CN1554112A - 晶片传送设备 - Google Patents
晶片传送设备 Download PDFInfo
- Publication number
- CN1554112A CN1554112A CNA028176804A CN02817680A CN1554112A CN 1554112 A CN1554112 A CN 1554112A CN A028176804 A CNA028176804 A CN A028176804A CN 02817680 A CN02817680 A CN 02817680A CN 1554112 A CN1554112 A CN 1554112A
- Authority
- CN
- China
- Prior art keywords
- arm
- connecting rod
- robot arm
- cam
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0093—Programme-controlled manipulators co-operating with conveyor means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/6719—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the processing chambers, e.g. modular processing chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67201—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the load-lock chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67745—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber characterized by movements or sequence of movements of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67748—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber horizontal transfer of a single workpiece
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/139—Associated with semiconductor wafer handling including wafer charging or discharging means for vacuum chamber
Abstract
一种负载锁定室组件,包括负载锁定室、可拆卸地固定到该负载锁定室上的子室以及在子室内的具有初级枢轴的第一自动臂,其中第一自动臂可将衬底从大致负载锁定室中心的位置移动到负载锁定室外部的位置。
Description
发明领域
本发明涉及一种真空传送设备,特别涉及一种用于在两个具有不同压力的区域之间传送衬底而且基本上不会影响每个区域的压力的工艺和设备。
发明背景
半导体刻蚀、清洗和淀积工艺通常采用希望在减压下例如在被排气(真空)室中进行的等离子体中间工艺。保持室内的压力在特殊预定范围内是非常重要的,以便避免半导体晶片制造工艺中的昂贵延迟和使制造的半导体晶片产品的质量的不希望的变化最小化。保持压力在预定范围内是很困难的,因为在器件制造期间,在连续或批量处理中从在大气条件下工作的外部源向处理室中连续地馈送衬底。为输送到处理室内的每个衬底或批量衬底控制和校准室压力所需要的时间大大增加了处理时间。由于控制和重新校准压力导致的产量减小提高了总器件成本。
室辅助操作时间(overhead time)定义为涉及处理室的任何操作但不包括实际晶片处理时间所需要的时间。处理室辅助操作时间通常包括在交换每个晶片之后用于将处理室内的压力减小到所希望的处理压力,将晶片加热到预定温度,给处理室排气以便允许交换晶片和晶片本身交换的时间周期。使辅助操作时间最小将会提高生产率和降低总器件成本。
用于将半导体晶片送进或送出用于连续处理的处理室同时不破坏或影响室压力的设备和方法有很多。很多这种装置教导人们在与处理室的可操作连通中使用气锁室,即负载锁定室。这种负载锁定室可以被调整以匹配处理室内的工作压力,由此允许将衬底送进或送出处理室同时还允许处理室保持相对恒定的压力。在这些器件中,自动装置一般用做单臂,它的行程以基本线性方式移动晶片。该单臂传送路径构成为使得晶片的中心轴在中心自动臂枢轴上或附近通过。这种枢轴通常安装在负载锁定室的中心,因为物理尺寸受到自动连杆臂设计和相关的连杆臂行程的限制。结果是,这些类型的传送机构具有在负载锁定室组件中的过量内部室体积,这是由于传送机构所需要的传送臂路径。而且,由于连杆臂的初级或第一枢轴位于负载锁定室内的中心,因此维修和接触该设备是很困难的。而且,现有技术通常采用连接到步进电机驱动输出轴的定时传送带和滑轮装置以及连接到第一连杆臂轴的套筒的复杂系统,以便实现臂的旋转。
例如,授予Richards的美国专利US4584045公开了在晶片定位传送设备中使用传送带驱动。通过在传送机构的臂之一中使用弹簧存在问题。由于传送带磨损或伸长,弹簧延长臂以保持传送带拉紧。这改变了半导体晶片在室中的位置。晶片定位装置在该装置操作的所有阶段都必须是非常精确定位的。改变了定位的这种磨损是不希望的。
在授予Lada的美国专利US4728252中,公开了一种复杂晶片传送机构。这篇专利的装置具有在另一轴内密封的一个轴,该轴独立于外轴旋转。复杂的密封机构固有地将该装置暴露于潜在的故障和损坏。而且,该装置采用传送带并需要两个电机和两个电机控制电路,具有附加的导线系统等。这种装置的复杂性使其昂贵。而且,使用传送带将增加损坏或磨损的潜在性,产生污染。此外,随着传送带磨损或伸长,必须在规则基础上替换它们,这都是为了保持该装置的工作精度以及保持该设备内的污染颗粒的数量减少。替换传送带将产生用于该系统的附加维修成本和不希望的减少的时间。
发明内容
一种用于在具有不同压力的两个区域之间传送衬底晶片同时基本上不影响每个区域的压力的传送设备和工艺包括连接到处理室的负载锁定室组件。该负载锁定室组件包括负载锁定室和与该负载锁定室连通的子室。负载锁定室连接到处理室并包括在其间的可封闭端口。
子室包括具有在子室内的初级枢轴的第一自动臂,其中第一自动臂可以将衬底从负载锁定室的大致中心的位置移动到负载锁定室外部的位置。
第一自动臂包括第一端效应器,用于在两个区域之间传送衬底期间保持衬底。
第一自动臂安装在可旋转轴套上并包括第一连杆臂,第一连杆臂包括具有第一端和第二端的细长外壳,其中第一连杆臂包括设置在外壳内的第一凸轮和被第一凸轮驱动的第一四杆连杆机构。第一凸轮牢固地连接到同轴地安装在轴套内的轴上,其中该轴限定了自动臂的初级枢轴。第一自动臂还包括可旋转地连接到第一连杆臂的第二端并具有固定到转换臂的一端的第一端效应器的第一转换臂,其中第一连杆臂围绕轴的旋转使第一四杆连杆机构与第一凸轮配合并围绕次级枢轴旋转地移动第一转换臂。连杆臂和转换臂在子室内完全配合。
第一四杆连杆机构包括连接到第一凸轮的第一凸轮跟随器、连接到第一凸轮跟随器的第一驱动器连杆以及连接到第一驱动器连杆和第一连杆臂的第一摇臂连杆。第一摇臂连杆包括摇臂和弹簧,其中弹簧连接到第一连杆臂的外壳和摇臂,并且摇臂可调地连接到该驱动器连杆。
在优选实施例中,负载锁定室组件包括围绕初级枢轴可旋转的第二自动臂。第一和第二自动臂可彼此独立地旋转并且能将一个衬底放进处理室,同时从处理室取出另一衬底。第一和第二自动臂在子室内完全配合。
负载锁定室组件还包括用于沿着初级枢轴垂直地移动第一和第二臂的第一电机、用于围绕初级枢轴旋转第一自动臂的第二电机和用于围绕初级枢轴旋转第二自动臂的第三电机。
用于在具有不同压力的区域之间传送衬底而基本上不影响每个区域的压力的工艺包括:在连接到负载锁定室的可拆卸子室内安装第一和第二自动臂。第一和第二臂包括在子室内的初级枢轴。有源晶片在预定工作压力的处理室中被处理,其中处理室连接到负载锁定室并包括可封闭端口。利用第一自动臂将有源晶片从处理室取出,并且利用第二自动臂在处理室的工作压力下将第一排晶片设置在处理室中。端口封闭并且在工作压力下在处理室中处理第一排晶片,同时负载锁定室被排气,用于从负载锁定室外部接收第二排晶片。然后将负载锁定室内的压力减小到工作压力并且端口打开。利用第一自动臂从处理室取出第一排晶片(正在处理的),利用第二自动臂将第二排晶片设置到处理室中。
应该明白前面一般性的说明和下面的详细说明都是示意性的,趋于提供所要求保护的本发明的进一步解释。
附图简述
附图提供本发明的进一步理解并结合在本说明书中构成本说明书的一部分,并与文字说明一起表示本发明的实施例,以便解释本发明的原理。
附图中:
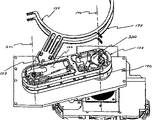
图1A,图1B和图2表示包括负载锁定室和处理室的晶片传送设备的透视图。
图3表示负载锁定室和处理室的顶部平面图。
图4表示负载锁定室和处理室的横截面图。
图5表示负载锁定室和处理室的侧向剖面图。
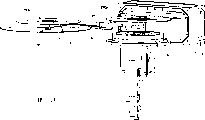
图6(a,b)表示晶片传送设备的部分透视图。
图7表示上连杆臂和上转换臂的部分分解透视图。
图8表示上连杆臂的顶部平面图。
图9、图10A、10B和图11表示上和下连杆臂组件的剖面图。
图12表示电机驱动组件的透视图。
图13-图28逐级表示用于从负载锁定室组件将晶片送进和送出处理室的工艺的透视图。
优选实施例的详细说明
下面介绍在真空下用于将晶片换进和换出处理室的设备和方法。该设备一般包括与处理室可操作连通的负载锁定室。负载锁定室和处理室之间的可操作连通允许在这两个室之间交换晶片,而不会升高处理室内的压力。在真空处理室中处理有源晶片时,例如等离子体中间处理,负载锁定室被排气到大气压,以便允许其它晶片排列好并装载到负载锁定室中。一旦排列好的晶片装载到负载锁定室中,负载锁定室压力减小到处理室的工作压力。在处理室中完成有源晶片的处理之后,取出有源晶片并与负载锁定室中排列好的晶片交换。然后在处理室中相应地处理排列好的晶片,先前处理过的有源晶片从负载锁定室中取出并与待处理其它晶片交换。必要时可重复这种循环。
有利地,由于处理室的工作压力连续保持,因此实现了提高的产量。例如,光刻胶剥离工艺、刻蚀后残余物去除和各向同性刻蚀工艺通常要求处理室被抽真空到约1托到约10托的压力范围。在处理室内恒定地保持该工作压力提高了工具的制造性和处理一致性。在将晶片从具有预定压力范围的负载锁定室送进和送出处理室时,不再需要用于处理室的泵送和通气步骤,由此提高晶片的产量。通过这种方式,负载锁定室双重地用做传送室和负载锁定室。
下面将参照附图详细介绍本发明的最佳实施例,本发明的例子示于附图中。
图1和2表示设备100的透视图,它包括负载锁定室组件102和处理室104。设备100不限于所示的特殊结构。鉴于本公开的其它变化和结构对于本领域普通技术人员来说是显而易见的。如从这些附图所看到的,设备100安装在可移动小车106上,可移动小车106包括排气系统108和与负载锁定室组件102连通的真空泵系统110。
图3示出了负载锁定室组件102和处理室104的顶部平面图。负载锁定室组件102和处理室104互连,其中可封闭的真空密封开口114设置和构成为用于允许晶片在两个室之间交换。如图所示,开口114构成为用于允许单晶片通过它。或者,开口114的大小和结构允许两个晶片同时通过,例如从处理室出来的被处理晶片和进入处理室的未处理晶片。负载锁定室组件102一般包括可拆卸子室116和室118。子室116可拆卸地固定于室118的壁上,并含有双端效应器晶片传送机构。如下面进一步的说明,双端效应器传送机构可自动地将晶片通过开口114送入和送出室118和104。由于接合臂位于固定于负载锁定室118的可拆卸子室116中,因此简化了自动臂的安装和维修。
双端效应器晶片传送机构包括共享公共枢轴140的上连杆臂120和下连杆臂130,这些连杆臂围绕该枢轴140接合。上连杆臂120的末端可旋转地连接到上转换臂122,该上转换臂122包括用于保持晶片或衬底(未示出)的上端效应器124。同样构成的下连杆臂130的末端可旋转地连接到下部转换臂(translating arm)132,该下转换臂包括下端效应器134。使用双端效应器124和134允许负载锁定室102在与处理室104的晶片交换操作途中同时含有两个晶片,由此允许高产量。夹具142大致安装在室118的中心,如果需要的话,在x-y平面内可手动调节。在最佳实施例中,夹具142用做冷板。
现在参见图4,处理室104与负载锁定室组件102由门阀150分开。处理室104包括两个晶片支撑钉(晶片钉)190和192,用于在处理期间支撑晶片194。热电偶193提供对晶片的附加支撑并提供用于测量晶片温度的装置。负载锁定室组件102包括夹子152、长对准钉154、短对准钉156和任选的冷板组件160,该冷板组件160包括安装在其上的冷板夹具142。此外,负载锁定室组件102包括室腿162、门组件164、和门支架166。O形环170设置在该结构内,以便密封负载锁定室118。从这个横截面图进一步看出,冷板142采用螺钉184在水平(x-y)方向可调。对冷板的x-y平面调节机构可包括该图中未示出的附加螺钉,用于更精细地调节控制。
图5是负载锁定室102的侧向横截面图。负载锁定室102包括安装在其上的可拆卸盖子103。子室116也包括固定于其上的可拆卸盖子117。在该图中,在图的右侧可看到上自动臂120和下自动臂130的横截面。该图还示出了用于激励双端效应器晶片传送机构的电机组件的一些部件,其包括自动平台200、自动适配器板202、线性轴组件204、线性滑动装置208和电机驱动组件206。
图6表示用于接合双端效应器晶片传送机构的上和下自动臂120、130的第一电机210、第二电机212和第三电机214的部分透视图。第一电机210即z轴电机用于沿着它们的各自初级或第一旋转轴140在垂直或z轴方向平行地驱动上120和下传送臂组件130。第二电机212围绕它的初级枢轴140或可旋转地围绕z轴驱动下连杆臂130。第三电机214以与第二电机相同的方式围绕初级枢轴140驱动上连杆臂120。优选地,这些电机是DC伺服机构或步进电机。
图7-8表示上部自动臂120的平面图和透视图。臂120包括具有可拆卸两片式盖子127和128(见图3)的细长外壳126。下连杆臂130具有相同的结构和相同方式的功能。由于它们彼此结构相同,因此自动臂机构120、122、124和130、132、134具有由相同的参考标记表示的相应部件,除了特殊指出的之外。相应地,下面的说明主要涉及上部自动臂机构的结构和操作,但是可同样适用于下部自动臂机构。
用于上连杆臂120的两片式盖子127和128允许操作者容易接近下部机构。盖件127提供到初级枢轴140处机构的入口,而盖件128提供到次级枢轴230处机构的入口。优选使用O形环(未示出)密封自动臂120的内部容积。围绕初级枢轴140,上自动臂120包括凸轮220和凸轮跟随臂222。该凸轮跟随臂222包括用于接触凸轮220的轮廓的轴承223。细长的臂驱动器224在一端固定于凸轮跟随器222,并在其另一端通过叉子232固定到摇臂226。叉子232和上部驱动器臂224具有互补螺纹,允许驱动器臂224的拉力调节。摇臂226安装在轴承板234的下面。上连杆臂120围绕枢轴140的旋转机械地移动凸轮跟随臂222,以至于上转换臂122围绕次级枢轴230在上自动臂120(远离枢轴230)的肘管中旋转。复位弹簧264用于连接摇臂226与自动臂的外壳126。自动臂的末端还包括螺纹孔236、旋转密封件238、轴承240和枢轴板248,用于将转换臂122或132旋转地连接到各个连杆臂120或132(图10中所示)。
复位弹簧264允许凸轮跟随器253在连杆臂旋转期间保持与凸轮220的不回转的外形接触。因此,复位弹簧保持在该系统上的恒定负载,以便除去连杆组件内的任何制造或机械公差。有利地,使用如图所示的复位弹簧264不需要转换臂与连杆臂的电气或机械连接,以至于在机构设置和安装期间或在晶片破裂或位移时转换臂可以独立于曲柄臂移动。
图9-11表示连接到旋转轴组件的上和下自动臂120和130的横截面图。如从这些图看到的,下连杆臂130也具有功能与上凸轮220相同的下凸轮218。凸轮218、220与初级枢轴140同轴设置,并且相对于上和下连杆臂120、130旋转地固定。通过这种方式,在连杆臂120或130旋转时,各个凸轮218或220与完全包含于真空气密连杆臂外壳126内的四杆连杆机构(由如图8所示的元件120、222、224、226和232限定的;该四杆连杆机构在每个臂中是相同的)配合。该四杆连杆机构产生相对于远的或第二连杆臂轴230的近的或第一转换臂端的旋转运动。
通过用可编程电机围绕其初级枢轴驱动连杆臂和用凸轮围绕其相反端(肘管)驱动转换臂,位于转换臂的远的或第二端上的工件的运动从冷板到处理室可以基本上符合直线。当然,通过改变电机程序、凸轮外形或调节作为四杆连杆机构的一部分所包含的驱动器连杆的长度,可以改变相对于冷板中心轴或处理室中心轴的晶片运动路径和最后晶片位置。
在初级枢轴140处,上自动臂120可旋转地安装在中心(第一)轴250和围绕第一轴设置的可旋转的第二轴套252上。中心轴250通过传送带和滑轮系统固定到外壳组件上。上自动臂支架262和旋转密封件264牢固地将臂120固定于轴250、252。凸轮220牢固地固定到第一轴250以防止凸轮的旋转。利用相同的方式,下自动臂130可旋转地安装到第三和第四轴套254、256上,如图所示。第三轴套254通过传送带和滑轮系统固定,以至于它不可旋转,而轴套256是可旋转的。凸轮218牢固地固定于第三轴套254以防止凸轮旋转。轴承258设置在这些轴之间,以便连接旋转元件。第二轴套252借助于由第二电机212驱动的定时带和滑轮装置(未示出)相对于第一轴250旋转。同样,轴套256借助于由第三电机214驱动的定时带和滑轮装置(未示出)相对于外壳旋转。上和下凸轮组件在图11中表示为266、268。应该指出,由于自动臂120、130是内部中空的,因此通过轴250排气可以保持真空,因为凸轮220优选具有在其中的开口。上连杆臂和下连杆臂包括弹簧固定器260,用于连接摇臂226与复位弹簧264。
图12表示两个夹子270和272,它们分别用于调节凸轮220和276(该图中未示出凸轮)的位置并分别位于每个连杆臂250、260中。采用滑轮和传送带系统调节凸轮的位置。传送带(未示出)安装在夹子270、272的周围并与轴252和256配合,以便调节凸轮220、270的位置。第二电机212与夹子270配合以实现上连杆臂120的旋转,而第三电机214与夹子272配合以实现下连杆臂130的旋转。
在与空气内自动装置(图中未示出)交换晶片期间,上端效应器124和下端效应器134可以是同轴的。此外,两个晶片可以在与处理室104的晶片交换操作中途同时占据负载锁定室102。上自动臂120和下自动臂130可以以允许第一晶片从处理室104取出的方式接合,以便在放在冷板130上之前在将放在处理室104中的第二晶片下面通过。上自动臂120和下自动臂130可共享公共初级枢轴140,以至于第一电机210(z轴电机)在z方向沿着初级枢轴140同时驱动臂组件120和130。
上连杆臂或下连杆臂120或130围绕初级枢轴140的旋转引起相应转换臂122、132和固定的端效应器124、134相对于子室116旋转。因此上或下转换臂122、132相对于子室116的转移是通过凸轮220、218来实现的。例如,凸轮220的位置固定在不回转的轴250上并与初级枢轴140同轴,其中第二轴252(见图11)和上连杆臂120围绕初级枢轴140可旋转。在上连杆臂120围绕初级枢轴140旋转时,凸轮跟随臂222跟随凸轮220的外形。这种运动引起上自动臂驱动连杆224(或下连杆臂130的相应元件)的往复运动,其中上自动臂驱动连杆224在凸轮跟随臂222的端部固定到凸轮连接钉上。这种往复驱动器连杆运动通过与上自动臂摇臂226的销接被转换成旋转运动,由此在上连杆臂120由DC伺服电机212旋转130度时,允许转换臂122旋转大约57度。该运动对于下部自动臂组件的相应元件是相同的。
上、下连杆臂120、130被电机和定时传送带装置围绕初级枢轴140驱动时,凸轮跟随器222的角度位置相对于连杆臂外壳改变。上、下自动臂摇链226和固定长度驱动连杆224之间的销接改变了摇臂226相对于连杆臂外壳的角度位置。相对摇臂端部同轴地固定到第一转换臂122的端部,或以使得转换臂122围绕上自动臂120的肘管旋转的方式转动第一转换臂122的端部。
如前所述,转换臂122、132的远端包括端效应器124、134如集成晶片控制盘等。端效应器124或134构成为将晶片提升或放在晶片支撑钉190、192和处理室104内的温度测量装置如热电偶193(见图6)的垫上,并将晶片194放在位于负载锁定室102内的冷板142上。当从处理室取出晶片或将晶片放在处理室中时,端效应器124可以在由晶片支撑钉190、192所述的圆圈内运动。相反,当将晶片194放在冷板142上时,端效应器124或134利用上或下连杆臂组件120、130在z轴方向上下移动。在将晶片194放在冷板142的表面上时,端效应器134的圆形形状允许它向下和围绕冷板142的周边运动。
在优选实施例中,冷板142的直径比要处理的晶片194的直径小,因此简化了由端效应器124、134进行的晶片放置。这种尺寸差仍然将导致均匀晶片温度控制,因为是在负载锁定室118的加压和抽真空期间使用的处理。例如,下自动臂130的端效应器134由上述机构从处理室104的中心线向负载锁定室118的中心移动,正好越过冷却站即冷板142。然后在刚刚取回之后由下自动臂130将晶片194放在冷却站或冷板142上。在允许自动操作组件在负z方向向下运动以便将晶片放在液体冷却盘或冷板组件的表面上时,支撑晶片的端效应器134的圆形形状限定液体冷却盘142的周边。在负载锁定室118从真空条件、通常为0.1-1.0托变为大气压力时,这允许晶片被缓慢冷却。要求负载锁定室118的通气以实现冷却板表面和晶片背面之间的气体导热传递系数在0.1-10.0托的变化,并且从10托到大气压力变化以便允许气体对流来冷却晶片。热传递系数的改变或增加或者排气到大气的理想的或实际所需的时间防止晶片中的机械应力和导致的变形及可能的损伤。随着负载锁定室118被排气到大气压力,上述冷却方法与硅晶片的高导热性组合,在晶片从处理温度被冷却时,提供在晶片表面上的均匀温度分布。这种方法特别适用于铜处理,其中在晶片194暴露于含有氧的大气之前,必须降低晶片的温度。
在上面的说明中,接合晶片传送臂的枢轴不是位于负载锁定室118的中心。此外,晶片传送路径不会使中心晶片轴穿过晶片传送臂初级枢轴140或大约在其附近。这种设置允许整个传送机构更紧凑,由此减小室118的尺寸。这种设置还允许晶片传送臂安装在子离子室中用于简化安装和维修。
本领域技术人员应该理解,上述晶片传送机构的结构与现有技术系统相比具有相对小的轨迹。在优选实施例的结构中,晶片194的线性运动可通过相当简单的紧凑机构来实现。大多数晶片传送机构可装配到比负载锁定室118的尺寸小的子室116中。
还应该理解,提供可拆卸子室116大大简化了维修。这对半导体制造设备特别重要,在半导体制造设备中对位于净化室内的机构的访问是受限制的,而且通常希望避免人员进入净化室。很多净化室提供访问面板,以便净化室外部的人员可容易地访问净化室内的设备而实际上不用进入净化室。这样,本发明允许容易地取出自动臂机构用于维护和修理。
本领域技术人员还应该理解,本发明的晶片传送机构可以是“右手的”或“左手的”。换言之,如果图1和2表示“右手”实施例,子室116位于“右”侧,应该理解相同的结构在“左手”负载锁定室中将同样工作得很好。优选地,如从图中看出的,对于右手和左手机构来说大多数部件具有相同的表示。因此,为了达到净化室几何形状和其内的设备需要“左手”或“右手”负载锁定室118和子室116的程度,前面所示的实施例很容易适用于这两种类型,只有少量元件必须具有“左”和/或“右”定向。这在制造晶片传送机构时提供了相当大的优势。
还应该理解,晶片传送机构使晶片194在负载锁定室118和处理室104之间线性移动的能力允许大大减小负载锁定室118的尺寸。换言之,如从图中可容易地看出,通过晶片194在负载锁定室内的冷板142和处理室104内的其最终位置之间的线性运动,负载锁定室118的Y方向(即横向于晶片194的运动)的内部直径仅须稍微大于晶片194本身的尺寸(当然,不包括子室116的尺寸)。另一方面,利用实现了基本上曲线而不是线性运动以便从冷板142向处理室104传送晶片194的晶片传送机构,负载锁定室118的尺寸必须稍微较大。使负载锁定室组件102的轨迹最小化的能力对半导体制造提供了相当大的优势,因为较小的轨迹允许更有效地利用昂贵的净化室空间。当然,应该理解,本文中的“线性”不是指完全线性,而是指基本直线的运动。尽管晶片194在负载锁定室118和处理室104之间的线性运动是优选的,但是曲线运动也是可以的。应该清楚,现有技术中使用负载锁定室、传送室和冷板相对于单或双晶片处理室占据了相当大的实际空间。在成组工具的情况下,传送室通常足够大以便固定多个处理室、单或双晶片。位于传送室中的自动机构通常需要复杂运动,这可能要求机械是复杂和高成本的。为此,通常的含有一个以上处理室的“成组”工具具有一个传送室以使晶片在负载锁定室和处理室之间穿梭运动。
这里所述的设备和工艺通过利用自动装置将前述操作组合到一个室中而减小了尺寸、内部容积、复杂性和成本,其中自动装置只包括简单的直线端效应器运动。由于提高了可用性,减小了尺寸和降低了每单位的成本,该工具中的每个处理室可设有单独的负载锁定室组件,该负载锁定室组件组合了现有技术负载锁定室、传送室和冷却室的前述功能。除了前述优点之外,每个负载锁定/处理室组件可单独执行功能。如果一个或多个负载锁定/处理室组件要求服务,这种模块化允许处理工具连续运行,通常这不是具有成组工具设备的情况,因为所有处理室都互连到单晶片传送室,并且如果失败,整个工具都不能工作。
本领域普通技术人员应该理解,上述晶片传送机构相对简单和容易制造。例如,总共只需要三个电机。这些电机包括(z轴)第一电机212、用于旋转上连杆臂120的第二电机212和用于旋转下连杆臂130的第三电机214。这与更复杂的现有技术系统相对比,该现有技术系统需要传送带和滑轮的复杂系统,或者每个臂需要两个电机(加上Z轴电机),目的是为了实现连杆臂围绕初级枢轴的旋转和转换臂围绕次级枢轴的旋转。这样,该设备相对于很多常规系统提供了相当大的简化性,因为从整个机构去掉了两个电机。
或者,还可以在这个系统中只使用两个电机代替三个电机。例如,z轴电机和旋转上自动臂120和下自动臂130的单电机。可使用离合器将该单电机交替连接到上自动臂120或下自动臂130,因为在通常的晶片传送顺序中它们不同时工作。任何数量的方法都可用于实现这一点。一种方法包括使用两个同轴的轴,通过键接离合器套筒在键接轴外部上下滑动,将其连接到连接到上自动臂120的轴或连接到下自动臂130的轴。根据被公开内容,其它方法对于本领域技术人员来说都是显而易见的。
本领域技术人员还应该理解,尽管在大多数图中电机212、214和216设置在负载锁定室组件102下面,但是该设备不限制电机的任何特殊位置。例如,z轴电机212可设置在负载锁定室组件102的上方,而不是其下面。同样,用于旋转连杆臂120、130的电机214和216还可设置在该负载锁定室组件102的上方,或者在其一侧。但是,从避免可能污染负载锁定室组件102的颗粒的方面考虑,相信在臂组件下面设置所有电机是优选的。
此外,通过利用用于每个臂的双凸轮设置,可以改变端效应器的路径。通过在上述机构中使用“拆分式”凸轮外形,在器件被组装和安装之后可以“调节”凸轮外形,以便在由负载锁定室中心线到处理室中心线所述的界限或路径内可以获得有效的任何谐振运动即直线以外的其它运动。这允许在不使用第二伺服电机或电机控制器及其相关软件的情况下实现转换臂相对于连杆臂的可独立选择或调节的运动。在本例中,外壳组件将含有如下三个同心轴:
a、旋转的最内部或第一轴,如前所述,上自动臂借助真空密封顶盖机械固定到该轴上。上自动臂和最内部或第一轴借助由第一DC伺服电机驱动的定时传送带和滑轮装置相对于外壳和中心轴旋转。
b、包围最内部或第一轴并与其同心的第二轴组件,该第二轴固定到外壳上并且相对于外壳是不旋转的。第二或中心轴组件包括机械固定到该轴的两个不回转的凸轮组件,该凸轮组件垂直设置在该轴上,以便这个凸轮外形平行于该轴的长轴线。下凸轮组件驱动下部自动连接连杆,而上凸轮组件驱动上部自动连接连杆,如上所述。每个凸轮组件包括可独立调节的两个凸轮,用于确定晶片端效应器的缩回位置和晶片端效应器的延伸位置;和
c、最外部或第三轴(最外套筒),它借助于定时传送带和滑轮装置相对于外壳和中心或第二轴旋转,其中定时传送带和滑轮装置是由第二DC伺服电机驱动的。
优选地,下连杆臂具有安装到最外部或第三轴端部的第一端。上连杆臂具有安装到最内部或第一轴(套筒)端部的第一端。该轴借助曲柄臂凸缘连接到上连杆臂。
凸轮和四杆连杆结构相对于如前所述的连杆臂驱动(旋转)转换臂,除了下面的情况之外:由两个可独立调节的凸轮构成的凸轮组件。每个凸轮组件中的第一或缩回凸轮安装或固定在不回转的第二或中心轴上。第二凸轮或延伸凸轮固定到每一凸轮组件中的第一凸轮上。第二凸轮借助于枢轴点可以相对于第一凸轮移动或调节,其中枢轴点是两个凸轮公用的,以至于凸轮外形保持对准的公共平面和相切的公共点。第二凸轮借助偏心装置可以围绕调节的枢轴点或公共点旋转,由此可使用偏心装置调节转换臂的延伸位置。连杆臂的缩回位置可通过松开传送带驱动锁定装置来调节。凸轮跟随器轴承在曲柄臂缩回部分运动期间与每个凸轮组件中的第一或下凸轮接触,并且在曲柄臂的延伸部分运动期间与每个凸轮组件中的第二或上凸轮接触。跟随器跨接点限定相切点。
在自动装置工作期间,有四个Z运动(上下运动)位置:(1)高;(2)中高,在“空气中”晶片交换中使用的;(3)中低,和(4)低。为了容易理解整个操作,图13-28中只示出了部分参考标记。如图13所示,臂组件在位置2开始等待来自空气中自动装置(未示出)的晶片,该空气中自动装置位于负载锁定室118外部的晶片操纵单元中。如图14所示,上自动臂组件(120、122和124)从空气中自动装置接收第一晶片290a。如图15所示,第一晶片290a下降到位置3。如图16所示,上自动臂组件(120、122、124)延伸到处理室104中,第一晶片290a在晶片钉190、192和晶片温度测量装置193之上。如图17所示,臂组件下降到位置4,将第一晶片290a下降到晶片钉190、192和热电偶193上(上自动臂端效应器124现在位于晶片支撑钉190、192和热电偶193下面)。如图18所示,上自动臂组件120、122和124返回到负载锁定室102。此时,槽阀(slit valve)150封闭,允许晶片290a开始在处理室104中的选择处理。同时,负载锁定室组件104以氮气等被排气到大气压力。如图19所示,臂组件上升到位置2以接收来自空气中自动装置的上自动臂组件120、122、124上的第二晶片290b。现在参照图20,将晶片放在上盘上之后,使用真空泵装置108、110使负载锁定室返回到0.1-1.0托的晶片传送压力。在处理室104中结束晶片处理之后,负载锁定室组件102返回到传送压力,并且槽阀150打开(见图4)。下自动臂组件130、132、134延伸到处理室104中(并且现在处于晶片钉190、192和热电偶193下面)。如图21所示,臂组件上升到位置1以从晶片钉190、192和热电偶193拾取第一晶片290a(下自动臂端效应器134现在处于晶片钉190、192和热电偶193之上)。如图22所示,下自动臂组件130、132和134返回到具有第一晶片290a的负载锁定室102。如图23所示,臂组件下降到位置3,将第一晶片290a放在冷板142上并准备将上自动臂端效应器124延伸到具有第二晶片290b的处理室104中。如图24所示,上自动臂组件120、122、124延伸到具有第二晶片290b的处理室104中(第二晶片290b处于晶片钉190、192和热电偶193之上)。如图25所示,上自动臂组件120、122、124下降到位置4,将第二晶片290b下降到晶片钉190、192和热电偶193上(上自动臂端效应器124现在处于晶片钉190、192和热电偶193下面)。如图26所示,上自动臂组件120、122、124返回到负载锁定室组件102。此时,槽阀150关闭,隔离用于晶片处理的处理室,而负载锁定室被排气到大气压以允许冷板142上的晶片290a的受控冷却。在图27中,臂组件上升到位置2,用下自动臂组件130、132、134拾取第一晶片290a。在图28中,空气中自动装置从下自动臂组件提取第一晶片290a。然后该臂组件机构返回,上自动臂组件120、122、124从空气中自动装置(如前面图20中所示)接收第三晶片290c(未示出)。
重要的是应该指出,在优选实施例中,连杆臂组件是真空密封的,以便在连杆臂的内部腔和周围的负载锁定室之间可以连续保持压差。更优选,连杆臂组件内的压力连续保持在负载锁定室内的压力下。不同于真空系统的真空装置(未示出)可以用于给负载锁定室抽真空。优选地,连杆臂内腔连接到真空装置的前级管道部分,该真空装置连接到相邻处理室和用于保持相邻处理室中的真空。这样,前级管道部分内的压力优选低于负载锁定室的最小工作压力。
保持压差可防止在处理室内的臂运动期间由真空密封件的旋转运动产生的颗粒的流动或射出。在自动臂旋转密封件上的压差确保由密封件表面的摩擦产生的任何移动颗粒由于气体流而移动,或者由于压差的功能,移动到曲柄臂的内腔。
前面已经参照本发明的特殊实施例详细介绍了本发明,本领域技术人员应该理解在不脱离本发明的精神和范围的情况下可以对本发明做各种变化和修改。因此,本发明趋于覆盖落入所附权利要求书及其等效形式的范围内的本发明的各种修改和改变。
Claims (59)
1.一种负载锁定室组件,包括:
负载锁定室;和
与负载锁定室连通的子室,其中子室包括具有在子室中的初级枢轴的第一自动臂,其中第一自动臂可以将衬底从大致负载锁定室中心的位置移动到负载锁定室外部的位置。
2.根据权利要求1的负载锁定室组件,其中第一自动臂包括用于保持衬底的第一端效应器。
3.根据权利要求1的负载锁定室组件,其中第一自动臂安装到可旋转轴套上,并包括:
包括细长外壳的第一连杆臂,该外壳具有第一端和第二端,其中第一连杆臂包括设置在外壳内的第一凸轮和连接到第一凸轮的第一四杆连杆机构,其中第一凸轮牢固地连接到同心地安装在第一轴套内的轴上,该轴限定自动臂的初级枢轴;和
第一转换臂,它可旋转地连接到第一连杆臂的第二端并具有固定到该转换臂端部的第一端效应器,其中第一连杆臂围绕该轴的旋转使第一四杆连杆机构与第一凸轮配合,并围绕次级枢轴可旋转地移动第一转换臂。
4.根据权利要求3的负载锁定室组件,其中第一连杆臂和第一转换臂完全装配在于室中。
5.根据权利要求3的负载锁定室组件,其中第一四杆连杆机构包括连接到第一连杆臂主体和第一驱动器连杆并被第一凸轮驱动的第一凸轮跟随器连杆,连接到第一凸轮跟随器连杆的第一驱动器连杆,连接到第一驱动器连杆和第一连杆臂外壳的第一摇臂连杆。
6.根据权利要求5的负载锁定室组件,其中第一摇臂连杆包括弹簧,其中该弹簧在第一凸轮跟随器连杆和第一凸轮之间保持压缩和接触。
7.根据权利要求1的负载锁定室组件,还包括用于沿着垂直平面平移第一自动臂的第一电机。
8.根据权利要求1的负载锁定室组件,还包括用于围绕初级枢轴旋转第一自动臂的第二电机。
9.根据权利要求1的负载锁定室组件,还包括大致设置在负载锁定室中心的冷板。
10.根据权利要求9的负载锁定室组件,其中冷板是温控的。
11.根据权利要求1的负载锁定室组件,还包括可围绕初级枢轴旋转的第二自动臂。
12.根据权利要求11的负载锁定室组件,还包括用于围绕初级枢轴移动第二自动臂的第三电机。
13.根据权利要求11的负载锁定室组件,其中第一和第二自动臂可以彼此独立地旋转。
14.根据权利要求11的负载锁定室组件,其中第一和第二自动臂连续从处理室取出第一衬底并将第二衬底放进处理室中。
15.根据权利要求11的负载锁定室组件,其中第二自动臂包括:
包括细长外壳的第二连杆臂,所述外壳具有第一端和第二端,其中第二连杆臂包括设置在外壳内的第二凸轮和连接到第二凸轮的第二四杆连接机构,其中第二凸轮牢固地连接到第二轴套上,该第二轴套同轴地安装在第三轴套内,其中第三轴套的旋转限定了第二自动臂的初级枢轴;和
可旋转地连接到第一连杆臂的第二端并具有固定到转换臂端部的第二端效应器的第二转换臂,其中第二连杆臂围绕第三轴套的旋转使第二四杆连杆机构与第二凸轮配合,并使第二转换臂围绕第三枢轴可旋转地移动。
16.根据权利要求15的负载锁定室组件,其中第一和第二连杆臂以及第一和第二转换臂完全装配在子室中。
17.根据权利要求11的负载锁定室组件,还包括用于使第一和第二臂沿着初级枢轴垂直地移动的第一电机、用于使第一自动臂围绕初级枢轴旋转的第二电机以及用于使第二自动臂围绕初级枢轴旋转的第三电机。
18.一种自动臂组件,包括:
第一连杆臂,包括具有第一端和第二端的细长外壳、在第一端设置在外壳内的不回转的第一凸轮和可配合地连接到第一凸轮的第一四杆连杆机构,其中第一凸轮牢固地连接到同轴地安装在第一旋转轴套内的不回转的轴上,第一连杆臂连接到该第一轴套上并与该第一轴套可围绕限定初级枢轴的轴旋转;
第一转换臂,其可旋转地连接到第一连杆臂的第二端并由四杆连杆机构可旋转地配合;和
连接到该转换臂的第一端效应器,其中第一连杆臂和轴套围绕该轴的旋转使第一凸轮与第一四杆连杆机构机械地配合,并且使该转换臂围绕次级枢轴可旋转地移动。
19.根据权利要求18的自动臂组件,其中第一四杆连杆机构包括:
连杆臂外壳;
第一凸轮跟随器连杆组件,其包括可旋转地连接到细长外壳的部分,其中该连杆组件包括与第一凸轮接触的轴承;
第一驱动器连杆,其在一端可旋转地连接到第一凸轮跟随器连杆并在另一端可旋转地连接到第一摇臂;和
第一摇臂。
20.根据权利要求18的自动臂组件,其中第一凸轮、第一凸轮跟随器连杆、第一驱动器连杆和第一摇臂连杆设置在第一连杆臂的外壳内。
21.根据权利要求21的自动臂组件,其中第一摇臂连杆包括摇臂和弹簧,其中该弹簧连接到第一连杆臂的外壳和摇臂上,并且该摇臂可调节地连接到驱动器连杆上。
22.根据权利要求21的自动臂组件,其中所述弹簧适于给该驱动器连杆提供拉力负载,用于保持第一凸轮跟随器连杆和第一凸轮之间的恒定接触。
23.根据权利要求21的自动臂组件,其中所述弹簧适用于被伸长,以便允许第一凸轮跟随器连杆组件被旋转脱离与第一凸轮的机械接触。
24.根据权利要求18的自动臂组件,还包括用于在垂直方向移动第一连杆臂的第一电机。
25.根据权利要求18的自动臂组件,其中自动臂组件可基本上使衬底从大致负载锁定室中心的位置线性移动到负载锁定室外部的位置。
26.根据权利要求18的自动臂组件,还包括:
第二连杆臂,包括具有第一端和第二端的细长外壳、在第一端设置在外壳内的不回转的第二凸轮和由第二凸轮驱动的第二四杆连杆机构,其中第二凸轮牢固地连接到同轴地围绕可旋转的第一轴套和轴安装的不回转的第二轴套上,其中该第二连杆臂连接到围绕该第二轴套设置的可旋转的第三轴套;
第二转换臂,可旋转地连接到第二连杆臂的第二端并可旋转地与第二四杆连杆机构配合;和
连接到第二转换臂的第二端效应器,其中第二连杆臂围绕(第二)轴的旋转使第二凸轮与第二四杆连杆机构配合,并使第二转换臂可旋转地围绕次级枢轴移动。
27.根据权利要求26的自动臂组件,其中第一和第二连杆臂可围绕初级枢轴独立地旋转。
28.根据权利要求26的自动臂组件,其中第二四杆连杆机构包括:
第二连杆臂外壳;
第二凸轮跟随器连杆组件,其包括可旋转地连接到所述外壳上的部分,其中该第二连杆组件包括与第二凸轮接触的轴承;
第二驱动器连杆,其在一端可旋转地连接到第二凸轮跟随器连杆并在另一端可旋转地连接到第二摇臂;和
第二摇臂。
29.根据权利要求26的自动臂组件,其中第二凸轮、第二凸轮跟随器组件、第二驱动器连杆和第二摇臂连杆设置在第二连杆臂的外壳内。
30.根据权利要求26的自动臂组件,还包括适于在垂直方向平移第一连杆臂和第二连杆臂的第一电机。
31.根据权利要求26的自动臂组件,其中第二电机可旋转地配合到第一轴套,以便接合用于传送第一晶片的第一端效应器,其中第三电机可旋转地配合到第三轴套,以便接合用于连续传送第二晶片的第二端效应器。
32.一种晶片传送设备,用于在具有不同压力的两个区域之间传送衬底,而基本上不会影响每个区域的压力,该晶片传送设备包括:
包括用于支撑待处理晶片的装置的气密处理室;和
连接到所述处理室的负载锁定室组件,其中该负载锁定室组件包括负载锁定室和连接到该负载锁定室的子室,其中该子室包括具有在该子室内的初级枢轴的第一自动臂和第二自动臂。
33.根据权利要求32的晶片传送设备,其中第一自动臂包括用于保持衬底的第一端效应器。
34.根据权利要求32的晶片传送设备,其中第二自动臂包括用于保持衬底的第二端效应器。
35.根据权利要求32的晶片传送设备,其中第一自动臂包括第一连杆臂、第一转换臂和第一端效应器,并且第二自动臂包括第二连杆臂、第二转换臂和第二端效应器。
36.根据权利要求32的晶片传送设备,还包括用于沿着垂向或z轴平移第一和第二自动臂的第一电机、用于围绕z轴独立地旋转第一自动臂的第二电机、和用于围绕z轴独立地旋转第二自动臂的第三电机。
37.根据权利要求35的晶片传送设备,其中子室可拆卸地固定到负载锁定室上,并且第一和第二自动连杆臂以及第一和第二转换臂完全处于子室内。
38.根据权利要求32的晶片传送设备,其中第一连杆臂包括具有第一端和第二端的细长外壳、在第一端设置在外壳内的不回转的第一凸轮以及由第一电机驱动的第一四杆连杆机构,其中第一凸轮牢固地连接到同轴地安装在第一轴套内的不回转的轴,其中第一连杆臂连接到第一轴套并且可相对于轴套围绕限定z轴的轴旋转。
39.根据权利要求32的晶片传送设备,其中第二连杆臂包括具有第一端和第二端的细长外壳,在第一端设置在外壳内的不回转的第二凸轮以及由第二凸轮驱动的第二四杆连杆机构,其中第二凸轮牢固地连接到围绕第一轴套同轴安装的不回转的第二轴上,其中第二连杆臂连接到旋转的第三轴套并且可围绕限定z轴的第三轴套旋转。
40.根据权利要求32的晶片传送设备,还包括大致处于负载锁定室的中心的冷板。
41.根据权利要求40的晶片传送设备,其中冷板是温控的。
42.根据权利要求32的晶片传送设备,其中第一和第二自动臂可彼此独立地旋转。
43.根据权利要求32的晶片传送设备,其中第一自动臂将第一晶片从处理室传送到负载锁定室内的表面上,并且第二自动臂连续地将第二晶片传送到处理室中。
44.根据权利要求32的晶片传送设备,还包括用于使第一自动臂转动的第一电机和用于使第二自动臂转动的第二电机。
45.根据权利要求38的晶片传送设备,其中第一四杆连杆机构包括连接到第一细长外壳并被第一凸轮驱动的第一凸轮跟随器连杆、连接到第一凸轮跟随器连杆的第一驱动器连杆、和连接到第一驱动器连杆和第一连杆臂的细长外壳的第一摇臂连杆。
46.根据权利要求45的晶片传送设备,其中第一摇臂连杆包括连接到第一驱动器连杆的摇臂和弹簧,其中该弹簧还连接到第一连杆臂的细长外壳,以便允许该四杆连杆机构保持与该凸轮的恒定接触。
47.根据权利要求32的晶片传送设备,还包括设置在负载锁定室组件和处理室之间的可关闭的端口,其中可关闭端口在关闭位置形成真空气密密封,并且该端口适于接收在负载锁定室和处理室之间传送的晶片。
48.一种用于在具有不同压力的两个区域之间传送衬底而基本上不影响任何区域的压力的方法,该方法包括:
将第一和第二自动臂安装在连接到负载锁定室的可拆卸子室内,其中该第一和第二自动臂包括在子室内的初级枢轴;
将负载锁定室内的压力减小到处理室内的工作压力,其中可关闭端口设置在处理室和负载锁定室之间;
围绕初级枢轴旋转第一自动臂,用于使第一自动臂和固定的第一端效应器延伸到处理室内,以便收回第一衬底;
在垂向或z轴方向移动第一自动臂,以便从处理室内的晶片支撑钉提升第一衬底;
围绕初级枢轴旋转第一自动臂,以便从处理室缩回第一自动臂和固定的端效应器,并且将该端效应器移动到带有第一衬底的负载锁定室的中心;
通过围绕晶片支架的周边移动第一端效应器,在垂向或z轴方向移动第一自动臂,以将第一衬底放在位于负载锁定室中心的支架上;
围绕初级枢轴旋转第二自动臂,用于将第二自动臂和其上具有第二衬底的固定的第二端效应器延伸到处理室内,其中第二衬底被放在处于大气压力的第二端效应器上;
在垂向或z轴方向(向下)移动第一自动臂,以便将第二衬底放在处理室内部的晶片支撑钉上,同时降低固定到第一自动臂上的第一端效应器,并进一步围绕冷板的周边下降,而不干扰第一晶片;
围绕初级枢轴旋转第二自动臂,以便将第二自动臂和固定的第二端效应器从处理室缩回到负载锁定室中心,其中处理室的工作压力保持不变;
从处理室缩回第一自动臂和第二自动臂并关闭处理室和负载锁定室之间的端口;和
将负载锁定室内的压力调节到环境大气压力,同时保持处理室内的工作压力。
49.根据权利要求48的方法,其中第一和第二衬底在处理室和负载锁定室之间的移动路径基本上是线性的。
50.根据权利要求48的方法,其中缩回第一衬底的步骤还包括将第一衬底放在负载锁定室内的温控表面上。
51.根据权利要求48的方法,其中围绕初级枢轴旋转第一自动臂包括将凸轮跟随器连杆与一不回转的凸轮配合,其中该凸轮跟随器连杆由摇臂驱动,所述摇臂用于围绕次级枢轴旋转连接到第一自动臂的第一转换臂。
52.根据权利要求51的方法,其中在所述臂旋转期间借助连接到摇臂的弹簧和自动臂的外壳上的弹簧使凸轮跟随器连杆保持与所述凸轮接触。
53.根据权利要求52的方法,其中使弹簧伸长,以便允许第一凸轮跟随器连杆被旋转离开与凸轮的机械接触。
54.根据权利要求48的方法,其中第一转换臂包括第一端效应器。
55.根据权利要求48的方法,其中该自动臂还包括连杆臂,该连杆臂围绕初级枢轴大约旋转130度。
56.根据权利要求48的方法,其中在自动臂围绕初级枢轴旋转130度时,该转换臂旋转大约57度。
57.一种衬底传送机构,包括:
第一连杆臂;
可围绕公共枢轴相对于第一连杆臂旋转的第二连杆臂;
用于沿着z轴移动第一和第二连杆臂的z轴电机;和
交替连接到第一和第二连杆臂的单个电机,用于围绕公共枢轴交替地旋转第一连杆臂和第二连杆臂。
58.根据权利要求57的衬底传送机构,还包括:
用于安装第一连杆臂的第一轴;
用于安装第二连杆臂的第二轴;和
用于将单个电机交替连接到第一和第二轴的离合器。
59.一种用于在具有不同压力的两个区域之间传送衬底而基本上不影响任何区域的压力的方法,该方法包括:
将第一和第二自动臂安装在连接到负载锁定室的可拆卸子室内,其中该第一和第二自动臂包括在子室内的初级枢轴;
在处于预定工作压力的处理室内处理第一晶片,其中处理室连接到负载锁定室并包括可关闭端口;
利用第一自动臂从处理室取出有源晶片并在处理室的工作压力下利用第二自动臂将第二晶片放在处理室内;
关闭所述端口并在处于工作压力的处理室内处理第二晶片,同时对负载锁定室排气并从负载锁定室外部接收第三晶片,将处理过的第一晶片移出到负载锁定室外部;
将负载锁定室内的压力减小到工作压力;和
打开所述端口并利用第一自动臂从处理室取出第二晶片,并利用第二臂将第三晶片放在处理室内。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/905,031 | 2001-07-13 | ||
| US09/905,031 US6663333B2 (en) | 2001-07-13 | 2001-07-13 | Wafer transport apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1554112A true CN1554112A (zh) | 2004-12-08 |
| CN1320595C CN1320595C (zh) | 2007-06-06 |
Family
ID=25420193
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB028176804A Expired - Fee Related CN1320595C (zh) | 2001-07-13 | 2002-07-12 | 负载锁定室组件和晶片传送设备 |
Country Status (8)
| Country | Link |
|---|---|
| US (3) | US6663333B2 (zh) |
| EP (1) | EP1407479A2 (zh) |
| JP (1) | JP4352233B2 (zh) |
| KR (1) | KR100940958B1 (zh) |
| CN (1) | CN1320595C (zh) |
| AU (1) | AU2002354691A1 (zh) |
| TW (1) | TW559863B (zh) |
| WO (1) | WO2003007340A2 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107111251A (zh) * | 2014-11-14 | 2017-08-29 | 迈普尔平版印刷Ip有限公司 | 用于在光刻系统中转移基材的加载锁定系统和方法 |
Families Citing this family (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6582175B2 (en) * | 2000-04-14 | 2003-06-24 | Applied Materials, Inc. | Robot for handling semiconductor wafers |
| US6918731B2 (en) * | 2001-07-02 | 2005-07-19 | Brooks Automation, Incorporated | Fast swap dual substrate transport for load lock |
| JP2003031639A (ja) * | 2001-07-17 | 2003-01-31 | Canon Inc | 基板処理装置、基板の搬送方法及び露光装置 |
| JP2003045947A (ja) * | 2001-07-27 | 2003-02-14 | Canon Inc | 基板処理装置及び露光装置 |
| US20040221811A1 (en) * | 2001-11-30 | 2004-11-11 | Robert Mitchell | Method and apparatus for processing wafers |
| TWI294155B (en) | 2002-06-21 | 2008-03-01 | Applied Materials Inc | Transfer chamber for vacuum processing system |
| US20040101385A1 (en) * | 2002-11-25 | 2004-05-27 | Ta-Kuang Chang | Semiconductor process apparatus and SMIF pod used therein |
| US20040235299A1 (en) * | 2003-05-22 | 2004-11-25 | Axcelis Technologies, Inc. | Plasma ashing apparatus and endpoint detection process |
| US7010388B2 (en) * | 2003-05-22 | 2006-03-07 | Axcelis Technologies, Inc. | Work-piece treatment system having load lock and buffer |
| US8580076B2 (en) * | 2003-05-22 | 2013-11-12 | Lam Research Corporation | Plasma apparatus, gas distribution assembly for a plasma apparatus and processes therewith |
| US7665946B2 (en) | 2003-11-04 | 2010-02-23 | Advanced Display Process Engineering Co., Ltd. | Transfer chamber for flat display device manufacturing apparatus |
| US10086511B2 (en) | 2003-11-10 | 2018-10-02 | Brooks Automation, Inc. | Semiconductor manufacturing systems |
| US7458763B2 (en) | 2003-11-10 | 2008-12-02 | Blueshift Technologies, Inc. | Mid-entry load lock for semiconductor handling system |
| US20070269297A1 (en) | 2003-11-10 | 2007-11-22 | Meulen Peter V D | Semiconductor wafer handling and transport |
| US7162881B2 (en) * | 2004-04-07 | 2007-01-16 | Nikon Corporation | Thermophoretic wand to protect front and back surfaces of an object |
| US7246985B2 (en) * | 2004-04-16 | 2007-07-24 | Axcelis Technologies, Inc. | Work-piece processing system |
| CN1778986B (zh) * | 2004-06-02 | 2015-08-19 | 应用材料公司 | 用于密封腔室的方法和装置 |
| US7784164B2 (en) * | 2004-06-02 | 2010-08-31 | Applied Materials, Inc. | Electronic device manufacturing chamber method |
| CN103199039B (zh) * | 2004-06-02 | 2016-01-13 | 应用材料公司 | 电子装置制造室及其形成方法 |
| US8648977B2 (en) | 2004-06-02 | 2014-02-11 | Applied Materials, Inc. | Methods and apparatus for providing a floating seal having an isolated sealing surface for chamber doors |
| US20060201074A1 (en) * | 2004-06-02 | 2006-09-14 | Shinichi Kurita | Electronic device manufacturing chamber and methods of forming the same |
| DE112005001989T5 (de) * | 2004-08-17 | 2007-08-02 | Mattson Technology Inc., Fremont | Kostengünstige Prozessierplattform mit hohem Durchsatz |
| US8668422B2 (en) * | 2004-08-17 | 2014-03-11 | Mattson Technology, Inc. | Low cost high throughput processing platform |
| US7585141B2 (en) * | 2005-02-01 | 2009-09-08 | Varian Semiconductor Equipment Associates, Inc. | Load lock system for ion beam processing |
| US20070077134A1 (en) * | 2005-09-30 | 2007-04-05 | Dickinson Colin J | Vacuum handler systems and processes for flexible automation of semiconductor fabrication |
| CN100342517C (zh) * | 2005-10-19 | 2007-10-10 | 哈尔滨工业大学 | 二维并联驱动的硅片搬运机器人 |
| FR2902235B1 (fr) * | 2006-06-09 | 2008-10-31 | Alcatel Sa | Dispositif de transport, de stockage et de transfert de substrats |
| US8701519B2 (en) * | 2006-06-28 | 2014-04-22 | Genmark Automation, Inc. | Robot with belt-drive system |
| US8220354B2 (en) * | 2006-06-28 | 2012-07-17 | Genmark Automation, Inc. | Belt-driven robot having extended Z-axis motion |
| US20080025821A1 (en) * | 2006-07-25 | 2008-01-31 | Applied Materials, Inc. | Octagon transfer chamber |
| US8057153B2 (en) * | 2006-09-05 | 2011-11-15 | Tokyo Electron Limited | Substrate transfer device, substrate processing apparatus and substrate transfer method |
| US20080242108A1 (en) * | 2007-04-02 | 2008-10-02 | Taiwan Semiconductor Manufacturing Co., Ltd. | Method for fabricating semiconductor device |
| US8459140B2 (en) * | 2007-04-18 | 2013-06-11 | Fabworx Solutions, Inc. | Adjustable wrist design for robotic arm |
| US10541157B2 (en) | 2007-05-18 | 2020-01-21 | Brooks Automation, Inc. | Load lock fast pump vent |
| WO2008144670A1 (en) * | 2007-05-18 | 2008-11-27 | Brooks Automation, Inc. | Load lock fast pump vent |
| US8500382B2 (en) * | 2007-05-22 | 2013-08-06 | Axcelis Technologies Inc. | Airflow management for particle abatement in semiconductor manufacturing equipment |
| US7794194B2 (en) | 2007-09-14 | 2010-09-14 | Seagate Technology Llc | Pick and place work piece flipper |
| US8430620B1 (en) | 2008-03-24 | 2013-04-30 | Novellus Systems, Inc. | Dedicated hot and cold end effectors for improved throughput |
| US9117870B2 (en) * | 2008-03-27 | 2015-08-25 | Lam Research Corporation | High throughput cleaner chamber |
| KR101396469B1 (ko) * | 2008-07-15 | 2014-05-23 | 가부시키가이샤 아루박 | 공작물 전달 시스템 및 방법 |
| US8383786B2 (en) * | 2009-02-11 | 2013-02-26 | Dow Agrosciences, Llc. | Pesticidal compositions |
| JP5037551B2 (ja) * | 2009-03-24 | 2012-09-26 | 東京エレクトロン株式会社 | 基板交換機構及び基板交換方法 |
| JP2011071293A (ja) * | 2009-09-25 | 2011-04-07 | Tokyo Electron Ltd | プロセスモジュール、基板処理装置、および基板搬送方法 |
| US20110136346A1 (en) * | 2009-12-04 | 2011-06-09 | Axcelis Technologies, Inc. | Substantially Non-Oxidizing Plasma Treatment Devices and Processes |
| US8562272B2 (en) * | 2010-02-16 | 2013-10-22 | Lam Research Corporation | Substrate load and unload mechanisms for high throughput |
| US8893642B2 (en) * | 2010-03-24 | 2014-11-25 | Lam Research Corporation | Airflow management for low particulate count in a process tool |
| US8282698B2 (en) | 2010-03-24 | 2012-10-09 | Lam Research Corporation | Reduction of particle contamination produced by moving mechanisms in a process tool |
| US20110248738A1 (en) * | 2010-04-12 | 2011-10-13 | Sze Chak Tong | Testing apparatus for electronic devices |
| JP5168329B2 (ja) * | 2010-08-31 | 2013-03-21 | Tdk株式会社 | ロードポート装置 |
| KR102392186B1 (ko) * | 2011-03-11 | 2022-04-28 | 브룩스 오토메이션 인코퍼레이티드 | 기판 처리 툴 |
| US9129778B2 (en) | 2011-03-18 | 2015-09-08 | Lam Research Corporation | Fluid distribution members and/or assemblies |
| JP5434990B2 (ja) * | 2011-08-31 | 2014-03-05 | 株式会社安川電機 | ロボットのアーム構造およびロボット |
| KR20230084597A (ko) * | 2011-09-16 | 2023-06-13 | 퍼시몬 테크놀로지스 코포레이션 | 운송 장치 및 이를 포함하는 처리 장치 |
| CN103084293A (zh) * | 2011-10-31 | 2013-05-08 | 鸿富锦精密工业(深圳)有限公司 | 机器人臂部件 |
| JP5609896B2 (ja) * | 2012-01-13 | 2014-10-22 | 株式会社安川電機 | 搬送システム |
| JP5663638B2 (ja) | 2012-10-11 | 2015-02-04 | 株式会社ティーイーエス | 基板移送装置 |
| US10224232B2 (en) | 2013-01-18 | 2019-03-05 | Persimmon Technologies Corporation | Robot having two arms with unequal link lengths |
| US9149936B2 (en) | 2013-01-18 | 2015-10-06 | Persimmon Technologies, Corp. | Robot having arm with unequal link lengths |
| DE102013101777A1 (de) * | 2013-02-22 | 2014-08-28 | Aixtron Se | Vorrichtung zum Be- und Entladen einer CVD-Anlage |
| US9245783B2 (en) | 2013-05-24 | 2016-01-26 | Novellus Systems, Inc. | Vacuum robot with linear translation carriage |
| WO2015112538A1 (en) | 2014-01-21 | 2015-07-30 | Persimmon Technologies, Corp. | Substrate transport vacuum platform |
| KR102567510B1 (ko) | 2015-03-12 | 2023-08-17 | 퍼시몬 테크놀로지스 코포레이션 | 종속화된 엔드 이펙터 움직임을 가진 로봇 |
| CN107618540B (zh) * | 2017-09-05 | 2019-11-12 | 安徽万礼食品有限责任公司 | 一种筒型金属制品表面化学加工用装置 |
| CN110556263A (zh) * | 2019-08-31 | 2019-12-10 | 武汉倍诺德开关有限公司 | 一种40.5kV充气柜传动机构 |
| CN113257718B (zh) * | 2021-06-08 | 2021-09-17 | 陛通半导体设备(苏州)有限公司 | 一种便于位置校准的堆叠结构腔体设备 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4483654A (en) | 1981-02-13 | 1984-11-20 | Lam Research Corporation | Workpiece transfer mechanism |
| US4433951A (en) * | 1981-02-13 | 1984-02-28 | Lam Research Corporation | Modular loadlock |
| US4584045A (en) | 1984-02-21 | 1986-04-22 | Plasma-Therm, Inc. | Apparatus for conveying a semiconductor wafer |
| US4749330A (en) * | 1986-05-14 | 1988-06-07 | Hine Derek L | Transport mechanism |
| US4728252A (en) | 1986-08-22 | 1988-03-01 | Lam Research Corporation | Wafer transport mechanism |
| JPS6464232A (en) * | 1987-09-03 | 1989-03-10 | Toshiba Corp | Conveyor |
| JPH0825151B2 (ja) * | 1988-09-16 | 1996-03-13 | 東京応化工業株式会社 | ハンドリングユニット |
| JP2808826B2 (ja) * | 1990-05-25 | 1998-10-08 | 松下電器産業株式会社 | 基板の移し換え装置 |
| US5223112A (en) * | 1991-04-30 | 1993-06-29 | Applied Materials, Inc. | Removable shutter apparatus for a semiconductor process chamber |
| JP3264076B2 (ja) * | 1994-01-31 | 2002-03-11 | 松下電器産業株式会社 | 真空処理装置 |
| US5730801A (en) * | 1994-08-23 | 1998-03-24 | Applied Materials, Inc. | Compartnetalized substrate processing chamber |
| US5997235A (en) * | 1996-09-20 | 1999-12-07 | Brooks Automation, Inc. | Swap out plate and assembly |
| US5902088A (en) | 1996-11-18 | 1999-05-11 | Applied Materials, Inc. | Single loadlock chamber with wafer cooling function |
| US5961269A (en) | 1996-11-18 | 1999-10-05 | Applied Materials, Inc. | Three chamber load lock apparatus |
| US6547510B1 (en) * | 1998-05-04 | 2003-04-15 | Brooks Automation Inc. | Substrate transport apparatus with coaxial drive shafts and dual independent scara arms |
| JPH11333778A (ja) * | 1998-05-29 | 1999-12-07 | Daihen Corp | 搬送用ロボット装置 |
| JP3863671B2 (ja) * | 1998-07-25 | 2006-12-27 | 株式会社ダイヘン | 搬送用ロボット装置 |
| US6464448B1 (en) * | 1998-09-01 | 2002-10-15 | Brooks Automation, Inc. | Substrate transport apparatus |
| JP3926501B2 (ja) * | 1998-11-13 | 2007-06-06 | ナブテスコ株式会社 | ロボットアーム及びその駆動装置 |
| JP2000150617A (ja) * | 1998-11-17 | 2000-05-30 | Tokyo Electron Ltd | 搬送装置 |
| US6610150B1 (en) * | 1999-04-02 | 2003-08-26 | Asml Us, Inc. | Semiconductor wafer processing system with vertically-stacked process chambers and single-axis dual-wafer transfer system |
| US6350097B1 (en) * | 1999-04-19 | 2002-02-26 | Applied Materials, Inc. | Method and apparatus for processing wafers |
| US6235656B1 (en) | 2000-07-03 | 2001-05-22 | Andrew Peter Clarke | Dual degas/cool loadlock cluster tool |
| US6499936B2 (en) * | 2001-02-17 | 2002-12-31 | Yokogawa Electric Corporation | Transfer system |
-
2001
- 2001-07-13 US US09/905,031 patent/US6663333B2/en not_active Expired - Lifetime
-
2002
- 2002-07-12 JP JP2003513012A patent/JP4352233B2/ja not_active Expired - Fee Related
- 2002-07-12 KR KR1020047000473A patent/KR100940958B1/ko not_active IP Right Cessation
- 2002-07-12 WO PCT/US2002/023233 patent/WO2003007340A2/en active Application Filing
- 2002-07-12 AU AU2002354691A patent/AU2002354691A1/en not_active Abandoned
- 2002-07-12 EP EP02752504A patent/EP1407479A2/en not_active Withdrawn
- 2002-07-12 CN CNB028176804A patent/CN1320595C/zh not_active Expired - Fee Related
- 2002-07-15 TW TW091115674A patent/TW559863B/zh not_active IP Right Cessation
-
2003
- 2003-09-16 US US10/663,519 patent/US6969227B2/en not_active Expired - Fee Related
- 2003-09-16 US US10/663,088 patent/US6877946B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107111251A (zh) * | 2014-11-14 | 2017-08-29 | 迈普尔平版印刷Ip有限公司 | 用于在光刻系统中转移基材的加载锁定系统和方法 |
| US10087019B2 (en) | 2014-11-14 | 2018-10-02 | Mapper Lithography Ip B.V. | Load lock system and method for transferring substrates in a lithography system |
Also Published As
| Publication number | Publication date |
|---|---|
| TW559863B (en) | 2003-11-01 |
| US20040052632A1 (en) | 2004-03-18 |
| WO2003007340A3 (en) | 2003-11-27 |
| US6969227B2 (en) | 2005-11-29 |
| KR20040015805A (ko) | 2004-02-19 |
| JP4352233B2 (ja) | 2009-10-28 |
| US20030012624A1 (en) | 2003-01-16 |
| KR100940958B1 (ko) | 2010-02-05 |
| CN1320595C (zh) | 2007-06-06 |
| US6877946B2 (en) | 2005-04-12 |
| US20040076505A1 (en) | 2004-04-22 |
| EP1407479A2 (en) | 2004-04-14 |
| JP2004535674A (ja) | 2004-11-25 |
| US6663333B2 (en) | 2003-12-16 |
| WO2003007340A2 (en) | 2003-01-23 |
| AU2002354691A1 (en) | 2003-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1320595C (zh) | 负载锁定室组件和晶片传送设备 | |
| JP6480488B2 (ja) | 基板搬送方法 | |
| CN102686367B (zh) | 驱动装置及输送装置 | |
| US9691649B2 (en) | Linear vacuum robot with z motion and articulated arm | |
| KR100598196B1 (ko) | 반도체 처리 시스템에 있어서의 지지 기구 | |
| US8303764B2 (en) | Apparatus and methods for transporting and processing substrates | |
| KR101292135B1 (ko) | 시저 리프트 이송 로봇 | |
| CN1255235A (zh) | 多个单片晶片气塞晶片处理装置及其装卸方法 | |
| US20070034479A1 (en) | Multi-station workpiece processors, methods of processing semiconductor workpieces within multi-station workpiece processors, and methods of moving semiconductor workpieces within multi-station workpiece processors | |
| EP1661161A2 (en) | Perimeter partition-valve with protected seals | |
| JP2008060577A (ja) | バッファ機構を有する基板処理装置及び基板搬送装置 | |
| KR20010023014A (ko) | 다중스테이션 장비용 웨이퍼 핸들러 | |
| US20120063874A1 (en) | Low profile dual arm vacuum robot | |
| TW201725099A (zh) | 用於在進行電子設備製造時輸送基板的機械手組件、基板處理裝置及方法 | |
| KR100757142B1 (ko) | 웨이퍼 처리 시스템 | |
| CN101459100B (zh) | 紧凑式晶圆自动传输装置 | |
| KR102046279B1 (ko) | 진공로봇을 이용한 이송장치 | |
| CN1783425A (zh) | 基板处理装置 | |
| US20020146303A1 (en) | Wafer handling system and apparatus | |
| CN201374323Y (zh) | 紧凑式晶圆自动传输装置 | |
| TWI474418B (zh) | 基板運送裝置、基板運送系統及運送基板之方法 | |
| KR20000048686A (ko) | 동축 구동 승강 기구 | |
| KR20220170118A (ko) | 기판 처리 장비용 고토크형 매뉴퓰레이터 | |
| SU1484682A1 (ru) | Манипулятор |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20070606 Termination date: 20150712 |
|
| EXPY | Termination of patent right or utility model |