CN1973148A - 控制直升机振动的方法和系统 - Google Patents
控制直升机振动的方法和系统 Download PDFInfo
- Publication number
- CN1973148A CN1973148A CNA2005800191027A CN200580019102A CN1973148A CN 1973148 A CN1973148 A CN 1973148A CN A2005800191027 A CNA2005800191027 A CN A2005800191027A CN 200580019102 A CN200580019102 A CN 200580019102A CN 1973148 A CN1973148 A CN 1973148A
- Authority
- CN
- China
- Prior art keywords
- driver
- resonant driver
- described resonant
- resonant
- control system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F7/00—Vibration-dampers; Shock-absorbers
- F16F7/10—Vibration-dampers; Shock-absorbers using inertia effect
- F16F7/1005—Vibration-dampers; Shock-absorbers using inertia effect characterised by active control of the mass
- F16F7/1011—Vibration-dampers; Shock-absorbers using inertia effect characterised by active control of the mass by electromagnetic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/001—Vibration damping devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/001—Vibration damping devices
- B64C2027/005—Vibration damping devices using suspended masses
Abstract
提供一种用于控制直升机振动的方法和系统,其包括用于有效地生成减振力的减振力生成器。该系统包括具有固有谐振频率的谐振驱动器和谐振驱动器电子控制系统。当被接收的指令信号控制时谐振驱动器电子控制系统将电驱动电流提供到谐振驱动器以谐振频率驱动谐振驱动器。谐振驱动器具有反馈到谐振驱动器电子控制系统的反馈输出,其中谐振驱动器电子控制系统调节基于谐振驱动器反馈输出的电驱动电流以生成减振力。
Description
交叉参考
本申请要求于2004年6月10日申请的申请号为60/578,645的美国临时专利为其优先权,且合并于此作为参考。
技术领域
本发明涉及一种用于控制难以解决的振动的方法和系统,更具体地说,涉及一种用于控制飞机振动的方法和系统,特别是一种用于消除难以解决的旋转机翼直升机振动的方法和系统。
背景技术
因为直升机振动能够引起飞机中乘客疲劳和设备磨损,所以直升机振动是特别令人烦恼的。在例如直升机这样的交通工具中,因为振动能破坏除该交通工具存储信息之外的组成该交通工具的实际结构和零件,所以振动尤其难以解决。
需要正确地和经济地消除交通工具振动的系统和方法。需要正确地和经济地控制振动的系统和方法。需要经济地控制直升机中的振动的切实可行的方法以便于有效地消除和减小振动。需要控制直升机中的振动的坚固系统以便于有效地取消和减小振动。需要用于控制难以解决的直升机振动的经济的方法和系统。
发明内容
本发明包括用于有效地产生减振力的减振力生成器。减振力生成器包括具有固有谐振频率的谐振驱动器,和具有用于接收指令信号的指令输入的谐振驱动器电子控制系统,当被接收的指令信号控制时谐振驱动器电子控制系统将电驱动电流提供到谐振驱动器以谐振频率驱动谐振驱动器,且谐振驱动器具有反馈到谐振驱动器电子控制系统的反馈输出,其中谐振驱动器电子控制系统调节基于谐振驱动器反馈输出的电驱动电流以生成减振力。
本发明包括制造减振力生成器的方法。该方法包括提供具有固有谐振频率的谐振驱动器,提供具有用于接收指令信号的指令输入的谐振驱动器电子控制系统和提供电驱动电流以驱动谐振驱动器的功率放大器,和将谐振驱动器与谐振驱动器电子控制系统连接,其中当被接收的指令信号控制时谐振驱动器电子控制系统电驱动电流以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统,其中谐振驱动器电子控制系统调节基于谐振驱动器电输出的电驱动电流。
本发明包括控制振动的方法。该方法包括提供具有固有谐振频率的谐振驱动器,提供谐振驱动器电子控制系统,该系统提供电驱动电流以驱动谐振驱动器的功率放大器,和谐振驱动器与谐振驱动器电子控制系统连接,以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统且调节基于谐振驱动器电输出的电驱动电流。
本发明包括交通工具减振系统。该交通工具减振系统包括具有固有谐振频率的谐振驱动器。该交通工具减振系统包括将电驱动电流提供到谐振驱动器以固有谐振频率驱动谐振驱动器的谐振驱动器电子控制器。谐振驱动器具有反馈到谐振驱动器电子控制器的反馈电输出,其中所述的谐振驱动器电子控制器调节基于所述谐振驱动器反馈电输出的所述电驱动电流。
本发明包括制造直升机减振系统的方法。该方法包括提供具有固有谐振频率的谐振驱动器。该方法包括提供谐振驱动器电子控制系统,谐振驱动器电子控制系统提供电驱动电流以驱动所述谐振驱动器。该方法包括将谐振驱动器与谐振驱动器电子控制系统连接,其中谐振驱动器电子控制系统电驱动电流以固有谐振频率驱动谐振驱动器,所述的谐振驱动器将电输出反馈到谐振驱动器电子控制系统,其中谐振驱动器电子控制系统调节基于谐振驱动器电输出的电驱动电流。
本发明包括制造直升机振动的方法。该方法包括提供具有固有谐振频率的谐振驱动器。该方法包括将谐振驱动器装配在直升机上。该方法包括提供谐振驱动器电子控制系统,用于提供电驱动电流以驱动谐振驱动器。该方法包括将谐振驱动器与谐振驱动器电子控制系统连接。该方法包括以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统并且调节基于谐振驱动器电输出的电驱动电流。
可以理解的是,前面的概述和下面的详细描述是对本发明示例性的描述,旨在提供综述或框架,用于理解如权利要求所述的本发明的实质内容和特征。附图被包括在其中以提供对本发明的进一步理解,且合并在说明书中和构成说明书的一部分。附图示出了本发明的不同实施例,且与说明一同用于解释本发明的原理和实施。
附图说明
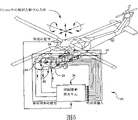
图1示出控制振动的方法和系统。
图2A-D示出控制振动的谐振驱动器。
图3示出控制振动的方法和系统。
图4A-B示出控制振动的方法和系统。
图5示出控制振动的方法和系统。
图6示出控制振动的方法和系统。
图7示出控制振动的方法和系统。
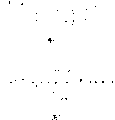
图8是力(N)y-轴和频率(Hz)x-轴的曲线图(用于0.75伏特指令的驱动器力)。
图9是驱动器电流(amps)y-轴和频率(Hz)x-轴的曲线图(用于0.75伏特指令的驱动器电流)。
图10是驱动器电压(volts)y-轴和频率(Hz)x-轴的曲线图(用于0.75伏特指令的驱动器电压)。
图11是驱动器功率(watts)y-轴和频率(Hz)x-轴的曲线图(用于0.75伏特指令的驱动器功率)。
图12是抵抗功率(watts)y-轴和频率(Hz)x-轴的曲线图(用于0.75伏特指令的驱动器功率)。
图13是驱动器质量位移(mm)y-轴和时间(s)x-轴的曲线图(驱动器响应0.75伏特的步进输入)。
图14是驱动器质量位移(mm)y-轴和时间(s)x-轴的曲线图(在22.1Hz驱动器响应0.75伏特指令)。
图15是力(N)y-轴和频率(Hz)x-轴的曲线图(用于0.75伏特指令的驱动器力)。
图16是驱动器电流(amps)y-轴和频率(Hz)x-轴的曲线图(用于0.75伏特指令的驱动器电流)。
图17是驱动器电压(volts)y-轴和频率(Hz)x-轴的曲线图(用于0.75伏特指令的驱动器电压)。
具体实施方式
以下的详细描述将体现本发明的其它特征和优点,通过描述对于本领域技术人员本发明的部分特征和优点是显而易见的,或通过实践在此描述的本发明,本领域技术人员将体会到本发明的其它特征和优点,本发明包括以下详细的说明、权利要求和附图。
现在详细地描述本发明的优选实施例,附图中举例说明了本发明的示例。
本发明包括用于有效地产生减振力的减振力生成器。减振力生成器包括具有固有谐振频率的谐振驱动器,和当被控制时提供电驱动电流到谐振驱动器以固有谐振频率驱动谐振驱动器的谐振驱动器电子控制系统。谐振驱动器具有反馈到谐振驱动器电子控制系统的反馈电输出,其中谐振驱动器电子控制系统调节基于谐振驱动器反馈输出的电驱动电流以生成减振力。
本发明包括用于有效地产生减振力的减振力生成器。减振力生成器包括具有固有谐振频率的谐振驱动器,和具有用于接收指令信号的指令输入的谐振驱动器电子控制系统,当被接收的指令信号控制时谐振驱动器电子控制系统将电驱动电流提供到谐振驱动器以谐振频率驱动谐振驱动器,且谐振驱动器具有反馈到谐振驱动器电子控制系统的反馈输出,其中谐振驱动器电子控制系统调节基于谐振驱动器反馈输出的电驱动电流以生成减振力。如图1-5所示,减振力生成器20有效地产生减振力22,减振力22破坏性地干扰和消除加在构件50上的不希望有的振动力。减振力生成器20优选包括具有固有谐振频率46的线性音圈谐振驱动器24。谐振驱动器24优选为电磁驱动的簧载质量26,其被悬挂在弹性金属弯曲部32上。如图2A-D所示,EM(电磁)驱动质量26优选的悬挂在弹性金属弯曲部32的多层水平倾斜叠加上,金属弯曲部32优选的被两个垂直侧弹性金属弯曲部柱状板支撑,以提供能被电磁驱动以它的固有谐振频率振荡的簧载质量。优选地通过调节电磁场驱动谐振驱动器簧载质量,使得簧载质量被EM场以它的谐振频率吸引和排斥。谐振驱动器簧载质量优选地包括与电磁线圈30成一直线的永久磁铁28,其中施加到EM线圈30的电驱动电流驱动簧载质量谐振。减振力生成器20包括谐振驱动器电子控制系统34。谐振驱动器电子控制系统34优选的具有用于接收指令信号38的指令输入36且谐振驱动器电子控制系统包括生成电驱动电流(i)的功率放大器40。谐振驱动器电子控制系统34提供电驱动电流42到谐振驱动器24当被接收的指令信号38控制时以谐振频率驱动谐振驱动器,谐振驱动器具有反馈到谐振驱动器电子控制系统的反馈输出44,其中谐振驱动器电子控制系统调节基于谐振驱动器反馈输出44的电驱动电流(i)以生成减振力22。优选的,谐振驱动器24的谐振驱动器固有谐振频率范围在15到40Hz间,更优选为15-30Hz间,最优选为18到26Hz间。减振力生成器20能够适应于谐振驱动器24的老化,超过被延长的使用期限范围其改变谐振驱动器固有谐振频率的变化,例如由于随时间金属弯曲部的老化和金属弯曲部的紧固件以及弯曲部的松动,优选地利用谐振驱动器反馈输出44调节驱动电流到谐振驱动器老化固有谐振频率以便于超过延长期控制系统生成的驱动电流能够跟随自振频率的老化改变。优选的,谐振驱动器24的阻尼级小于临界阻尼的百分之四,更优选的阻尼级小于临界阻尼的百分之二。谐振驱动器24优选为轻型阻尼谐振驱动器。谐振驱动器24优选为具有有效阻尼率小于0.5(优选的阻尼率=某一阻尼系数c/临界阻尼系数cT)的轻型阻尼谐振驱动器。减振力生成器20采用具有小阻尼质量弹簧系统高谐振响应的谐振驱动器24,由于高谐振响应驱动器被驱动谐振。指令信号38优选为模拟输入电压,其被指令输入36接收,可变的电压输入指令信号对电子控制系统34发出指令使其生成力22以消除振动构件50中不希望有的振动力。如图4所示,减振力生成器优选地包括电连接器接口52,用于将谐振驱动器24可脱离地连接到谐振驱动器电子控制系统34。这样的电连接器接口优选地包括反馈回路连接器52和电驱动电流连接器52,连接器接口52用于驱动器24和系统34的相互交换以及驱动器24的移位和交换。谐振驱动器反馈输出44优选为谐振驱动器反馈到控制系统34的电输出。在优选实施例中驱动器电输出被直接反馈到控制系统。在如图1所示的优选实施例中,没有使用用于产生反馈输出的物理分离的驱动器运动传感器,电反馈输出44直接来于驱动器和控制系统驱动电流。谐振驱动器电反馈输出44优选为流过谐振驱动器的电荷流率(i),通过驱动器的电流(i_act)反馈到控制系统,控制和限制驱动器驱动电流(i)到最大工作值。控制系统优选地使用电流(i_act)反馈44控制驱动电流(i)以驱动驱动器谐振且不需要成形滤波。在一个实施例中谐振驱动器反馈输出44是通过谐振驱动器24的电势差,电压(v_act)跨过驱动器被反馈到控制系统,驱动器中的电压被控制和限制到与驱动器额定电压对应的最大值,用于谐振驱动器最大的工作位移。在一个实施例中谐振驱动器反馈输出44是流过谐振驱动器的电流(i_act)和通过谐振驱动器的电势差(v_act),电压和电流从驱动器24被反馈。
本发明包括制造减振力生成器的方法。该方法包括提供具有固有谐振频率的谐振驱动器,提供具有用于提供电驱动电流以驱动谐振驱动器的功率放大器的谐振驱动器电子控制系统,和将谐振驱动器与谐振驱动器电子控制系统连接,其中当被接收的指令信号控制时谐振驱动器电子控制系统电驱动电流以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统,其中谐振驱动器电子控制系统调节基于谐振驱动器电输出的电驱动电流。
本发明包括制造减振力生成器20的方法。该方法包括提供具有固有谐振频率的谐振驱动器24,提供具有接收指令信号的指令输入的谐振驱动器电子控制系统34和用于提供电驱动电流(i)以驱动谐振驱动器的功率放大器,和将谐振驱动器与谐振驱动器电子控制系统连接,其中当被接收的指令信号控制时谐振驱动器电子控制系统电驱动电流(i)以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出44反馈到谐振驱动器电子控制系统,其中谐振驱动器电子控制系统调节基于谐振驱动器电输出44的电驱动电流(i)。提供谐振驱动器24优选包括提供电磁驱动的音圈,优选地通过调节由EM线圈30产生的电磁场驱动簧载质量26,使得簧载质量被EM场吸引和排斥且驱动器以它的固有谐振频率谐振。提供谐振驱动器电子控制系统34优选地包括提供具有用于接收指令信号38的指令输入36的谐振驱动器电子控制系统34和用于提供电驱动电流(i)以谐振频率驱动谐振驱动器的功率放大器40。指令信号38优选为模拟输入电压,模拟的可变电压输入指令信号对控制系统发出指令使其生成减振力22,其破坏性的干扰和消除构件50中的不希望有的振动力,驱动器24配置在构件50上。在例如如图1所示的优选实施例中,驱动器电输出44被直接反馈到控制系统,优选地不需要用于产生反馈输出的物理分离的驱动器运动传感器。在可选择的实施例中,例如如图4所示,谐振驱动器电输出44包括来自驱动器传感器54的驱动器传感器电输出。驱动器传感器54提供与驱动器24的物理移动特性相关的驱动器电输出44,例如运动传感器检测移动质量26的位移。在一个实施例中,驱动器传感器54是配置在驱动簧载质量的驱动器上的加速度计。在一个实施例中,驱动器传感器54是测量和检测驱动簧载质量的驱动器的速度的速度传感器。在一个实施例中,驱动器传感器54是测量和检测驱动簧载质量的驱动器的位移和位置的运动传感器。提供谐振驱动器24,优选地包括提供固有谐振频率范围在15到40Hz间,更优选为15-30Hz间,最优选为18到26Hz间的谐振驱动器。提供谐振驱动器24,优选地包括提供阻尼级小于临界阻尼的百分之四,更优选地阻尼级小于临界阻尼的百分之二的谐振驱动器。谐振驱动器24优选为具有有效阻尼率小于0.5(优选的阻尼率=某一阻尼系数c/临界阻尼系数cT)的轻型阻尼谐振驱动器。驱动器24优选地具有小阻尼质量弹簧系统的高谐振响应。在一个实施例中该方法包括提供用于将谐振驱动器24可脱离地连接到谐振驱动器电子控制系统34的电连接器接口52,优选地包括反馈输出回路连接器52,和电驱动电流连接器52,脱开和接合用于驱动器24和控制系统34的相互交换的连接器接口,用于移位和交换被控制系统34驱动的驱动器24。反馈电反馈44优选地包括反馈流过谐振驱动器的电荷流率。流过谐振驱动器24的电流(i)作为被控制和限制到最大工作值的驱动电流(i_act)反馈到控制系统,更优选地没有使用成形滤波驱动驱动器24。在本发明的一个实施例中,反馈电反馈44优选地包括反馈流过谐振驱动器的电势差。电压(v_act)跨过驱动器被反馈到控制系统,电压被控制和限制到与驱动器24的额定电压对应的最大值,用于谐振驱动器最大的工作位移。在一个实施例中反馈电反馈44优选地包括反馈流过谐振驱动器的电荷流率和通过谐振驱动器的电势差,电压和电流从驱动器被反馈。
本发明包括控制振动的方法。该方法包括提供具有固有谐振频率的谐振驱动器,提供谐振驱动器电子控制系统,该系统提供电驱动电流以驱动谐振驱动器,将谐振驱动器与谐振驱动器电子控制系统连接,以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统且调节基于谐振驱动器电输出的电驱动电流。
本发明包括控制振动的方法。该方法包括提供具有固有谐振频率的音圈谐振驱动器24,优选地通过调节电磁场驱动电磁驱动的簧载质量,使得簧载质量被EM场吸引和排斥。该方法包括提供用于提供电驱动电流以驱动谐振驱动器的谐振驱动器电子控制系统34,和谐振驱动器与谐振驱动器电子控制系统连接。该方法包括以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统且调节基于谐振驱动器电输出的电驱动电流。提供谐振驱动器24优选地包括提供固有谐振频率范围在15到40Hz间,更优选为15-30Hz间,最优选为18到26Hz间的谐振驱动器。提供谐振驱动器24,优选地包括提供阻尼级小于临界阻尼的百分之四,更优选地阻尼级小于临界阻尼的百分之二的谐振驱动器。轻型阻尼谐振驱动器24优选地具有小于0.5的有效阻尼率(阻尼率=某一阻尼系数c/临界阻尼系数cT),驱动器具有小阻尼质量弹簧系统的高谐振响应。该方法优选地包括提供用于将谐振驱动器可脱离地连接到谐振驱动器电子控制系统的电连接器接口52。谐振驱动器电输出44优选为流过谐振驱动器的电势差,该电压跨过驱动器被反馈到控制系统,该电压被控制/限制到与驱动器的额定电压对应的最大值,用于谐振驱动器最大的工作位移。谐振驱动器的电输出44优选为流过谐振驱动器的电荷流率。谐振驱动器的电输出优选为流过谐振驱动器的电荷流率和通过谐振驱动器的电势差。在一个实施例中,谐振驱动器的电输出是驱动器传感器电输出。
本发明包括交通工具减振系统。该交通工具减振系统包括具有固有谐振频率的谐振驱动器。该交通工具减振系统包括将电驱动电流提供到谐振驱动器以固有谐振频率驱动谐振驱动器的谐振驱动器电子控制器。谐振驱动器具有反馈到谐振驱动器电子控制器的反馈电输出,其中所述的谐振驱动器电子控制器调节基于所述谐振驱动器反馈电输出的所述电驱动电流。
本发明包括交通工具减振系统。飞机减振系统包括具有固有谐振频率的谐振驱动器24,和谐振驱动器电子控制器34,谐振驱动器电子控制器将电驱动电流提供到谐振驱动器以固有谐振频率驱动谐振驱动器,谐振驱动器具有反馈电输出,反馈电输出反馈到谐振驱动器电子控制器,其中谐振驱动器电子控制器调节基于所述谐振驱动器反馈电输出的电驱动电流以生成减振力22用于消除交通工具振动构件50上的振动。谐振驱动器24优选为电磁驱动的簧载质量26,其被悬挂在弹性金属弯曲部32上。如图2A-D所示,EM(电磁)驱动质量26优选的悬挂在弹性金属弯曲部32的多层水平倾斜叠加上,金属弯曲部32优选的被两个垂直侧弹性金属弯曲部柱状板支撑,以提供能被电磁驱动以它的固有谐振频率振荡的簧载质量。优选地通过调节电磁场驱动谐振驱动器簧载质量,使得簧载质量被EM场以它的谐振频率吸引和排斥。谐振驱动器簧载质量优选地包括与电磁线圈30成一直线的永久磁铁28,其中施加到EM线圈30的电驱动电流驱动簧载质量谐振。减振力生成器20包括谐振驱动器电子控制系统34。谐振驱动器电子控制系统34优选的具有用于接收指令信号38的指令输入36且谐振驱动器电子控制系统包括生成电驱动电流(i)的功率放大器40。谐振驱动器电子控制系统34提供电驱动电流42到谐振驱动器24当被接收的指令信号38控制时以谐振频率驱动谐振驱动器,谐振驱动器具有反馈到谐振驱动器电子控制系统的反馈输出44,其中谐振驱动器电子控制系统调节基于谐振驱动器反馈输出44的电驱动电流(i)以生成减振力22。优选的,谐振驱动器24具有范围在15到40Hz间,更优选为15-30Hz间,最优选为18到26Hz间的固有谐振频率。减振力生成器20能够适应于谐振驱动器24的老化,超过被延长的使用期限范围其改变谐振驱动器固有谐振频率的变化,例如由于随时间金属弯曲部的老化和金属弯曲部的紧固件以及弯曲部的松动,优选地利用谐振驱动器反馈输出44调节驱动电流到谐振驱动器老化固有谐振频率以便于超过延长期控制系统生成的驱动电流能够跟随自振频率的老化改变。优选的,谐振驱动器24的阻尼级小于临界阻尼的百分之四,更优选的阻尼级小于临界阻尼的百分之二。谐振驱动器24优选为轻型阻尼谐振驱动器。谐振驱动器24优选为具有有效阻尼率小于0.5(优选的阻尼率=某一阻尼系数c/临界阻尼系数cT)的轻型阻尼谐振驱动器。减振力生成器20采用具有小阻尼质量弹簧系统高谐振响应的谐振驱动器24,由于高谐振响应驱动器被驱动谐振。指令信号38优选为模拟输入电压,其被指令输入36接收,可变的电压输入指令信号对电子控制系统34发出指令使其生成力22以消除振动构件50中不希望有的振动力。如图4所示,减振力生成器优选地包括电连接器接口52,用于将谐振驱动器24可脱离地连接到谐振驱动器电子控制系统34。这样的电连接器接口优选地包括反馈回路连接器52和电驱动电流连接器52,连接器接口52用于驱动器24和系统34的相互交换以及驱动器24的移位和交换。谐振驱动器反馈输出44优选为谐振驱动器反馈到控制系统34的电输出。在优选实施例中驱动器电输出被直接反馈到控制系统。在如图1所示的优选实施例中,没有使用用于产生反馈输出的物理分离的驱动器运动传感器,电反馈输出44直接来于驱动器和控制系统驱动电流。谐振驱动器电反馈输出44优选为流过谐振驱动器的电荷流率(i),通过驱动器的电流(i_act)反馈到控制系统,控制和限制驱动器驱动电流(i)到最大工作值。控制系统优选地使用电流(i_act)反馈44控制驱动电流(i)以驱动驱动器谐振且不需要成形滤波。在一个实施例中谐振驱动器反馈输出44是通过谐振驱动器24的电势差,电压(v_act)跨过驱动器被反馈到控制系统,驱动器中的电压被控制和限制到与驱动器额定电压对应的最大值,用于谐振驱动器最大的工作位移。在一个实施例中谐振驱动器反馈输出44是通过谐振驱动器的电流(i_act)和通过谐振驱动器的电势差,电压和电流从驱动器24被反馈。
本发明包括制造直升机减振系统的方法。该方法包括提供具有固有谐振频率的谐振驱动器。该方法包括提供谐振驱动器电子控制系统,用于提供电驱动电流以驱动谐振驱动器。该方法包括将谐振驱动器与谐振驱动器电子控制系统连接,其中谐振驱动器电子控制系统电驱动电流以固有谐振频率驱动谐振驱动器,所述的谐振驱动器将电输出反馈到谐振驱动器电子控制系统,其中谐振驱动器电子控制系统调节基于谐振驱动器电输出的电驱动电流。
本发明包括制造直升机减振系统的方法,用于消除直升机中产生的振动。该方法包括提供具有固有谐振频率的谐振驱动器24,提供谐振驱动器电子控制系统34,用于提供电驱动电流以驱动谐振驱动器,和将谐振驱动器与谐振驱动器电子控制系统连接,其中谐振驱动器电子控制系统电驱动电流以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出44反馈到谐振驱动器电子控制系统,其中谐振驱动器电子控制系统调节基于谐振驱动器电输出的电驱动电流。提供谐振驱动器24优选包括提供电磁驱动的音圈,优选地通过调节由EM线圈30产生的电磁场驱动簧载质量26,使得簧载质量被EM场吸引和排斥且驱动器以它的固有谐振频率谐振。提供谐振驱动器电子控制系统34优选地包括提供具有用于接收指令信号38的指令输入36和用于提供电驱动电流(i)以谐振频率驱动谐振驱动器的功率放大器40。指令信号38优选为模拟输入电压,模拟的可变电压输入指令信号对控制系统发出指令使其生成减振力22,其破坏性的干扰和消除构件50中的不希望有的振动力,驱动器24配置在构件50上。在例如如图1所示的优选实施例中,驱动器电输出44被直接反馈到控制系统,优选地不需要用于产生反馈输出的物理分离的驱动器运动传感器。在可选择的实施例中,例如如图4所示,谐振驱动器电输出44包括来自驱动器传感器54的驱动器传感器电输出。驱动器传感器54提供与驱动器24的物理移动特性相关的驱动器电输出44,例如运动传感器检测移动质量26的运动。在一个实施例中,驱动器传感器54是配置在驱动簧载质量的驱动器上的加速度计。在一个实施例中,驱动器传感器54是测量和检测驱动簧载质量的驱动器的速度的速度传感器。在一个实施例中,驱动器传感器54是测量和检测驱动簧载质量的驱动器的位移和位置的运动传感器。提供谐振驱动器24,优选地包括提供固有谐振频率范围在15到40Hz间,更优选为15-30Hz间,最优选为18到26Hz间的谐振驱动器。提供谐振驱动器24,优选地包括提供阻尼级小于临界阻尼的百分之四,更优选地阻尼级小于临界阻尼的百分之二的谐振驱动器。谐振驱动器24优选为具有有效阻尼率小于0.5(优选的阻尼率=某一阻尼系数c/临界阻尼系数cT)的轻型阻尼谐振驱动器。驱动器24优选地具有小阻尼质量弹簧系统的高谐振响应。在一个实施例中该方法包括提供用于将谐振驱动器24可脱离地连接到谐振驱动器电子控制系统34的电连接器接口52,优选地包括反馈回路连接器52,和电驱动电流连接器52,脱开和接合用于驱动器24和控制系统34的相互交换的连接器接口,用于移位和交换被控制系统34驱动的驱动器24。反馈电反馈44优选地包括反馈流过谐振驱动器的电荷流率。流过谐振驱动器24的电流(i)作为被控制和限制到最大工作值的驱动电流(i_act)反馈到控制系统,更优选地没有使用成形滤波驱动驱动器24。在本发明的一个实施例中,反馈电反馈44优选地包括反馈流过谐振驱动器的电势差。电压(v_act)跨过驱动器被反馈到控制系统,电压被控制和限制到与驱动器24的额定电压对应的最大值,用于谐振驱动器最大的工作位移。在一个实施例中反馈电反馈44优选地包括反馈流过谐振驱动器的电荷流率和通过谐振驱动器的电势差,电压和电流从驱动器被反馈。
本发明包括控制直升机振动的方法。该方法包括提供具有固有谐振频率的谐振驱动器。该方法包括将谐振驱动器装配在直升机上。该方法包括提供谐振驱动器电子控制系统,用于提供电驱动电流以驱动谐振驱动器。该方法包括将谐振驱动器与谐振驱动器电子控制系统连接。该方法包括以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统并且调节基于谐振驱动器电输出的电驱动电流。
本发明包括控制直升机振动的方法。该方法包括提供具有固有谐振频率的谐振驱动器24,将直升机上的谐振驱动器配置在直升机的振动构件50上,提供谐振驱动器电子控制系统34,用于提供电驱动电流以驱动谐振驱动器,将谐振驱动器与谐振驱动器电子控制系统连接,以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统并且调节基于谐振驱动器电输出的电驱动电流。该方法包括以固有谐振频率驱动谐振驱动器,谐振驱动器将电输出反馈到谐振驱动器电子控制系统并且调节基于谐振驱动器电输出的电驱动电流。提供谐振驱动器24优选地包括提供固有谐振频率范围在15到40Hz间,更优选为15-30Hz间,最优选为18到26Hz间的谐振驱动器。提供谐振驱动器24,优选地包括提供阻尼级小于临界阻尼的百分之四,更优选地阻尼级小于临界阻尼的百分之二的谐振驱动器。轻型阻尼谐振驱动器24优选地具有小于0.5的有效阻尼率(阻尼率=某一阻尼系数c/临界阻尼系数cT),驱动器具有小阻尼质量弹簧系统的高谐振响应。该方法优选地包括提供用于将谐振驱动器可脱离地连接到谐振驱动器电子控制系统的电连接器接口52。谐振驱动器反馈的电输出44优选为流过谐振驱动器的电势差,该电压跨过驱动器被反馈到控制系统,该电压被控制/限制到与驱动器的额定电压对应的最大值,用于谐振驱动器最大的工作位移。谐振驱动器的电输出44优选为流过谐振驱动器的电荷流率。谐振驱动器的电输出优选为流过谐振驱动器的电荷流率和通过谐振驱动器的电势差。在一个实施例中,谐振驱动器的电输出是驱动器传感器电输出。
本发明采用调整放大器的电流回路来提供不使用成形滤波器的力的成形,以这样的调整限制最大电流和功率,最大电流和功率以远离谐振的频率被传送到驱动器,使移动的质量位移保持在谐振的疲劳限制之下。放大器与接近于谐振频率的电压控制放大器一样运行且电流控制放大器远离谐振。因为驱动器电压与接近于谐振的弯曲部位移成正比,将驱动器电压限制在接近于谐振以保护驱动器不被超速传动。优选地调整放大器的转导率倾角的幅值以限制谐振的位移并且调整放大器的通带增益为了限制电流/功率远离谐振频率。本发明中的系统适应于谐振频率的变化。本发明中安装驱动器不需要数据且在系统中不需要成形滤波器。不对电子控制系统进行任何改变和/或调整就能对本发明中的驱动器进行改变、交换、修理和/或替换。
图6示出控制振动驱动器系统的示意图。驱动器系统采用以下公式建模:
Fα(t)=-αi
图7是LUICU的电流回路的示意图。示意图中的五个增益(g1到g5)优选地被最优化以获得期望的性能。优选地对回路最优化,在控制方案中对五个参数最优化:
输入增益g1
补偿器增益g2,g3,g4
反馈回路增益g5
优选地对回路最优化,需要考虑两点:
1)系统不超出物理限制;
2)系统具有足够的稳定裕度。
优选地,通过耦合的最优化学习和稳定性分析来确定这些增益,几个价值函数被用于最优化且它们导致不同的结果,下面是例子和它们的比较:
其中Imax和Pmax分别是容许的电流和功率的最大值。Freq是期望的力。
为了简化和示例的目的,两个增益g1和g5采用下述值被优化:
Imax=5amps,Pmax=100watts和Freq=3000N
w1=300,w2=1和w3=6
ω1=10Hz,ωn=21.6Hz
下表表示用于三个价值函数的最优化的增益。用于13Kg移动的质量的系统被最优化。
| 价值函数 | g1 | g5 |
| Φ1 | 0.95555 | 0.10654 |
| Φ2 | 1.0396 | 0.2585 |
| Φ3 | 0.96887 | 0.13062 |
图8-17的曲线图显示了该方法/系统的性能。在实现和实验中在LCICU放大器卡中执行测试该回路的改变并且测试该系统。采用下述值进行测试:
g1=0.295,g2=50,g3=2*pi*2.4,g4=2*pi*354,g5=0.1245;驱动器质量为14.2和谐振为21.72时进行测试;质量为13时进行最优化;测试证实系统性能在规格之内。注意到质量预测对于限制力是重要的,因为我们调整谐振加速度且没有力。
显然在不背离本发明的精神和范围情况下本领域技术人员能对本发明进行不同的调整和改变。因此,本发明希望覆盖所附权利要求和它的等效物范围内对本发明的调整和改变。
Claims (50)
1.一种用于有效地产生减振力的减振力生成器,所述减振力生成器包括:具有固有谐振频率的谐振驱动器,和具有用于接收指令信号的指令输入的谐振驱动器电子控制系统,当被接收的指令信号控制时所述谐振驱动器电子控制系统将电驱动电流提供到所述谐振驱动器以所述谐振频率驱动所述谐振驱动器,所述谐振驱动器具有反馈输出,所述反馈输出反馈到谐振驱动器电子控制系统,其中所述谐振驱动器电子控制系统调节基于所述谐振驱动器反馈输出的所述电驱动电流以生成所述减振力。
2.如权利要求1所述的减振力生成器,其中,所述谐振驱动器的固有谐振频率在15到40Hz范围之间。
3.如权利要求1所述的减振力生成器,其中,所述谐振驱动器的固有谐振频率在18到26Hz范围之间。
4.如权利要求1所述的减振力生成器,其中,所述谐振驱动器的阻尼级小于临界阻尼的百分之四。
5.如权利要求1所述的减振力生成器,其中,所述谐振驱动器是轻型阻尼谐振驱动器。
6.如权利要求1所述的减振力生成器,其中,所述的指令信号是模拟输入电压。
7.如权利要求1所述的减振力生成器,包括电连接器接口,用于将所述谐振驱动器可脱离地连接到所述谐振驱动器电子控制系统。
8.如权利要求1所述的减振力生成器,其中,所述的谐振驱动器反馈输出是电输出。
9.如权利要求1所述的减振力生成器,其中,所述的谐振驱动器反馈输出是通过所述谐振驱动器的电势差。
10.如权利要求1所述的减振力生成器,其中,所述的谐振驱动器反馈输出是流过所述谐振驱动器的电荷流率。
11.如权利要求1所述的减振力生成器,其中,所述的谐振驱动器反馈输出是流过所述谐振驱动器的电荷流率和通过所述谐振驱动器的电势差。
12.一种制造减振力生成器的方法,所述方法包括如下步骤:提供具有固有谐振频率的谐振驱动器,提供具有用于接收指令信号的指令输入的谐振驱动器电子控制系统和提供电驱动电流以驱动谐振驱动器的功率放大器,将所述谐振驱动器与所述谐振驱动器电子控制系统连接,其中当被接收的指令信号控制时所述谐振驱动器电子控制系统电驱动电流以所述固有谐振频率驱动所述谐振驱动器,所述谐振驱动器将电输出反馈到所述谐振驱动器电子控制系统,其中所述谐振驱动器电子控制系统调节基于所述谐振驱动器电输出的所述电驱动电流。
13.如权利要求12所述的方法,其中,提供谐振驱动器包括提供具有固有谐振频率在15到40Hz范围之间的谐振驱动器。
14.如权利要求12所述的方法,其中,所述谐振驱动器的阻尼级小于临界阻尼的百分之四。
15.如权利要求12所述的方法,其中,所述的方法包括提供电连接器接口,用于将所述谐振驱动器可脱离地连接到所述谐振驱动器电子控制系统。
16.如权利要求12所述的方法,其中,所述的谐振驱动器电输出是通过所述谐振驱动器的电势差。
17.如权利要求12所述的方法,其中,所述的谐振驱动器电输出是流过所述谐振驱动器的电荷流率。
18.如权利要求12所述的方法,其中,所述的谐振驱动器电输出是流过所述谐振驱动器的电荷流率和通过所述谐振驱动器的电势差。
19.一种控制振动的方法,所述方法包括如下步骤:提供具有固有谐振频率的谐振驱动器,提供谐振驱动器电子控制系统,该系统提供电驱动电流以驱动谐振驱动器的功率放大器,将谐振驱动器与谐振驱动器电子控制系统连接,以固有谐振频率驱动谐振驱动器,所述谐振驱动器将电输出反馈到所述谐振驱动器电子控制系统且调节基于所述谐振驱动器电输出的所述电驱动电流。
20.如权利要求19所述的方法,其中,提供谐振驱动器包括提供具有固有谐振频率在15到40Hz范围之间的谐振驱动器。
21.如权利要求20所述的方法,其中,所述谐振驱动器的阻尼级小于临界阻尼的百分之四。
22.如权利要求20所述的方法,其中,所述的方法包括提供电连接器接口,用于将所述谐振驱动器可脱离地连接到所述谐振驱动器电子控制系统。
23.如权利要求20所述的方法,其中,所述的谐振驱动器电输出是通过所述谐振驱动器的电势差。
24.如权利要求20所述的方法,其中,所述的谐振驱动器电输出是流过所述谐振驱动器的电荷流率。
25.如权利要求20所述的方法,其中,所述的谐振驱动器电输出是流过所述谐振驱动器的电荷流率和通过所述谐振驱动器的电势差。
26.如权利要求20所述的方法,其中,所述的谐振驱动器电输出是驱动器传感器电输出。
27.一种交通工具减振系统,所述交通工具减振系统包括:具有固有谐振频率的谐振驱动器和谐振驱动器电子控制器,所述谐振驱动器电子控制器将电驱动电流提供到谐振驱动器以固有谐振频率驱动谐振驱动器,所述谐振驱动器具有反馈电输出,所述反馈电输出被反馈到所述谐振驱动器电子控制器,其中所述的谐振驱动器电子控制器调节基于所述谐振驱动器反馈电输出的所述电驱动电流。
28.如权利要求27所述的交通工具减振系统,其中,所述谐振驱动器的固有谐振频率在15到40Hz范围之间。
29.如权利要求27所述的交通工具减振系统,其中,所述谐振驱动器的阻尼级小于临界阻尼的百分之四。
30.如权利要求27所述的交通工具减振系统,其中,所述谐振驱动器是轻型阻尼谐振驱动器。
31.如权利要求27所述的交通工具减振系统,包括电连接器接口,用于将所述谐振驱动器可脱离地连接到所述谐振驱动器电子控制器。
32.如权利要求27所述的交通工具减振系统,其中,所述的谐振驱动器反馈输出是通过所述谐振驱动器的电势差。
33.如权利要求27所述的交通工具减振系统,其中,所述的谐振驱动器反馈输出是流过所述谐振驱动器的电荷流率。
34.如权利要求27所述的交通工具减振系统,其中,所述的谐振驱动器反馈输出是流过所述谐振驱动器的电荷流率和通过所述谐振驱动器的电势差。
35.如权利要求27所述的交通工具减振系统,其中,所述的谐振驱动器电输出是驱动器传感器电输出。
36.一种制造直升机减振系统的方法,方法包括如下步骤:提供具有固有谐振频率的谐振驱动器,提供谐振驱动器电子控制系统,用于提供电驱动电流以驱动谐振驱动器,将所述谐振驱动器与所述谐振驱动器电子控制系统连接,其中所述谐振驱动器电子控制系统电驱动电流以所述固有谐振频率驱动所述谐振驱动器,所述谐振驱动器将电输出反馈到所述谐振驱动器电子控制系统,其中所述谐振驱动器电子控制系统调节基于谐振驱动器电输出的电驱动电流。
37.如权利要求36所述的方法,其中,提供谐振驱动器包括提供具有固有谐振频率在15到40Hz范围之间的谐振驱动器。
38.如权利要求36所述的方法,其中,所述谐振驱动器的阻尼级小于临界阻尼的百分之四。
39.如权利要求36所述的方法,其中,所述的方法包括提供电连接器接口,用于将所述谐振驱动器可脱离地连接到所述谐振驱动器电子控制系统。
40.如权利要求36所述的方法,其中,所述的谐振驱动器电输出是通过所述谐振驱动器的电势差。
41.如权利要求36所述的方法,其中,所述的谐振驱动器电输出是流过所述谐振驱动器的电荷流率。
42.如权利要求36所述的方法,其中,所述的谐振驱动器电输出是流过所述谐振驱动器的电荷流率和通过所述谐振驱动器的电势差。
43.一种控制直升机振动的方法,所述方法包括如下步骤:提供具有固有谐振频率的谐振驱动器,将所述谐振驱动器装配在直升机上,提供谐振驱动器电子控制系统,用于提供电驱动电流以驱动谐振驱动器,将所述谐振驱动器与所述谐振驱动器电子控制系统连接,以固有谐振频率驱动所述谐振驱动器,所述谐振驱动器将电输出反馈到所述谐振驱动器电子控制系统并且调节基于所述谐振驱动器电输出的所述电驱动电流。
44.如权利要求43所述的方法,其中,提供谐振驱动器包括提供具有固有谐振频率在15到40Hz范围之间的谐振驱动器。
45.如权利要求43所述的方法,其中,所述谐振驱动器的阻尼级小于临界阻尼的百分之四。
46.如权利要求43所述的方法,其中,所述的方法包括提供电连接器接口,用于将所述谐振驱动器可脱离地连接到所述谐振驱动器电子控制系统。
47.如权利要求43所述的方法,其中,所述的谐振驱动器电输出是通过所述谐振驱动器的电势差。
48.如权利要求43所述的方法,其中,所述的谐振驱动器电输出是流过所述谐振驱动器的电荷流率。
49.如权利要求43所述的方法,其中,所述的谐振驱动器电输出是流过所述谐振驱动器的电荷流率和通过所述谐振驱动器的电势差。
50.如权利要求43所述的方法,其中,所述的谐振驱动器电输出是驱动器传感器电输出。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US57864504P | 2004-06-10 | 2004-06-10 | |
| US60/578,645 | 2004-06-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1973148A true CN1973148A (zh) | 2007-05-30 |
| CN100535473C CN100535473C (zh) | 2009-09-02 |
Family
ID=36591328
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2005800191027A Expired - Fee Related CN100535473C (zh) | 2004-06-10 | 2005-06-10 | 控制直升机振动的方法和系统 |
Country Status (4)
| Country | Link |
|---|---|
| US (3) | US7370829B2 (zh) |
| EP (1) | EP1766261B1 (zh) |
| CN (1) | CN100535473C (zh) |
| WO (1) | WO2006083295A1 (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102890464A (zh) * | 2012-09-29 | 2013-01-23 | 西安电子科技大学 | 大跨度悬臂桁架的提升及振动运动控制方法 |
| CN102056798B (zh) * | 2008-04-07 | 2014-05-28 | 洛德公司 | 用于消除振动的直升机轮轴安装振动控制器和圆周力产生系统 |
| CN104670487A (zh) * | 2013-10-03 | 2015-06-03 | 奥格斯塔韦斯兰股份公司 | 悬停式飞行器旋翼及悬停式飞行器 |
| CN105257750A (zh) * | 2015-11-19 | 2016-01-20 | 西安空间无线电技术研究所 | 一种多模态电磁吸振器 |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1766261B1 (en) * | 2004-06-10 | 2012-02-08 | Lord Corporation | A method and system for controlling helicopter vibrations |
| US8162606B2 (en) | 2004-08-30 | 2012-04-24 | Lord Corporation | Helicopter hub mounted vibration control and circular force generation systems for canceling vibrations |
| US8267652B2 (en) | 2004-08-30 | 2012-09-18 | Lord Corporation | Helicopter hub mounted vibration control and circular force generation systems for canceling vibrations |
| WO2006135405A2 (en) | 2004-08-30 | 2006-12-21 | Lord Corporation | Helicopter vibration control system and rotary force generator for canceling vibrations |
| US7722322B2 (en) | 2004-08-30 | 2010-05-25 | Lord Corporation | Computer system and program product for controlling vibrations |
| WO2007129627A1 (ja) | 2006-05-08 | 2007-11-15 | Shinko Electric Co., Ltd. | 自動車車体の振動を低減する自動車用制振装置 |
| CA2665700C (en) * | 2006-10-12 | 2013-11-19 | Bell Helicopter Textron Inc. | Vibration-attenuating hard-mounted pylon |
| EP2209713B1 (en) * | 2007-10-25 | 2013-09-25 | Lord Corporation | Distributed active vibration control systems and rotary wing aircraft with suppressed vibrations |
| WO2009126608A2 (en) * | 2008-04-07 | 2009-10-15 | Lord Corporation | Helicopter vibration control system and circular force generation system for canceling vibrations |
| DE102008025298B4 (de) * | 2008-05-27 | 2010-12-16 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zur aktiven Dämpfung von Vertikalschwingungen bei einem Hubschrauber mit angehängter Außenlast |
| CA2742798A1 (en) * | 2008-11-04 | 2010-05-14 | Lord Corporation | Resonant inertial force generator having stable natural frequency |
| WO2010099521A1 (en) * | 2009-02-27 | 2010-09-02 | Bell Helicopter Textron Inc. | System and method for vibration control in a rotorcraft using an adaptive reference model algorithm |
| US8129870B1 (en) * | 2009-08-04 | 2012-03-06 | Pusl Kenneth E | Asymmetric folded spring flexure suspension system for reciprocating devices |
| JP5022457B2 (ja) * | 2010-02-17 | 2012-09-12 | 三菱重工業株式会社 | 振動低減装置および振動低減方法 |
| US8190307B2 (en) * | 2010-08-23 | 2012-05-29 | King Fahd University Of Petroleum & Minerals | Control optimization method for helicopters carrying suspended loads |
| KR101752645B1 (ko) * | 2011-02-04 | 2017-06-30 | 로오드 코포레이션 | 공진 관성형 액추에이터를 구비한 회전익 항공기 진동 제어 시스템 |
| JP5863528B2 (ja) * | 2012-03-23 | 2016-02-16 | 三菱重工業株式会社 | 振動低減装置 |
| US9274602B2 (en) * | 2012-10-30 | 2016-03-01 | Texas Instruments Incorporated | Haptic actuator controller |
| CN103884285B (zh) * | 2012-12-21 | 2017-08-29 | 中国直升机设计研究所 | 一种动部件位移量的测试方法 |
| JP6144090B2 (ja) * | 2013-04-08 | 2017-06-07 | 樋口 俊郎 | 電磁アクチュエータ |
| US9344022B2 (en) | 2013-09-11 | 2016-05-17 | Qualcomm Incorporated | Circuits and methods for driving resonant actuators |
| US9689453B2 (en) * | 2014-02-06 | 2017-06-27 | Asm Technology Singapore Pte. Ltd. | Active vibration absorber |
| US9146557B1 (en) * | 2014-04-23 | 2015-09-29 | King Fahd University Of Petroleum And Minerals | Adaptive control method for unmanned vehicle with slung load |
| WO2016048442A1 (en) * | 2014-09-26 | 2016-03-31 | Sikorsky Aircraft Corporation | Damage adaptive vibration control |
| JP6412409B2 (ja) * | 2014-11-07 | 2018-10-24 | Kyb株式会社 | サスペンション装置およびサスペンション制御装置 |
| DE102016223864A1 (de) * | 2016-11-30 | 2018-05-30 | Audi Ag | Aktives Schwingungsabsorptionssystem zur Absorption einer Schwingung eines schwingenden Elements sowie Kraftfahrzeug mit dem aktiven Schwingungsabsorptionssystem und Verfahren zum Betreiben des aktiven Schwingungsabsorptionssystems |
| FR3064037B1 (fr) | 2017-03-16 | 2019-03-22 | Airbus Helicopters | Dispositif de suspension antivibratoire d'un element mecanique, et aeronef. |
| US10648529B2 (en) | 2017-11-21 | 2020-05-12 | Bell Helicopter Textron Inc. | Hydraulic vibration control |
| US11118906B2 (en) * | 2019-03-29 | 2021-09-14 | Property Management Co., Ltd. | Oscillator circuit including oscillator |
Family Cites Families (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4479098A (en) * | 1981-07-06 | 1984-10-23 | Watson Industries, Inc. | Circuit for tracking and maintaining drive of actuator/mass at resonance |
| US4497098A (en) | 1982-09-07 | 1985-02-05 | Hitco | Fill yarn removal apparatus |
| US4483425A (en) * | 1982-09-09 | 1984-11-20 | North American Philips Corporation | Vibration control system |
| US4819182A (en) * | 1985-06-21 | 1989-04-04 | Westland Plc | Method and apparatus for reducing vibration of a helicopter fuselage |
| US4808955A (en) * | 1987-10-05 | 1989-02-28 | Bei Electronics, Inc. | Moving coil linear actuator with interleaved magnetic circuits |
| US4922159A (en) * | 1988-05-09 | 1990-05-01 | Harris Corporation | Linear precision actuator with accelerometer feedback |
| US5231336A (en) * | 1992-01-03 | 1993-07-27 | Harman International Industries, Inc. | Actuator for active vibration control |
| US5219037A (en) * | 1992-01-21 | 1993-06-15 | General Motors Corporation | Component mount assembly providing active control of vehicle vibration |
| US5278913A (en) * | 1992-07-28 | 1994-01-11 | Nelson Industries, Inc. | Active acoustic attenuation system with power limiting |
| US5345206A (en) * | 1992-11-24 | 1994-09-06 | Bei Electronics, Inc. | Moving coil actuator utilizing flux-focused interleaved magnetic circuit |
| DE4301845C1 (de) * | 1993-01-23 | 1994-03-31 | Freudenberg Carl Fa | Aktiver Schwingungstilger |
| US5332061A (en) * | 1993-03-12 | 1994-07-26 | General Motors Corporation | Active vibration control system for attenuating engine generated vibrations in a vehicle |
| US5456341A (en) * | 1993-04-23 | 1995-10-10 | Moog Inc. | Method and apparatus for actively adjusting and controlling a resonant mass-spring system |
| US5682069A (en) * | 1994-08-30 | 1997-10-28 | Harris Corporation | Concentrically mounted vibration attenuator and method |
| US5526292A (en) * | 1994-11-30 | 1996-06-11 | Lord Corporation | Broadband noise and vibration reduction |
| FR2730288B1 (fr) * | 1995-02-03 | 1997-04-18 | Mesure Et Inf Mei | Dispositifs de reduction de vibrations a commande active constitues de masses mobiles excitees par des electro aimants selon 2 ou 3 axes |
| US5710822A (en) * | 1995-11-07 | 1998-01-20 | Digisonix, Inc. | Frequency selective active adaptive control system |
| US5920173A (en) | 1995-11-15 | 1999-07-06 | Applied Power Inc. | Feedback enhanced adaptively tuned vibration absorber |
| GB9523651D0 (en) * | 1995-11-18 | 1996-01-17 | Gkn Westland Helicopters Ltd | Helicopter and method for reucing vibration of a helicopter fuselage |
| FR2749901B1 (fr) * | 1996-06-12 | 2000-12-08 | Eurocopter France | Dispositif pour reduire les vibrations engendrees par un rotor de sustentation d'un aeronef a voilure tournante |
| US5883478A (en) * | 1996-10-11 | 1999-03-16 | Ts Engineering Inc. | Apparatus and method for controlling vibrating equipment |
| US6009985A (en) * | 1997-02-10 | 2000-01-04 | Lord Corporation | Efficient multi-directional active vibration absorber assembly |
| US6094601A (en) * | 1997-10-01 | 2000-07-25 | Digisonix, Inc. | Adaptive control system with efficiently constrained adaptation |
| US5954169A (en) * | 1997-10-24 | 1999-09-21 | Lord Corporation | Adaptive tuned vibration absorber, system utilizing same and method of controlling vibration therewith |
| JP3564974B2 (ja) * | 1997-11-07 | 2004-09-15 | 東海ゴム工業株式会社 | 周期性信号の適応制御方法 |
| FR2770825B1 (fr) * | 1997-11-13 | 1999-12-31 | Eurocopter France | Dispositif pour reduire les vibrations dans la cabine d'un aeronef a voilure tournante, notamment un helicoptere |
| US5896076A (en) * | 1997-12-29 | 1999-04-20 | Motran Ind Inc | Force actuator with dual magnetic operation |
| US6006875A (en) * | 1998-03-31 | 1999-12-28 | Motran Industries Inc | Electrically-tunable vibration absorbers |
| US6059274A (en) * | 1998-05-04 | 2000-05-09 | Gte Internetworking Incorporated | Vibration reduction system using impedance regulated active mounts and method for reducing vibration |
| DE69939796D1 (de) * | 1998-07-16 | 2008-12-11 | Matsushita Electric Ind Co Ltd | Lärmkontrolleanordnung |
| FR2784350B1 (fr) * | 1998-10-12 | 2000-12-08 | Eurocopter France | Dispositif pour reduire des vibrations engendrees sur la structure d'un aeronef a voilure tournante |
| EP1210529A2 (en) | 1999-02-22 | 2002-06-05 | Cooper Tire & Rubber Company | Apparatus for vibrations attenuation using electronic and electromagnetic actuation |
| US6355994B1 (en) * | 1999-11-05 | 2002-03-12 | Multibeam Systems, Inc. | Precision stage |
| US6467723B1 (en) * | 2000-10-10 | 2002-10-22 | Lord Corporation | Active vibration control system for helicopter with improved actustor placement |
| US6512435B2 (en) * | 2001-04-25 | 2003-01-28 | Charles Willard | Bistable electro-magnetic mechanical actuator |
| US6639496B1 (en) * | 2001-04-25 | 2003-10-28 | Van Namen Frederik T. | Bistable long-stroke electro-magnetic mechanical actuator |
| US7288861B1 (en) * | 2004-03-06 | 2007-10-30 | Motran Industries Inc. | Inertial actuator with multiple flexure stacks |
| EP1766261B1 (en) * | 2004-06-10 | 2012-02-08 | Lord Corporation | A method and system for controlling helicopter vibrations |
| US7550880B1 (en) * | 2006-04-12 | 2009-06-23 | Motran Industries Inc | Folded spring flexure suspension for linearly actuated devices |
-
2005
- 2005-06-10 EP EP05856808A patent/EP1766261B1/en active Active
- 2005-06-10 CN CNB2005800191027A patent/CN100535473C/zh not_active Expired - Fee Related
- 2005-06-10 US US11/149,514 patent/US7370829B2/en active Active
- 2005-06-10 WO PCT/US2005/020580 patent/WO2006083295A1/en not_active Application Discontinuation
-
2007
- 2007-11-19 US US11/942,381 patent/US7686246B2/en active Active
-
2009
- 2009-12-17 US US12/640,149 patent/US8272592B2/en active Active
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102056798B (zh) * | 2008-04-07 | 2014-05-28 | 洛德公司 | 用于消除振动的直升机轮轴安装振动控制器和圆周力产生系统 |
| CN102890464A (zh) * | 2012-09-29 | 2013-01-23 | 西安电子科技大学 | 大跨度悬臂桁架的提升及振动运动控制方法 |
| CN102890464B (zh) * | 2012-09-29 | 2014-11-12 | 西安电子科技大学 | 大跨度悬臂桁架的提升及振动运动控制方法 |
| CN104670487A (zh) * | 2013-10-03 | 2015-06-03 | 奥格斯塔韦斯兰股份公司 | 悬停式飞行器旋翼及悬停式飞行器 |
| CN104670487B (zh) * | 2013-10-03 | 2018-10-09 | 奥格斯塔韦斯兰股份公司 | 悬停式飞行器旋翼及悬停式飞行器 |
| CN105257750A (zh) * | 2015-11-19 | 2016-01-20 | 西安空间无线电技术研究所 | 一种多模态电磁吸振器 |
| CN105257750B (zh) * | 2015-11-19 | 2018-10-09 | 西安空间无线电技术研究所 | 一种多模态电磁吸振器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20060054738A1 (en) | 2006-03-16 |
| US7686246B2 (en) | 2010-03-30 |
| US7370829B2 (en) | 2008-05-13 |
| EP1766261B1 (en) | 2012-02-08 |
| WO2006083295A1 (en) | 2006-08-10 |
| US20100090054A1 (en) | 2010-04-15 |
| US8272592B2 (en) | 2012-09-25 |
| US20080179451A1 (en) | 2008-07-31 |
| EP1766261A1 (en) | 2007-03-28 |
| CN100535473C (zh) | 2009-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100535473C (zh) | 控制直升机振动的方法和系统 | |
| US10528140B2 (en) | Haptic feedback system for an electronic device | |
| EP1445132A3 (en) | Electromagnetic suspension system | |
| US20150015117A1 (en) | Multidirectional vibration generator using single vibrator and method for the same | |
| CN104736460A (zh) | 振动式部件输送装置 | |
| CN107005177A (zh) | 用于控制压电电机的方法和设备 | |
| JP2012041107A (ja) | 振動式部品搬送装置 | |
| CN114607733A (zh) | 一种可移动智能结构减振系统及其控制方法 | |
| JP4516053B2 (ja) | 制御装置 | |
| Harris et al. | Introduction to distributed mode loudspeakers (DML) with first-order behavioural modelling | |
| JP2014011843A (ja) | 振動発電装置及び振動発電装置の設計方法 | |
| KR20140094587A (ko) | 진동식 부품 반송 장치 | |
| JP5677784B2 (ja) | 振動式部品搬送装置 | |
| JP5718606B2 (ja) | 振動式部品搬送装置 | |
| JP2015197205A (ja) | 制振装置 | |
| KR102479396B1 (ko) | 스피커 장치에 대한 모드 주파수 시프트 | |
| JP2749533B2 (ja) | 機械およびこの機械に連結された駆動要素を有する装置 | |
| KR20070022703A (ko) | 헬리콥터 진동을 제어하는 방법 및 시스템 | |
| CN117405338A (zh) | 一种基于叠加振动的信息提示系统及方法 | |
| CN108249109A (zh) | 工件输送装置及工件输送装置的调整方法 | |
| JP4211303B2 (ja) | 楕円振動装置の制御装置、楕円振動装置 | |
| RU2335355C2 (ru) | Способ возбуждения и поддержания резонансных механических колебаний и устройство для его осуществления | |
| JPH10274280A (ja) | 振動減衰装置 | |
| JP2021069280A (ja) | 振動発電素子 | |
| JP2005228049A (ja) | 位置決め指令の作成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20090902 Termination date: 20150610 |
|
| EXPY | Termination of patent right or utility model |