
| US20140005702A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9198714B2 (en) | 2012-06-29 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Haptic feedback devices for surgical robot |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9326788B2 (en) | 2012-06-29 | 2016-05-03 | Ethicon Endo-Surgery, Llc | Lockout mechanism for use with robotic electrosurgical device |
| US9351754B2 (en) | 2012-06-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| US9226767B2 (en) | 2012-06-29 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Closed feedback control for electrosurgical device |
| US9155381B2 (en) | 2012-09-19 | 2015-10-13 | Easy Pro Products, Llc | Guides for painting |
| CN104853688B (zh) | 2012-09-28 | 2017-11-28 | 伊西康内外科公司 | 多功能双极镊子 |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US20140135804A1 (en) | 2012-11-15 | 2014-05-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic and electrosurgical devices |
| JP2014124725A (ja) * | 2012-12-26 | 2014-07-07 | Hitachi Koki Co Ltd | 動力工具 |
| DE102013200576A1 (de) * | 2013-01-16 | 2014-07-17 | Robert Bosch Gmbh | Handwerkzeugmaschine mit einem ergonomischen Handgriff |
| US10226273B2 (en) | 2013-03-14 | 2019-03-12 | Ethicon Llc | Mechanical fasteners for use with surgical energy devices |
| US9241728B2 (en) | 2013-03-15 | 2016-01-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument with multiple clamping mechanisms |
| US9541943B2 (en) | 2013-07-22 | 2017-01-10 | Kubota Corporation | Operation lever and grip |
| US9814514B2 (en) | 2013-09-13 | 2017-11-14 | Ethicon Llc | Electrosurgical (RF) medical instruments for cutting and coagulating tissue |
| US20150151424A1 (en) * | 2013-10-29 | 2015-06-04 | Black & Decker Inc. | Power tool with ergonomic handgrip |
| US9265926B2 (en) | 2013-11-08 | 2016-02-23 | Ethicon Endo-Surgery, Llc | Electrosurgical devices |
| GB2521228A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| GB2521229A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| US9795436B2 (en) | 2014-01-07 | 2017-10-24 | Ethicon Llc | Harvesting energy from a surgical generator |
| US9554854B2 (en) | 2014-03-18 | 2017-01-31 | Ethicon Endo-Surgery, Llc | Detecting short circuits in electrosurgical medical devices |
| US10092310B2 (en) | 2014-03-27 | 2018-10-09 | Ethicon Llc | Electrosurgical devices |
| US10463421B2 (en) | 2014-03-27 | 2019-11-05 | Ethicon Llc | Two stage trigger, clamp and cut bipolar vessel sealer |
| US9737355B2 (en) | 2014-03-31 | 2017-08-22 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US9913680B2 (en) | 2014-04-15 | 2018-03-13 | Ethicon Llc | Software algorithms for electrosurgical instruments |
| US9387379B1 (en) * | 2014-05-21 | 2016-07-12 | Brainstorm Golf, Inc. | Reversible golf club grip |
| USD782897S1 (en) * | 2014-07-03 | 2017-04-04 | Jonathan Neil HARVEY | Attachment to a handle |
| US10285724B2 (en) | 2014-07-31 | 2019-05-14 | Ethicon Llc | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| USD772529S1 (en) | 2014-09-17 | 2016-11-29 | Ramanpreet Singh Sekhon | Glove |
| US10639092B2 (en) | 2014-12-08 | 2020-05-05 | Ethicon Llc | Electrode configurations for surgical instruments |
| US9630311B2 (en) | 2014-12-23 | 2017-04-25 | Charlie Creelman | Pistol grip attachment for use with a paintbrush |
| US9952618B2 (en) * | 2015-01-02 | 2018-04-24 | Extreme Steering, Inc. | Handlebar grips and handlebar assemblies including the same |
| JP6417228B2 (ja) * | 2015-01-27 | 2018-10-31 | 株式会社マキタ | 動力工具 |
| US10245095B2 (en) | 2015-02-06 | 2019-04-02 | Ethicon Llc | Electrosurgical instrument with rotation and articulation mechanisms |
| US10321950B2 (en) | 2015-03-17 | 2019-06-18 | Ethicon Llc | Managing tissue treatment |
| US10342602B2 (en) | 2015-03-17 | 2019-07-09 | Ethicon Llc | Managing tissue treatment |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US10034684B2 (en) | 2015-06-15 | 2018-07-31 | Ethicon Llc | Apparatus and method for dissecting and coagulating tissue |
| US11020140B2 (en) | 2015-06-17 | 2021-06-01 | Cilag Gmbh International | Ultrasonic surgical blade for use with ultrasonic surgical instruments |
| US11129669B2 (en) | 2015-06-30 | 2021-09-28 | Cilag Gmbh International | Surgical system with user adaptable techniques based on tissue type |
| US10765470B2 (en) | 2015-06-30 | 2020-09-08 | Ethicon Llc | Surgical system with user adaptable techniques employing simultaneous energy modalities based on tissue parameters |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| US10357303B2 (en) | 2015-06-30 | 2019-07-23 | Ethicon Llc | Translatable outer tube for sealing using shielded lap chole dissector |
| US10034704B2 (en) | 2015-06-30 | 2018-07-31 | Ethicon Llc | Surgical instrument with user adaptable algorithms |
| US10898256B2 (en) | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| US10154852B2 (en) | 2015-07-01 | 2018-12-18 | Ethicon Llc | Ultrasonic surgical blade with improved cutting and coagulation features |
| US11058475B2 (en) | 2015-09-30 | 2021-07-13 | Cilag Gmbh International | Method and apparatus for selecting operations of a surgical instrument based on user intention |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US10179022B2 (en) | 2015-12-30 | 2019-01-15 | Ethicon Llc | Jaw position impedance limiter for electrosurgical instrument |
| US10575892B2 (en) | 2015-12-31 | 2020-03-03 | Ethicon Llc | Adapter for electrical surgical instruments |
| US10716615B2 (en) | 2016-01-15 | 2020-07-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with curved end effectors having asymmetric engagement between jaw and blade |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US10709469B2 (en) | 2016-01-15 | 2020-07-14 | Ethicon Llc | Modular battery powered handheld surgical instrument with energy conservation techniques |
| US10555769B2 (en) | 2016-02-22 | 2020-02-11 | Ethicon Llc | Flexible circuits for electrosurgical instrument |
| US10429822B2 (en) * | 2016-04-12 | 2019-10-01 | The Connected Grip, Inc. | System and method for building activity-based data collection devices |
| US10485607B2 (en) | 2016-04-29 | 2019-11-26 | Ethicon Llc | Jaw structure with distal closure for electrosurgical instruments |
| US10702329B2 (en) | 2016-04-29 | 2020-07-07 | Ethicon Llc | Jaw structure with distal post for electrosurgical instruments |
| US10646269B2 (en) | 2016-04-29 | 2020-05-12 | Ethicon Llc | Non-linear jaw gap for electrosurgical instruments |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| US10245064B2 (en) | 2016-07-12 | 2019-04-02 | Ethicon Llc | Ultrasonic surgical instrument with piezoelectric central lumen transducer |
| US10893883B2 (en) | 2016-07-13 | 2021-01-19 | Ethicon Llc | Ultrasonic assembly for use with ultrasonic surgical instruments |
| US10842522B2 (en) | 2016-07-15 | 2020-11-24 | Ethicon Llc | Ultrasonic surgical instruments having offset blades |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US10285723B2 (en) | 2016-08-09 | 2019-05-14 | Ethicon Llc | Ultrasonic surgical blade with improved heel portion |
| USD847990S1 (en) | 2016-08-16 | 2019-05-07 | Ethicon Llc | Surgical instrument |
| US10952759B2 (en) | 2016-08-25 | 2021-03-23 | Ethicon Llc | Tissue loading of a surgical instrument |
| US10420580B2 (en) | 2016-08-25 | 2019-09-24 | Ethicon Llc | Ultrasonic transducer for surgical instrument |
| US10603064B2 (en) | 2016-11-28 | 2020-03-31 | Ethicon Llc | Ultrasonic transducer |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US9968818B1 (en) * | 2016-12-28 | 2018-05-15 | Jose Vargas | Vehicle driver exercising system |
| US10820920B2 (en) | 2017-07-05 | 2020-11-03 | Ethicon Llc | Reusable ultrasonic medical devices and methods of their use |
| US11890743B2 (en) | 2017-07-14 | 2024-02-06 | Benoit Rolland | Handle compositions, methods of use and methods of making |
| WO2019045051A1 (ja) * | 2017-08-31 | 2019-03-07 | 国立大学法人 鹿児島大学 | 片麻痺前腕機能回復訓練装置及び方法 |
| JP6850236B2 (ja) * | 2017-09-29 | 2021-03-31 | 富士フイルム株式会社 | 内視鏡 |
| JP2019187649A (ja) * | 2018-04-20 | 2019-10-31 | 川崎重工業株式会社 | マスターアーム入力装置及びそれを備える手術システム |
| US10766131B2 (en) * | 2018-08-01 | 2020-09-08 | Alexander Deiser | Palmar grip |
| US20200069995A1 (en) * | 2018-09-05 | 2020-03-05 | Scot Zelazny | Winged ergonomically designed exercise grip support device |
| US20200077723A1 (en) * | 2018-09-12 | 2020-03-12 | RipGrip LLC | Sport glove with grip pads based on hand anatomy |
| CA3128839A1 (en) | 2019-02-04 | 2020-08-13 | New Growth Fitness LLC | Barbell grips |
| US20220370281A1 (en) * | 2019-05-07 | 2022-11-24 | Nami Khademhosseini | Crutch and sitting device |
| USD875857S1 (en) | 2019-06-01 | 2020-02-18 | New Growth Fitness LLC | Set of grips for an exercise bar |
| US11633658B2 (en) * | 2019-08-30 | 2023-04-25 | Jeremiah Raber | Weightlifting barbell roller and systems and methods for using the same |
| US11559366B2 (en) * | 2019-09-30 | 2023-01-24 | Cilag Gmbh International | Communicating closure effort for robotic surgical tools background |
| DE102019219489A1 (de) * | 2019-12-12 | 2021-06-17 | Hansgrohe Se | Sanitäre Auszugsschlaucharmatur |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US11744636B2 (en) | 2019-12-30 | 2023-09-05 | Cilag Gmbh International | Electrosurgical systems with integrated and external power sources |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11911063B2 (en) | 2019-12-30 | 2024-02-27 | Cilag Gmbh International | Techniques for detecting ultrasonic blade to electrode contact and reducing power to ultrasonic blade |
| US20210196363A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with electrodes operable in bipolar and monopolar modes |
| US11684412B2 (en) | 2019-12-30 | 2023-06-27 | Cilag Gmbh International | Surgical instrument with rotatable and articulatable surgical end effector |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US20210196361A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with monopolar and bipolar energy capabilities |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| US11331784B2 (en) | 2020-05-08 | 2022-05-17 | Edward P. Dyer | Ergonomic hand-held instrument |
| USD1020882S1 (en) | 2020-05-08 | 2024-04-02 | Edward P. Dyer | Ergonomic hand-held utility instrument with base system |
| CN112181045B (zh) * | 2020-09-22 | 2021-10-26 | 歌尔科技有限公司 | 手柄、操作杆阈值的调节方法、调节系统和调节装置 |
| US20230158381A1 (en) * | 2021-11-23 | 2023-05-25 | Oribi Manufacturing | Customizable variable profile lacrosse shafts and methods thereof |
| WO2024054869A1 (en) * | 2022-09-06 | 2024-03-14 | Paul Re | Athletic handle for decreasing hand injuries, improving swing and improving performance |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1229658A (en) * | 1913-09-04 | 1917-06-12 | Eugen Sandow | Dumb-bell. |
| US5031640A (en) * | 1989-11-22 | 1991-07-16 | Spitzer A Robert | Pad for preventing carpal tunnel syndrome |
| US5339850A (en) * | 1991-05-28 | 1994-08-23 | Guardian Products, Inc. | Orthopedic hand grip for ambulation aids, tools and other implements |
| US6012623A (en) * | 1998-05-22 | 2000-01-11 | Stanley Fastening Systems, Lp | Hammer-type stapler with canted drive track |
Family Cites Families (155)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US340382A (en) * | 1886-04-20 | Pen and brush holder | ||
| US336540A (en) * | 1886-02-16 | Bifurcated pen-holder | ||
| US288096A (en) | 1883-11-06 | Bichabd j | ||
| US43242A (en) * | 1864-06-21 | Meeeitt l | ||
| US700492A (en) * | 1900-07-17 | 1902-05-20 | Edward William Henstock | Pedal for velocipedes. |
| US825985A (en) * | 1905-08-21 | 1906-07-17 | Gustav Breymann De Schwertenberg | Holder for pens, pencils, and the like. |
| US987095A (en) * | 1910-10-20 | 1911-03-14 | Clipper Novelty Company | Fruit-clipper. |
| US1188394A (en) * | 1912-09-07 | 1916-06-27 | Michael Bernstein | Fountain-pen. |
| US1648354A (en) * | 1926-08-21 | 1927-11-08 | Ernst F Lied | Golf club |
| US1919968A (en) * | 1930-03-26 | 1933-07-25 | Frank W Trabold | Foot pedal |
| US1879456A (en) | 1930-10-17 | 1932-09-27 | John L Valley | Writing instrument |
| US2047635A (en) * | 1935-12-30 | 1936-07-14 | Eugene A Johst | Hand protector |
| US2370026A (en) * | 1943-04-30 | 1945-02-20 | Adolphe R Elia | Scissors or shears |
| US2621688A (en) | 1946-01-03 | 1952-12-16 | George F Wales | Lever arm screw driver and wrench |
| US2561941A (en) * | 1946-08-09 | 1951-07-24 | Walter E Selck And Co | Linoleum cutter |
| US2540255A (en) * | 1947-05-09 | 1951-02-06 | Graves Donald | Fruit clipper |
| US2669991A (en) * | 1951-12-27 | 1954-02-23 | Curutchet Pedro Domingo | Tetradigital grip for long lever pivoted surgical instruments |
| US2669993A (en) * | 1953-01-26 | 1954-02-23 | Pedro D Curutchet | Bicapsular grip for pivoted surgical instruments |
| US2975505A (en) * | 1955-05-10 | 1961-03-21 | William Freeman J | File holder |
| US3129939A (en) * | 1962-02-26 | 1964-04-21 | Herman E Stock | Exercising grip consisting of a rectangular pad of resiliently compressible material |
| US3407816A (en) | 1966-02-16 | 1968-10-29 | Curutchet Pedro Domingo | Surgical instrument handle |
| US3557792A (en) * | 1968-08-07 | 1971-01-26 | Frank F Rubin | Septal morselizer |
| US3741665A (en) * | 1970-08-25 | 1973-06-26 | Smagala Romanoff E | Writing implements |
| US3713350A (en) * | 1971-05-17 | 1973-01-30 | Schwinn Bicycle Co | Air cushion handlebar grip |
| US3972333A (en) * | 1973-03-02 | 1976-08-03 | Leveen Harry H | Disposable surgical tool |
| US4043343A (en) * | 1975-08-01 | 1977-08-23 | Williams Robert W | Forceps |
| US4127338A (en) | 1976-10-27 | 1978-11-28 | Laybourne Sidney C | Writing instrument |
| US4097951A (en) * | 1977-03-28 | 1978-07-04 | Hurtt Jesse J | Spreader having integrally molded deformable handle and bendable blade |
| US4161051A (en) * | 1977-04-19 | 1979-07-17 | Bernard Brodwin | Contoured handle |
| DE3103352C2 (de) * | 1981-01-31 | 1982-10-21 | Aesculap-Werke Ag Vormals Jetter & Scheerer, 7200 Tuttlingen | Pinzetten- oder zangenförmiges chirurgisches Instrument |
| US4413034A (en) | 1982-03-02 | 1983-11-01 | Anderson Chester L | Record handler |
| FR2526748B1 (fr) * | 1982-05-12 | 1987-05-29 | Christol Lilian | Dispositif de pedalage pour cycle et chaussure adaptee |
| JPS59135076A (ja) | 1983-01-21 | 1984-08-03 | 株式会社 都筑製作所 | 握力増進用の訓練器具 |
| US4553746A (en) | 1983-08-19 | 1985-11-19 | Valerie Holdeman Lee | Hand exerciser |
| US4599920A (en) * | 1983-08-22 | 1986-07-15 | Orthopedic Design, Inc. | Power grip insert |
| US4599915A (en) * | 1984-01-06 | 1986-07-15 | Harry F. Hlavac | Adjustable pedal |
| GB2153540B (en) * | 1984-01-24 | 1987-12-02 | Mie Medical Research | Apparatus for measurement of grip strength |
| US4644651A (en) * | 1984-03-19 | 1987-02-24 | Jacobsen Research Corp. | Instrument for gripping or cutting |
| US4572227A (en) * | 1984-10-01 | 1986-02-25 | W. K. Wheeler, Inc. | Handgrip for a crutch |
| USD292297S (en) | 1985-02-15 | 1987-10-13 | Bingham R Larry | Compact, retractable pen |
| US4641857A (en) * | 1985-06-28 | 1987-02-10 | Gailiunas Ernest A | Ski pole hand grip |
| US4674501A (en) * | 1986-04-14 | 1987-06-23 | Greenberg I Melbourne | Surgical instrument |
| US4877280A (en) | 1986-05-02 | 1989-10-31 | Reed Milano | Paper pick-up device |
| US5024119A (en) * | 1986-05-28 | 1991-06-18 | Linden Paul R | Bicycle handlebars |
| DE3630210A1 (de) * | 1986-09-04 | 1988-03-17 | Wisap Gmbh | Instrumentengriff |
| US4850355A (en) * | 1987-04-06 | 1989-07-25 | Richard-Allan Medical Industries, Inc. | Hemostatic clip applicator for applying multiple hemostatic clips |
| US4785495A (en) | 1987-08-17 | 1988-11-22 | Dellis Edward A | Moldable hand grips |
| FR2620412B1 (fr) * | 1987-09-10 | 1989-12-01 | Manoel Bouchet | Ensemble de pedalage pour bicyclette |
| US4798377A (en) * | 1987-11-16 | 1989-01-17 | White James P | Bicycle handle bar grip with exercise |
| FR2625428A1 (fr) * | 1988-01-05 | 1989-07-07 | Sinergy Sa | Dispositif de coelioscopie operatoire multifonctionnel permettant d'effectuer differents gestes operatoires avec introduction d'instruments |
| US4802704A (en) * | 1988-03-11 | 1989-02-07 | Burns Thomas P | Spare rib holder |
| US4941460A (en) * | 1988-06-20 | 1990-07-17 | Loren Working | Carpal brace |
| US5047046A (en) | 1988-07-13 | 1991-09-10 | Bodoia Rodger D | Surgical forceps |
| US4885818A (en) * | 1988-07-15 | 1989-12-12 | Arterbury Travis W | Ergonomic knife and knife handle |
| US4962747A (en) | 1989-02-17 | 1990-10-16 | Biller Alfred B | Speargun trigger mechanism |
| US5653713A (en) * | 1989-04-24 | 1997-08-05 | Michelson; Gary Karlin | Surgical rongeur |
| US5047049A (en) | 1989-05-24 | 1991-09-10 | Salai Diane L | Self orienting instrument handle |
| US4989511A (en) * | 1989-05-26 | 1991-02-05 | Flexible Products Company | Handle for a squeegee |
| US5146810A (en) | 1989-06-16 | 1992-09-15 | Mueller Lawrence P | Grip system for hand tools and instruments |
| US5046381A (en) | 1989-06-16 | 1991-09-10 | Lawrence P. Mueller | Grip system for hand tools and instruments |
| JPH0328541U (zh) * | 1989-07-20 | 1991-03-22 | ||
| US5002561A (en) * | 1989-08-17 | 1991-03-26 | Fisher Frank E | Protective hand forceps |
| US5044058A (en) | 1989-08-24 | 1991-09-03 | Voss Barbara A | Bulb insertion and removal tool |
| US5076569A (en) * | 1989-09-15 | 1991-12-31 | Gootter Steven M | Contoured grip for exercising the hand |
| US5046722A (en) | 1989-10-16 | 1991-09-10 | Antoon John M | Exercising device |
| EP0435521B1 (en) * | 1989-12-15 | 1994-06-22 | Atuhiko Sato | Finger training device |
| US5005674A (en) * | 1990-02-05 | 1991-04-09 | Piatt John A | Bi-directional rotating grip brake for use with a conventional hand brake system of a bicycle |
| JPH03107391U (zh) * | 1990-02-20 | 1991-11-05 | ||
| US5125878A (en) * | 1990-08-30 | 1992-06-30 | Meddev Corporation | Hand exercising apparatus |
| US5143463A (en) | 1990-12-24 | 1992-09-01 | Pozil Richard L | Writing aid |
| US6036385A (en) * | 1991-02-07 | 2000-03-14 | Bistrack; Carl | Adaptable pressure writing instrument holder |
| USD339468S (en) * | 1991-05-28 | 1993-09-21 | Guardian Products, Inc. | Handle for ambulatory aid |
| NO172974C (no) | 1991-08-16 | 1993-10-06 | Rune Angeltun | Sykkelpedal |
| US5146809A (en) | 1991-08-26 | 1992-09-15 | Ruana Bruce M | Method of shaping a bicycle handlebar and apparatus therefore |
| US5160343A (en) | 1991-09-09 | 1992-11-03 | Dexide, Inc. | Surgical instruments handle and forceps assembly |
| FR2681223B1 (fr) | 1991-09-13 | 1993-12-24 | Francois Denjean | Dispositif d'aide a la marche, de type bequille ou canne anglaise. |
| US5159851A (en) | 1991-09-18 | 1992-11-03 | Paul Rahmes | Bicycle grip |
| US5199324A (en) * | 1991-09-19 | 1993-04-06 | Saisan Partners | Adjustably variable pedal apparatus and method |
| US5176696A (en) * | 1991-09-30 | 1993-01-05 | Saunders Myles L | Handles for microsurgical instruments |
| US5147380A (en) | 1991-10-03 | 1992-09-15 | Cordis Corporation | Biopsy forceps device having improved locking means |
| WO1993011454A1 (en) * | 1991-11-28 | 1993-06-10 | The University Of Melbourne | Binocular bent-axis loupes |
| RU2022799C1 (ru) * | 1992-01-13 | 1994-11-15 | Алексей Евгеньевич Горбунов | Пишущее устройство горбунова |
| US5318589A (en) * | 1992-04-15 | 1994-06-07 | Microsurge, Inc. | Surgical instrument for endoscopic surgery |
| US5184625A (en) * | 1992-04-16 | 1993-02-09 | Cordis Corporation | Biopsy forceps device having improved handle |
| US5353474A (en) * | 1992-05-01 | 1994-10-11 | Good Wayne T | Transferrable personalized grip for a handle assembly and method for making same |
| US5211655A (en) * | 1992-05-08 | 1993-05-18 | Hasson Harrith M | Multiple use forceps for endoscopy |
| US5299497A (en) * | 1992-05-11 | 1994-04-05 | Gb Products International Corp. | Handle structure for a stamping device |
| US5234460A (en) * | 1992-06-24 | 1993-08-10 | Stouder Jr Albert E | Laparoscopy instrument |
| US5230704A (en) * | 1992-06-26 | 1993-07-27 | Biomedical Dynamics Corporation | Suction/irrigation instrument having reusable handle with disposable fluid path |
| WO1994000305A1 (en) | 1992-06-30 | 1994-01-06 | Rubin Burton S | Ergonomic hand-held implement |
| US5606985A (en) * | 1992-11-16 | 1997-03-04 | Tubular Fabricators Industry, Inc. | Crutch with adjustable inclined hand grip |
| US5277683A (en) * | 1992-12-03 | 1994-01-11 | Chester Wilkins | Total gym |
| US5417234A (en) * | 1993-02-17 | 1995-05-23 | Trek Medical Corporation | Crutch |
| US5379758A (en) * | 1993-03-23 | 1995-01-10 | Snyder; Samuel J. | Hand held surgical retractor |
| US5366476A (en) | 1993-04-02 | 1994-11-22 | Laparomed Corporation | Handle for laparoscopic instrument |
| US5785443A (en) * | 1993-04-20 | 1998-07-28 | Evo Pen Inc. | Ergonomic snap-fit cartridge pen |
| US5797165A (en) * | 1993-05-14 | 1998-08-25 | Armbrust; Ronald Oran | Exercise grip for attachment to handlebars |
| US5498256A (en) * | 1993-05-28 | 1996-03-12 | Snowden-Pencer, Inc. | Surgical instrument handle |
| US5540304A (en) * | 1993-06-24 | 1996-07-30 | Hawkins; Rollin D. | Single-handled vehicle brake system |
| US5495867A (en) * | 1993-11-16 | 1996-03-05 | Momentum Medical Corp. | Dual handled cane |
| AUPM456494A0 (en) * | 1994-03-17 | 1994-04-14 | Noble House Group Pty Ltd | Scalpel |
| US5578050A (en) | 1994-04-04 | 1996-11-26 | Webb; Nicholas J. | Ergonomic surgical scalpel sleeve |
| US5522290A (en) * | 1994-04-18 | 1996-06-04 | Visser; Steven C. | Compliant pliers |
| US5423531A (en) * | 1994-07-01 | 1995-06-13 | Hoshizaki; T. Blaine | Hockey stick handle |
| US5470328A (en) | 1994-07-21 | 1995-11-28 | Snowden-Pencer, Inc. | Surgical instrument handle and actuator means |
| US5445479A (en) * | 1994-08-17 | 1995-08-29 | Hillinger; George | Ergonomically designed, electrically energized hand drill having a housing, longitudinally aligned with a hand, wrist and forearm support |
| US5454380A (en) | 1994-09-15 | 1995-10-03 | Gates; Randy J. | Ergonomic hand support for use during a work operation to prevent the risk of adverse medical conditions, such as carpal tunnel syndrome |
| US5556092A (en) | 1994-10-24 | 1996-09-17 | Theken; Randall R. | Ergonomic handle |
| US5692265A (en) | 1994-10-28 | 1997-12-02 | Dalury; David F. | Ergonometric handle |
| US5771490A (en) * | 1994-12-30 | 1998-06-30 | Ergoair Inc. | Hand and handle covering with vibration-reducing bladder |
| US5805256A (en) * | 1995-02-27 | 1998-09-08 | Miller; William | Remote control with a thumbswitch for controlling equipment that handles video or audio signals |
| US5571127A (en) | 1995-03-08 | 1996-11-05 | Decampli; William M. | Scalpel handle having retractable blade support and method of use |
| EP0812283A4 (en) * | 1995-03-17 | 1999-05-12 | Sarun Holdings Limited | IMPROVED BRAKE SYSTEM FOR BICYCLES AND OTHER CHAIN DRIVE MECHANISMS |
| US5554132A (en) | 1995-03-30 | 1996-09-10 | Abbott Laboratories | Hand grip for use with syringe |
| JP2656755B2 (ja) * | 1995-05-29 | 1997-09-24 | 静岡日本電気株式会社 | Isdnターミナルアダプタ |
| US5935149A (en) * | 1995-06-07 | 1999-08-10 | Smith & Nephew Inc. | Suturing tissue |
| JP2786830B2 (ja) * | 1995-06-07 | 1998-08-13 | 義弘 佐藤 | 指ガイド付き筆記具 |
| US5634382A (en) * | 1995-07-26 | 1997-06-03 | Fan; Jeeng-Neng | Simple and improved structure of an ergonomic device for bicycles |
| EP0840668A1 (en) * | 1995-07-27 | 1998-05-13 | THE GOVERNMENT OF THE UNITED STATES OF AMERICA, as represented by The Secretary, Department of Health and Human Services | Ergonomic handle for terminal insertion tool |
| US5562693A (en) | 1995-08-11 | 1996-10-08 | Alcon Laboratories, Inc. | Cutting blade assembly for a surgical scissors |
| US5791671A (en) * | 1995-09-08 | 1998-08-11 | Bear Corporation | Preloading and cable routing assembly and rotatable brake cable coupling system |
| US5660082A (en) * | 1995-10-19 | 1997-08-26 | Hsieh; Wen Cheng | Adjustable brake control for a bicycle |
| US5850663A (en) * | 1996-02-07 | 1998-12-22 | Hyde Manufacturing Co. | Ergonomic tool handle |
| US5659959A (en) * | 1996-02-23 | 1997-08-26 | General Housewares Corp. | Shears with rotatable handle |
| US5761767A (en) * | 1996-03-21 | 1998-06-09 | Barton; Thomas J. | Handle |
| US5893877A (en) * | 1996-04-10 | 1999-04-13 | Synergetics, Inc. | Surgical instrument with offset handle |
| US5728121A (en) * | 1996-04-17 | 1998-03-17 | Teleflex Medical, Inc. | Surgical grasper devices |
| US5797900A (en) * | 1996-05-20 | 1998-08-25 | Intuitive Surgical, Inc. | Wrist mechanism for surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5897571A (en) * | 1996-07-22 | 1999-04-27 | Kazama; Shigeru | Forceps |
| US5782853A (en) * | 1996-09-13 | 1998-07-21 | Zeevi; Eli I. | Surgical handle for surgical blades and punches |
| US6063087A (en) * | 1996-09-23 | 2000-05-16 | John M. Agee | Method and apparatus for increasing the range of motion of fingers suffering from a limited range of motion, through an external force transmitted to the skeleton |
| JP3376223B2 (ja) * | 1996-11-08 | 2003-02-10 | キヤノン株式会社 | 記録ヘッド補正方法及びその装置 |
| US5735873A (en) * | 1996-12-19 | 1998-04-07 | Maclean; David S. | Surgical tool handle |
| US5979015A (en) * | 1996-12-27 | 1999-11-09 | Tamaribuchi; Stephen K. | Ergonomic hand grip and method of gripping |
| US5829099A (en) * | 1997-04-14 | 1998-11-03 | Kopelman; Larry J. | Universal ergonomic handle |
| US5896620A (en) * | 1997-04-15 | 1999-04-27 | F. M. Brush Co., Inc. | Easy grip brush handle |
| US6217536B1 (en) * | 1997-05-22 | 2001-04-17 | Norman P. Gustafson | Apparatus for reducing median nerve compression and an associated method |
| IT1292016B1 (it) * | 1997-05-28 | 1999-01-25 | Valerio Cigaina | Dispositivo di impianto particolarmente per elettrostimolazione e/o elettroregistrazione di visceri endoaddominali |
| US6079523A (en) * | 1997-09-17 | 2000-06-27 | Irvine; Mark W. | Bicycle hand brake |
| US6030409A (en) * | 1997-11-08 | 2000-02-29 | Lang; Dieter | Medical forceps |
| US6042559A (en) * | 1998-02-24 | 2000-03-28 | Innercool Therapies, Inc. | Insulated catheter for selective organ perfusion |
| US6024737A (en) * | 1998-02-25 | 2000-02-15 | Advanced Cardiovascular Systems, Inc. | Stent crimping device |
| US6079298A (en) * | 1998-03-18 | 2000-06-27 | Snap-On Tools Company | Ergonomic handle and driver incorporating same |
| US5908432A (en) * | 1998-03-27 | 1999-06-01 | Pan; Huai C. | Scalpel with retractable blade |
| US5920944A (en) * | 1998-05-04 | 1999-07-13 | Biggs; Blyth S. | Ergonomic mop apparatus |
| US6012194A (en) * | 1998-09-10 | 2000-01-11 | Eshbach; Douglas | Paint brush handle |
| JP3058776U (ja) * | 1998-10-29 | 1999-06-22 | モリト株式会社 | 筆記具 |
| US6213055B1 (en) * | 1998-12-21 | 2001-04-10 | J. W. Pet Company | Ergonomic handle for grooming brush |
| US6085611A (en) * | 1999-02-01 | 2000-07-11 | Bear Corporation | Bicycle brake cable system |
| DE10032524B4 (de) * | 1999-07-09 | 2006-05-24 | Liao, Daocheng, Dongguan | Klapprad |
| US6272754B1 (en) * | 1999-09-27 | 2001-08-14 | Jameson Corporation | Retrofit handle attachment for scissors |
| US6343885B1 (en) * | 2000-09-19 | 2002-02-05 | David G. Heyne | Writing instrument with hand grip |
| US6427565B1 (en) * | 2000-11-14 | 2002-08-06 | Great Neck Saw Manufacturers, Inc. | Parallel grip plier |
| US6530125B2 (en) * | 2001-07-06 | 2003-03-11 | Ronald D. Shippert | Multi-plane gripping handle |
| US6592160B1 (en) * | 2001-12-26 | 2003-07-15 | Nicolay Family Enterprises, L.L.C. | Tool handle |
-
2002
- 2002-10-24 EP EP02786482A patent/EP1482818A4/en not_active Withdrawn
- 2002-10-24 AU AU2002349897A patent/AU2002349897B2/en not_active Ceased
- 2002-10-24 CA CA002463903A patent/CA2463903A1/en not_active Abandoned
- 2002-10-24 MX MXPA04003903A patent/MXPA04003903A/es active IP Right Grant
- 2002-10-24 WO PCT/US2002/033956 patent/WO2003035331A2/en active Application Filing
- 2002-10-24 CN CNB028260554A patent/CN1310604C/zh not_active Expired - Fee Related
- 2002-10-24 US US10/279,111 patent/US6988295B2/en not_active Expired - Fee Related
- 2002-10-24 JP JP2003537876A patent/JP2006507015A/ja active Pending
-
2005
- 2005-08-15 US US11/203,303 patent/US20050278897A1/en not_active Abandoned
- 2005-08-16 US US11/204,122 patent/US7506409B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1229658A (en) * | 1913-09-04 | 1917-06-12 | Eugen Sandow | Dumb-bell. |
| US5031640A (en) * | 1989-11-22 | 1991-07-16 | Spitzer A Robert | Pad for preventing carpal tunnel syndrome |
| US5339850A (en) * | 1991-05-28 | 1994-08-23 | Guardian Products, Inc. | Orthopedic hand grip for ambulation aids, tools and other implements |
| US6012623A (en) * | 1998-05-22 | 2000-01-11 | Stanley Fastening Systems, Lp | Hammer-type stapler with canted drive track |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050278897A1 (en) | 2005-12-22 |
| US20030074766A1 (en) | 2003-04-24 |
| AU2002349897B2 (en) | 2008-11-20 |
| WO2003035331A2 (en) | 2003-05-01 |
| JP2006507015A (ja) | 2006-03-02 |
| US6988295B2 (en) | 2006-01-24 |
| US7506409B2 (en) | 2009-03-24 |
| US20050278898A1 (en) | 2005-12-22 |
| CN1607913A (zh) | 2005-04-20 |
| CA2463903A1 (en) | 2003-05-01 |
| EP1482818A4 (en) | 2009-02-11 |
| EP1482818A2 (en) | 2004-12-08 |
| WO2003035331A3 (en) | 2004-10-07 |
| MXPA04003903A (es) | 2004-07-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1310604C (zh) | 手柄/把手及其设计方法 | |
| EP1832318A2 (en) | A handle/grip and method for designing the like | |
| AU2002349897A1 (en) | A handle/grip and method for designing the like | |
| Marzke et al. | Hominid hand use in the Pliocene and Pleistocene: evidence from experimental archaeology and comparative morphology | |
| US8549712B2 (en) | Tool handle | |
| US20050267519A1 (en) | Handle for forceps/tweezers and method and apparatus for designing the like | |
| WO1999026516A1 (en) | Ergonometric handle | |
| US20180169852A1 (en) | Customizable And Ergonomic Handle | |
| US20090084803A1 (en) | Cookware Handle With a Hollow Structure | |
| US20130125909A1 (en) | Cuticle pusher | |
| CN106142569A (zh) | 一种基于3d打印的行走辅助器具把手的制造方法 | |
| CN100577117C (zh) | 钳子/镊子用的把柄及其设计方法和装置 | |
| US9993917B1 (en) | Handgrip for cleaning tool handles | |
| JP2020151838A (ja) | グリップ、グリップの形状 | |
| JP6943550B2 (ja) | マウス | |
| JP6746181B1 (ja) | 杖及び杖用のグリップ | |
| AU2003225129B2 (en) | Handle for forceps/tweezers and method and apparatus for designing the like | |
| WO2021040054A1 (ja) | 杖及び杖用の足部 | |
| Howale et al. | In Relation with Evolutionary Development-the Study of Differences Between the Chimpanzee Thumb and the Human Thumb | |
| WO2021040053A1 (ja) | 杖及び杖用のシャフト | |
| JP7402477B2 (ja) | 杖及び杖用の足部 | |
| Wang | EGO 2026 leaf blower concept-conceptual product design optimization based on human ergonomic and engineering | |
| Redfern et al. | The quantification of synergistic and antagonistic activity during isometric torque generation about the ankle | |
| Buchholz et al. | A biomechanical model of prehension based on kinematic considerations | |
| ITFI20030114U1 (it) | Manico anatomico per bisturi chirurgico di precisione |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20070418 Termination date: 20091124 |