-
HINTERGRUND
DER ERFINDUNG
-
VERWANDTE
ANMELDUNGEN
-
Diese
Anmeldung beansprucht die Priorität der vorläufige US-Patentanmeldung mit der Seriennummer
60/363,994 mit dem Titel "Employing Narrow
Bandwidth Notch Filters In Feedback Elimination", die am 13. März 2002 eingereicht wurde und
hiermit durch Bezugnahme eingeschlossen wird.
-
TECHNISCHES
GEBIET
-
Diese
Erfindung bezieht sich allgemein auf eine Rückkoppelung in Audiosystemen.
Insbesondere bezieht sich diese Erfindung auf das Identifizieren
einer Frequenz der Rückkoppelung
und das adaptive Filtern der Rückkoppelungssignale
in einem Audiosystem.
-
STAND DER
TECHNIK
-
Ein
Audiosystem umfasst typischerweise einen Eingangssignalwandler (Mikrofon),
einen Verstärker, einen
Mikroprozessor und eine Tonausgabe (Lautsprecher). Der Eingangssignalwandler
empfängt
Töne und gibt
sie in das System, der Verstärker
verstärkt
die Töne,
der Mikroprozessor führt
eine Signalverarbeitung durch, und die Tonausgabe (der Lautsprecher)
liefert einen Ton an die Nutzer des Systems. Viele Audiosysteme
ermöglichen
einen Duplexbetrieb, bei dem Töne
in das Mikrofon eingegeben werden können, während Töne am Lautsprecher ausgegeben
werden. Wenn jedoch das Mikrophon einen Teil der Töne, die
am Lautsprecher ausgegeben werden, als ein Eingangssignal empfängt, so
wird ein nicht stabiles System mit geschlossener Schleife erzeugt,
was zu einer Audiorückkoppelung
führt.
-
Die
Audiorückkoppelung
zeigt sich als ein oder mehrere Audiorückkoppelungssignale am Lautsprecher,
wo jedes Rückkoppelungssignal
als sinusförmiges
Signal modelliert werden kann (das heißt das oder die Rückkoppelungssignale
zeigen Eigenschaften eines sinusförmigen Signals). Um ein spezielles
Rückkoppelungssignal
zu eliminieren, wandelt der Mikroprozessor das Audiosignal in eine
diskrete (abgetastete) Frequenzspektrumdarstellung um, wie in Form
einer diskreten Fouriertransformation (DFT), einer Spektralschätzung (Spectral
Estimation), von Filterbänken
oder einer ähnlichen
Darstellung. Die Umwandlung des Audiosignals in das abgetastete
Frequenzspektrum ermöglicht
eine allgemeine Identifikation der Frequenz der Rückkoppelungssignals.
Die Frequenzabtastung, die die größte Größe im diskreten Frequenzbereich
aufweist, wird als Frequenz des Rückkoppelungssignals ausgewählt.
-
Ein
Kerbfilter wird bei der identifizierten Frequenz des Rückkoppelungssignals
platziert, um das spezielle Rückkoppelungssignal
zu eliminieren. Durch die Begrenzungen des Mikroprozessors hinsichtlich
der Rechenleistung und des Speicherplatzes ist die Abtastungsauflösung der
abgetasteten Frequenzspektrumsdarstellung jedoch begrenzt. Somit
liefert die ausgewählte
Frequenzabtastung keine genaue Schätzung der tatsächlichen
Frequenz des Rückkoppelungssignals.
Da die ausgewählte
Frequenzabtastung keine genaue Schätzung darstellt, wird ein Kerbfilter
verwendet, das eine signifikant breitere Bandbreite und/oder eine
größere Kerbtiefe
(cut-depth) als sie tatsächlich
für das
Filtern des Rückkoppelungssignals
benötigt
wird, aufweist. Die breitere Bandbreite und/oder die größere Kerbtiefe
sind notwendig, um zu gewährleisten,
dass das Rückkoppelungssignal
vom Ausgangssignal eliminiert wird.
-
Die
Verwendung eines Kerbfilters mit einer breiteren Bandbreite und/oder
einer größeren Kerbtiefe kann
jedoch die Tonqualität
der Töne
am Lautsprecher verschlechtern.
-
Die
Begrenzungen des Mikroprozessors hinsichtlich der Rechenleistung
und des Speicherplatz beschränken
die Anzahl der Kerbfilter, die verwendet werden können, um
Audiorückkoppelungssignale
zu eliminieren. Wenn die Anzahl der Rückkoppelungssignale die Anzahl
der verfügbaren
Kerbfilter überschreitet,
können
einige der Rückkoppelungssignale
durch das System nicht eliminiert werden. Das Misslingen, mindestens einige
der Rückkoppelsignale
zu eliminieren, kann es erforderlich machen, dass die Systemverstärkung reduziert
werden muss, was zu einer verschlechterten Systemleistung führt.
-
ZUSAMMENFASSUNG
-
Diese
Erfindung liefert ein Audiosystem, das die Frequenz eines Rückkoppelungssignals
unter Verwendung einer interpolierenden Rückkoppelungsidentifikation
identifiziert. Die interpolierende Rückkoppelungsidentifikation
kann unter Verwendung einer Frequenzinterpolation auf einem abgetasteten
Frequenzspektrumsignal, das einem Rückkoppelungssignal entspricht,
erzielt werden. Die Rückkoppelungsinterpolation erlaubt
es, die Frequenz des Rückkoppelungssignals
zu identifizieren, insbesondere wenn die Frequenz der Rückkoppelung
zwischen Abtastungen des Frequenzspektrumsignals liegt. Die Interpolation
kann Abtastungen des abgetasteten Frequenzspektrumsignals einschließen, um
ein eindeutiges quadratisches Polynom (oder ein Polynom höherer Ordnung)
zu erzeugen, das der ursprünglichen
Hauptkeule des Rückkoppelungssignals,
das durch das Frequenzspektrumssignal dargestellt wird, ähnelt. Das
Polynom kann für
die Abtastungen unter Verwendung einer Polynominterpolation, einer
rationalen Funktionsinterpolation, einer kubischen Spline-Interpolation
und dergleichen konstruiert werden. Die Spitze des Polynoms und
somit eine Darstellung/Schätzung
der tatsächlichen
Frequenz des Rückkoppelungssignals
kann beispielsweise durch das Setzen der Ableitung der erzeugten
Polynomgleichung zu null bestimmt werden. Ein schmal ausgebildetes
Filter, wie ein Kerbfilter, kann an der bestimmten Frequenz der
Rückkoppelung
platziert werden, um das Rückkoppelungssignal
zu eliminieren oder zu reduzieren. Das Filter reduziert auch die
Wirkung auf die Qualität
des Audiosignals, das durch das Audiosystem geliefert wird.
-
Das
Audiosystem kann adaptiv mehrere Rückkoppelungssignale unter Verwendung
eines einzigen Filters, wie eines Kerbfilters, filtern. Das adaptive
Filtern kann das Identifizieren der Frequenzen der Rückkoppelung
im Audiosignal und das Bestimmen, welche Frequenzen der Rückkoppelungssignale
in einem Frequenzfenster, das aneinander angrenzende Abtastungen
des abgetasteten Frequenzspektrums umfasst, liegen, umfassen. Ein
Filter, wie ein Kerbfilter, ist konfiguriert, um die Frequenzen,
die als innerhalb des Frequenzbereichs, der durch das Frequenzfenster
abgedeckt wird, liegend identifiziert wurden, herauszufiltern, um
somit Kerbfilter für
das Filtern anderer Rückkoppelungssignale
frei zu stellen oder um die Anforderungen an den Speicher und die
Verarbeitungsleistung des Mikroprozessors des Audiosystems zu reduzieren.
Der Frequenzbereich, der durch das Frequenzfenster abgedeckt wird,
kann jede Anzahl von aneinander angrenzenden Abtastungen umfassen,
und er kann vorbestimmt und/oder konfigurierbar sein. Weiterhin
kann der Frequenzbereich, der durch das Frequenzfenster abgedeckt
wird, in Abhängigkeit
vom untersuchten Frequenzband und/oder der Auflösung des abgetasteten Frequenzspektrums
variieren.
-
Andere
Systeme, Verfahren, Merkmale und Vorteile der Erfindung sind oder
werden für
Fachleute bei der Untersuchung der folgenden Figuren und der detaillierten
Beschreibung deutlich. Es ist beabsichtigt, dass alle diese zusätzlichen
Systeme, Verfahren, Merkmale und Vorteile, die in dieser Beschreibung
beinhaltet sind, innerhalb des Umfangs der Erfindung liegen und
durch die folgenden Ansprüche
geschützt
werden.
-
KURZE BESCHREIBUNG
DER ZEICHNUNGEN
-
Die
Erfindung kann unter Bezug auf die folgenden Beschreibungen und
Zeichnungen besser verstanden werden. Die Komponenten in den Figuren
sind nicht notwendigerweise als Maßstab zu verstehen, die Betonung
liegt stattdessen auf der Darstellung der Prinzipien der Erfindung.
Darüber
hinaus bezeichnen in den Figuren gleiche Bezugszahlen entsprechende
Teile in den verschiedenen Ansichten.
-
1 ist
ein Blockdiagramm eines Audiosystems, das Rückkoppelungsidentifikation-
und Reduktionstechniken aufweist.
-
2 ist
ein Flussdiagramm, das den Betrieb des Audiosystems der 1 bei
der Identifizierung der Frequenz eines Rückkoppelungssignals zeigt.
-
3 ist
ein Schaubild, das ein Rückkoppelungssignal
im Zeitbereich zeigt.
-
4 ist
ein Schaubild, das die zeitdiskrete Fouriertransformation des Rückkoppelungssignals
der 3 zeigt.
-
5 ist
ein Schaubild, das eine Zeitfensterfunktion zeigt.
-
6 ist
ein Schaubild, das eine zeitdiskrete Fouriertransformation der Zeitfensterfunktion
der 5 zeigt.
-
7 ist
ein Schaubild, das das Zeitsignal zeigt, das sich aus dem Multiplizieren
des Rückkoppelungssignals
der 3 mit der Fensterfunktion der 5 ergibt.
-
8 ist
ein Schaubild, das die zeitdiskrete Fouriertransformation des der
Fensterfunktion unterworfenen Rückkoppelungssignals
der 7 zeigt.
-
9 ist
ein Schaubild, das die diskrete Fouriertransformation des der Fensterfunktion
unterworfenen Rückkoppelungssignals
der 7 zeigt.
-
10 zeigt
eine Vergrößerung eines
Abschnitts des Schaubilds der 9, die die
Frequenzabschnitte (frequency bins) zeigt, die bei Interpolieren
einer Frequenz eines Rückkoppelungssignals
verwendet werden können.
-
11 ist
ein Schaubild, das die Eigenschaften von Kerbfiltern des Stands
der Technik mit einem Kerbfilter, das unter Verwendung der interpolierenden
Rückkoppelungsidentifikation
konfiguriert ist, vergleicht.
-
12 ist
ein anderes Schaubild, das die Eigenschaften eines Kerbfilters des
Stands der Technik mit einem Kerbfilter, das unter Verwendung der
interpolierenden Rückkoppelungsidentifikation
konfiguriert ist, vergleicht.
-
13 ist
ein Flussdiagramm, das den Betrieb des Audiosystems der 1 für das Durchführen einer adaptiven
Filterung zeigt.
-
14 ist
ein Schaubild, das ein Frequenzfenster zeigt, das einen spezifizierten
Frequenzbereich eines Zeitsignals abdeckt, das beim Durchführen der
adaptiven Filterung verwendet werden kann.
-
15 ist
ein Schaubild, das ein Frequenzfenster zeigt, das einen spezifizierten
Frequenzbereich eines Frequenzsignals abdeckt, das bei der Durchführung der
adaptiven Filterung verwendet werden kann.
-
16 ist
ein Schaubild, das die Eigenschaften zweier Kerbfilter für das Filtern
entsprechender Rückkoppelungssignale
zeigt.
-
17 ist
ein Schaubild, das die Eigenschaften eines Kerbfilters zeigt, das
für das
adaptive Filtern zweier Rückkoppelungssignale
konfiguriert ist.
-
DETAILLIERTE
BESCHREIBUNG DER BEVORZUGTEN AUSFÜHRUNGSFORMEN
-
1 ist
ein Blockdiagramm eines Audiosystems 100, das Rückkoppelungsidentifikationstechniken und
Rückkoppelungsreduktionstechniken
oder Rückkoppelungseliminationstechniken
aufweist. Das Audiosystem verwendet eine interpolierende Rückkoppelungsidentifikation
und kann adaptiv mehrere Rückkoppelungssignale
unter Verwendung eines Kerbfilters filtern. Die interpolierende
Rückkoppelungsidentifikation
liefert eine einzige Schätzung
der Rückkoppelungsfrequenz,
die von mehr als einer Abtastung einer diskreten Frequenzspektrumsdarstellung
eines Rückkoppelungssignals
erhalten wird. Die interpolierende Rückkoppelungsidentifikation
kann das Verwenden einer Frequenzinterpolation durch das Erzeugen
eines Polynoms zweiter oder höherer
Ordnung unter Verwendung einer oder mehrerer Abtastungen der diskreten
Frequenzspektrumsdarstellung einschließen. Eine genaue Darstellung
der tatsächlichen
Frequenz des Rückkoppelungssignals
kann beispielsweise durch das Setzen einer Ableitung des Polynoms
auf null erfolgen. Ein Filter, so wie ein Kerbfilter, kann in Erwiderung
auf die interpolierenden Rückkoppelungsidentifikation
platziert werden, um das Rückkoppelungssignal
mit nur geringer oder gar keiner Wirkung auf die Qualität des Audiosignals, das
durch das Audiosystem geliefert wird, zu reduzieren oder eliminieren.
Die adaptive Filterung umfasst das Konfigurieren eines Filters,
wie eines Kerbfilters, um mehrere Rückkoppelungssignale zu eliminieren,
um es anderen Filtern zu ermöglichen,
andere Rückkoppelungssignale
zu reduzieren oder zu eliminieren. Die adaptive Filterung kann auch
oder alternativ die Anforderungen an den Speicher oder die Rechenleistung
des Prozessors des Audiosystems reduzieren.
-
Das
Audiosystem 100 umfasst eine Audioeingabe, das ist ein
Mikrofon 102, für
das Empfangen eines Audiosignals. Das Mikrofon 102 ist
mit einem Mikroprozessor 104 verbunden, der den Betrieb
des Audiosystems 100 steuern kann. Der Mikroprozessor 104 kann
alle Analog-Digital-Umwandlungen der empfangenen Audiosignale und
eine digitale Signalverarbeitung durchführen. Der Mikroprozessor 104 kann
ferner Digital-Analog-Umwandlungen des Audiosignals, das durch das
Audiosystem 100 geliefert wird, durchführen. Der Mikroprozessor 104 ist
mit einem Verstärker 106 verbunden,
der ein ausgegebenes Audiosignal verstärken kann. Der Verstärker 106 ist
mit einem Lautsprecher 108 verbunden, um das ausgegebene
Audiosignal an einen Nutzer des Audiosystems zu liefern. Während eine
spezielle Konfiguration gezeigt ist, kann das Audiosystem andere
Konfigurationen, die solche mit weniger oder zusätzlichen Komponenten einschließen, aufweisen.
-
2 ist
ein Flussdiagramm eines Verfahrens für das Identifizieren und Reduzieren
und/oder Entfernen eines Rückkoppe lungssignals
in einem Audiosystem. Ein Audiozeitsignal s[n] vom Mikrofon 102 wird
am Mikroprozessor 104 empfangen (Schritt 200).
Die Audiorückkoppelung
kann sich ergeben, wenn ein oder mehrere Teile des Audiosignals,
das vom Lautsprechern 108 geliefert wird, am Mikrofon 102 empfangen
werden, um dadurch ein nicht stabiles System mit geschlossener Schleife
zu verursachen. Der Mikroprozessor 104 wandelt das Audiozeitsignal
in ein abgetastetes Frequenzsignal |S(k)| um (Schritt 202).
Der Mikroprozessor kann Fenstertechniken, wie Rechteck, Hamming,
Bartlett und dergleichen, verwenden, um das Frequenzsignal zu berechnen.
Der Mikroprozessor 104 kann dann die Rückkoppelung detektieren (Schritt 204).
Die Detektion der Rückkoppelung
kann das Durchführen
einer Frequenzspektrumsanalyse, wie einer diskreten Fouriertransformation
(DFT), einer Spektralschätzung,
von Filterbänken
und ähnliche
Techniken, einschließen.
Abtastungen des Frequenzsignals können bei der Interpolation
(Schritt 206) verwendet werden, um die Frequenz des Rückkoppelungssignals
zu bestimmen, und das Rückkoppelungssignal
kann gefiltert werden (Schritt 208). Das Interpolieren
(Schritt 206) und das Filtern (Schritt 208) werden
weiter unten in Bezug auf 10 diskutiert.
-
Die 3 bis 10 zeigen
die Detektion des Rückkoppelungssignals
durch den Mikroprozessor 104. Die 3 zeigt
ein Rückkoppelungszeitsignal
s[n]. Die 4 zeigt ein Frequenzsignal |S(ejw)|, das sich aus der Umwandlung des Rückkoppelungssignals
s[n] in die Frequenzebene unter Verwendung von beispielsweise der
zeitdiskreten Fouriertransformation (DTFT) ergibt. 5 zeigt
eine Zeitfensterfunktion w[n]. 6 zeigt
die DTFT (|W(ejw)| der Fensterfunktion w[n]. 7 zeigt
das Produkt des Rückkoppelungszeitsignals
s[n] mit der Zeitfensterfunktion w[n]. 8 zeigt
das der Fensterfunktion unterworfene Frequenzsignal |Ŝ(ejw)|, das um das Rückkoppelungsfrequenzsignal
|S(ejw)| zentriert ist, das sich aus dem
Durchführen
der DTFT des Produkts von s[n] und w[n] ergibt. 9 zeigt
das abgetastete Frequenzsignal |Ŝ[k]|, das sich aus der DFT
des Produkts von s[n] und w[n] ergibt. Dies ist beispielsweise äquivalent
dem Abtasten des der Fensterfunktion unterworfenen Rückkoppelungsfrequenzsignals
|Ŝ(ejw)| der 8 in gleichmäßig beabstandeten
Frequenzintervallen. 10 zeigt einen Teil des abgetasteten,
der Fensterfunktion unterworfenen Frequenzsignals |S[k]| der 9,
wobei sie insbesondere eine detailliertere Ansicht um eine Hauptkeule
des Rückkoppelungssignals zeigt.
Die Frequenzspektrumssignale, die in den 4, 6 und 8 dargestellt
sind, sind DTFT. Die Frequenzspektrumsignale, die in den 9 und 10 dargestellt
sind, sind DFTs. Andere Frequenzspektrumsanalysetechniken können beim
Umwandeln des Zeitsignals in die Frequenzebene und dem Analysieren
des Frequenzsignals verwendet werden.
-
Im
Flussdiagramm der 2 liefert die Interpolation
(Schritt 206) eine einzelne Darstellung/Schätzung einer
Rückkoppelungsfrequenz,
die aus mehrere Abtastungen der diskreten Frequenzspektrumsdarstellung des
Frequenzsignals bestimmt wurde. Die interpolierende Rückkoppelungsidentifikation
kann unter Verwendung von Frequenzinterpolationstechniken, wie das
beispielsweise in Bezug auf das Schaubild der 10 beschrieben
wird, bestimmt werden, wobei jede Frequenzabtastung einen Frequenzabschnitt
definiert. Die in 10 verwendeten Bezeichnungen
sind wie folgt:
Bestimate = die geschätzte Frequenz
des Rückkoppelungssignals
Bp = Spitzenabschnittsnummer (Maximum)
Bp–1 =
Abschnitt gerade unterhalb (frequenzmäßig) der Spitzenabschnittsnummer
Bp+1 = Abschnitt gerade oberhalb (frequenzmäßig) der
Spitzenabschnittsnummer
Aestimate =
Amplitude bei der geschätzten
Frequenz der Rückkoppelung
Ap = Amplitude des Spitzenabschnitts
Ap–1 =
Amplitude des Abschnitts gerade unterhalb (frequenzmäßig) des
Spitzenabschnitts
Ap+1 = Amplitude
des Abschnitts gerade oberhalb (frequenzmäßig) des Spitzenabschnitts
-
Bestimate ist die geschätzte Frequenz des Rückkoppelungssignals,
die unter Verwendung der unten beschriebenen Interpolationstechniken
bestimmt werden kann. Idealerweise wird die Frequenz Bestimate mit
der tatsächlichen
Frequenz des Rückkoppelungssignals
zusammenfallen. In jedem Fall ist die Frequenz Bestimate typischerweise
eine genauere Schätzung
der tatsächlichen
Frequenz des Rückkoppelungssignals
als die Frequenz Bp, die von Systemen des
Stands der Technik gewählt
wurde.
-
Die
interpolierende Rückkoppelungsidentifikation,
wie die Frequenzinterpolation, liefert eine genauere Schätzung der
tatsächlichen
Frequenz der Rückkoppelung
und kann unter Verwendungen von Abtastungen von DFT |S[k]| bestimmt
werden. Unter Verwendung von Abtastungen des DFT-Signals |S[k]|
kann ein eindeutiges quadratisches Polynom (oder ein Polynom höherer Ordnung)
erzeugt werden, das der ursprünglichen Hauptkeule
des DTFT, die das Rückkoppelungssignal
darstellt, ähnelt.
Ein Polynom kann aus den Abtastpunkten der DFT |S[k]| rekonstruiert
werden. Ein Interpolationspolynom für den Grad N–1 ist als
Lagrange-Polynom dargestellt:
-
Andere
Interpolationspolynomtechniken können
verwendet werden, wobei sie die polynomiale Interpolation, die rationale
Funktionsinterpolation, die kubische Spline-Interpolation und dergleichen
einschließen.
-
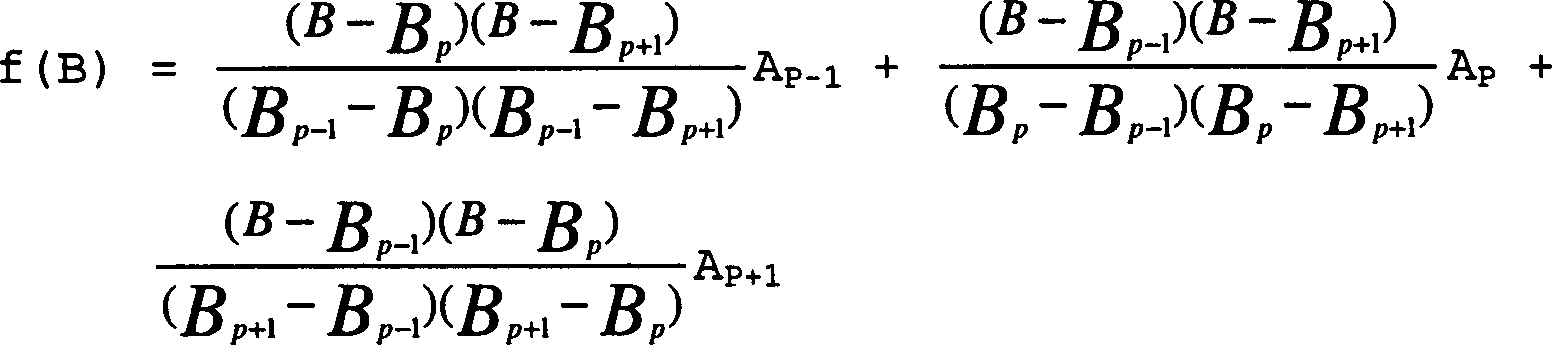
Das
Anwenden der Lagrange-Polynomgleichung auf die Frequenzinterpolation
(hier für
ein quadratisches Polynom oder Polynom zweiter Ordnung) führt zu einer
Rückkoppelungsfrequenzgleichung
f(B) von
-
Eine
Spitze der quadratische Kurve und somit eine Schätzung/Darstellung der Frequenz
des Rückkoppelungssignals
kann durch eine Auflösung
nach einem Maximum von f(B) bestimmt werden. Das Auflösen nach
dem Maximum kann beispielsweise durch das Ableiten von f(B) und
das Setzen der Ableitung auf null erfolgen, was zur geschätzten Rückkoppelungsfrequenz
B
estimate führt
-
Der
Pol der quadratischen Kurve liefert eine genauere Darstellung der
Frequenz des Rückkoppelungssignals
als die Frequenz Bp der Spitze allein. Wo
vor der Interpolation bekannt ist, dass Ap größer als
Ap+1 und Ap–1 ist,
kann bestimmt werden, dass das interpolierte Polynom an diesem Ort
kein Minimum sondern nur ein Maximum aufweist. Somit führt das
Hernehmen der Ableitung des Interpolationspolynoms und das Setzen
der Ableitung auf null, zum Maximum und somit zur genauere Darstellung
der Frequenz des Rückkoppelungssignals
als die Frequenz Bp. Wenn jedoch vor der
Interpolation nicht bekannt ist, dass Ap größer als
Ap+1 und Ap–1 ist,
kann es notwendig sein, zu bestimmen, dass die Frequenz Bestimate ein Maximum und kein Minimum der quadratischen
Gleichung darstellt.
-
Um
zu bestimmen, dass die Frequenz bei Bestimate ein
Maximum (und kein Minimum) darstellt, kann ein Wert Aestimate durch
den Mikroprozessor 104 unter Verwendung der obigen Gleichung
für f(B)
berechnet werden, die die Amplitude des Rückkoppelungssignals bei der
interpolierten Frequenz Bestimate darstellt.
Aestimate kann mit den Werten Ap+1 und
Ap–1,
die Amplituden des Rückkoppelungssignals
an den entsprechenden Frequenzen Bp und
Bp+1 darstellen, verglichen werden, um zu
gewährleisten,
dass Aestimate die höchste Amplitude aufweist.
-
Der
Schritt der Interpolation 206 der 2 liefert
eine genauere Schätzung
der tatsächlichen
Frequenz des Rückkoppelungssignals.
Unter Verwendung der Frequenzschätzung
Bestimate kann ein Filter für das Filtern
der Rückkoppelung
des Audiosignals konfiguriert werden (Schritt 208). Das
Filter kann ein Bandbreiten-Kerbfilter sein. Es können andere
Filter verwendet werden. Da eine genaue Schätzung für die Frequenz des Rückkoppelungssignals
unter Verwendung der Frequenzinterpolation identifiziert wurde,
kann das Bandbreiten-Kerbfilter durch den Mikroprozessor 104 als
ein Kerbfilter mit schmaler Bandbreite konfiguriert werden (das
heißt
es können
Koeffizienten, die den Gütefaktor
und/oder die Verstärkung/Kerbtiefe
einschließen,
dafür berechnet
werden), das die Frequenz des Rückkoppelungssignals
herausfiltern kann. Der Mikroprozessor 104 kann auch die
Bandbreite und/oder eine Kerbtiefe des Kerbfilters minimieren. Das
konfigurierte Filter kann dann an der Frequenz Bestimate platziert
werden (das heißt,
es wird mit einer Mittenfrequenz von Bestimate ausgestaltet).
Eine solche Filterung kann, wie das ein Fachmann erkennen wird,
unter Verwendung von Filtertechniken, wie Tech niken der Finiten
Impulsantwort (FIR) und der Infiniten Impulsantwort oder irgend
einer anderen Filtertechnik, die für das Herausfiltern des Rückkoppelungssignals
ausreichend ist, geschehen. Somit ermöglicht die Identifizierung
der Frequenz des Rückkoppelungssignals
unter Verwendung einer interpolierenden Rückkoppelungsidentifikation
eine genaue Platzierung des Kerbfilters an der Frequenz des Rückkoppelungssignals,
und es ist somit für
das Herausfiltern des Rückkoppelungssignals
genauer konfiguriert.
-
10 zeigt
ein Beispiel der Interpolation durch das Erzeugen eines Polynoms,
das die ursprüngliche Hauptkeule
des Frequenzspektrums modelliert, wobei die Interpolation ausgeführt wird
durch das Bestimmen eines Maximums des Polynoms mit Hilfe der Ableitung.
Ein Fachmann wird erkennen, dass jede Interpolationstechnik verwendet
werden kann, um die Rückkoppelungsfrequenz
zu identifizieren. Beispielsweise können zusätzliche Frequenzabschnitte
zwischen Abtastungen des Abtastfrequenzsignals, das in 10 gezeigt
ist, eingefügt
werden, wobei jeder eingefügte
Abschnitt einen Energiewert von null aufweist. Das abgetastete Frequenzsignal
kann dann durch ein Tiefpassfilter hindurchgeführt werden, was zu einem interpolierten
abgetasteten Spektrum führt.
Unter Verwendung des interpolierten abgetasteten Spektrums kann
man ein Maximum des gefilterten Frequenzspektrums bestimmen, um
eine genauere Schätzung
der Rückkoppelungssignalfrequenz
zu erhalten.
-
Die 11 und 12 zeigen
Schaubilder, die die Eigenschaften von Kerbfiltern des Stands der
Technik mit Kerbfiltern, die gemäß der interpolierenden
Rückkoppelungsidentifikation
konfiguriert sind, vergleichen. Der abgetastete Frequenzabschnitt,
der eine maximale Amplitude Bp in 10 aufweist,
kann 994 Hz in den 11 und 12 entsprechen.
Eine genauere Darstellung der Frequenz des Rückkoppelungssignals, Bestimate in 10, kann
den 1000 Hz in den 11 und 12 entsprechen.
Die abgetasteten Frequenzabschnitte und die Frequenz des Rückkoppelungssignals
können
andere Frequenzen aufweisen. Wie in den 11 und 12 gezeigt
ist, führen
Rückkoppelungsidentifikationstechniken
des Stands der Technik zu einem Kerbfilter, das konfiguriert ist,
um die Frequenzen bei der maximalen Abschnittsfrequenz 994 Hz heraus
zu filtern, und sie müssen
eine erhöhte
Bandbreite aufweisen, wie das durch die Linie 1100 in 11 gezeigt
ist, oder eine erhöhte
Kerbtiefe, wie das durch die Linie 1200 der 12 gezeigt
ist, um zu gewährleisten,
dass die Verstärkung
(G) des Filters an der tatsächlichen
Frequenz der Rückkoppelung
ausreichend ist, um das Rückkoppelungssignal
zu filtern.
-
Im
Gegensatz dazu liefern Rückkoppelungsidentifikationstechniken,
die eine interpolierende Rückkoppelungsidentifikation
verwenden, eine genauere Darstellung (hier ungefähr 1000 Hz) der tatsächlichen
Frequenz der Rückkoppelung.
Somit kann ein Kerbfilter, das die bei 1105 und 1205 der 11 und 12 gezeigten
Eigenschaften aufweist, bei der genaueren Schätzung der tatsächlichen
Frequenz des Rückkoppelungssignals
platziert werden. Da das Filter genauer platziert wird, so kann
es schmäler
gemacht werden (das heißt
eine reduzierte Bandbreite und/oder Kerbtiefe aufweisen), während es
gewährleistet,
dass die Verstärkung
bei der Frequenz des Rückkoppelungssignals
ausreichend ist, um das Rückkoppelungssignal
zu eliminieren oder zu reduzieren, und dies nur eine geringe oder
gar keine Wirkung auf die Qualität
des Signals, das am Lautsprecher 108 geliefert wird, hat
oder in jedem Fall eine geringere Wirkung auf die Audioqualität als bei Kerbfiltern,
die unter Verwendung von Rückkoppelungsidentifikationstechniken
des Stands der Technik konfiguriert wurden, zeigt.
-
13 ist
ein Flussdiagramm eines Verfahrens für das Liefern einer adaptiven
Filterung der Rückkoppelung
in einem Au diosystem. Frequenzen einer Vielzahl von Rückkoppelungssignalen
werden durch den Mikroprozessor 104 identifiziert/geschätzt (Schritt 1300).
Solche Frequenzen können,
wie das oben beschreiben wurde, unter Verwendung der interpolierenden
Rückkoppelungsidentifikation
oder auf irgend andere Weise identifiziert werden. Der Mikroprozessor 104 bestimmt
im Schritt 1302, ob die Frequenzen der Rückkoppelungssignale
innerhalb des Frequenzfensters, das einen spezifizierten Frequenzbereich
abdeckt, liegen. Der Frequenzbereich, der durch das Frequenzfenster
abgedeckt wird, kann vorbestimmt sein und/oder er kann konfigurierbar
sein, und er kann in Abhängigkeit
vom untersuchten Frequenzband variieren. Der spezifizierte Frequenzbereich,
der durch das Frequenzfenster abgedeckt wird, wird weiter unten
in Bezug auf die 14 und 15 diskutiert.
-
Der
Mikroprozessor 104 filtert im Schritt 1304 das
Rückkoppelungssignal
innerhalb des Frequenzbereichs, der durch das Frequenzfenster abgedeckt
wird. Der Mikroprozessor 104 konfiguriert ein Filter für das Herausfiltern
aller Frequenzen eines Rückkoppelungssignals,
von denen bestimmt wurde, dass sie innerhalb des Frequenzbereichs
liegen. Das Filter kann ein Kerbfilter oder ein anderer Typ von
Filter sein. Der Mikroprozessor kann Filterkoeffizienten, wie den
Gütefaktor,
die Kerbtiefe und eine Mittenfrequenz, für den Filter bestimmen.
-
14 ist
ein Schaubild, das ein Frequenzfenster, das einen spezifizierten
Frequenzbereich für
Darstellung der Rückkoppelungssignale
auf der Zeitebene abdeckt, darstellt, wobei es bei der Bereitstellung
der adaptiven Filterung, die oben unter Bezug auf 13 diskutiert
wurde, verwendet werden kann. Wie in 14 gezeigt
ist, kann ein Frequenzfenster, dass allgemein bei 1405 dargestellt
ist, einen spezifizierten Frequenzbereich, beispielsweise αf, abdecken.
Wenn zwei Rückkoppelungsfrequenzen,
beispielsweise die Rückkoppelungsfre quenz
f1 und die Rückkoppelungsfrequenz
f2 innerhalb des Frequenzfensters 1405 liegen, kann im Schritt 1302 bestimmt
werden, dass die adaptive Filterung verwendet wird, um ein einzelnes
Filter zu konfigurieren, um die Rückkoppelungsfrequenzen heraus
zu filtern.
-
Um
zu bestimmen, ob die Rückkoppelungsfrequenzen
innerhalb des Frequenzfensters 1405 liegen, kann eine Frequenzdifferenz Δf zwischen
den Rückkoppelungsfrequenzen,
beispielsweise durch das Subtrahieren einer Frequenz von der anderen,
bestimmt werden. Beispielsweise kann, wie das in 14 gezeigt
ist, ΔF
durch das Subtrahieren der Frequenz f1, die eine erste Frequenz
darstellt, an der eine Rückkoppelung
vorhanden ist, von f2, die eine zweite Frequenz darstellt, an der
eine Rückkoppelung
vorhanden ist, bestimmt werden. Wenn der Wert ΔF kleiner als αf ist, und
somit der Frequenzbereich durch das Frequenzfenster 1405 abgedeckt
wird, kann bestimmt werden, dass die Rückkoppelung, die an den Frequenzen
f1 und f2 vorhanden ist, durch ein einzelnes Filter adaptiv gefiltert
werden kann.
-
Ein
Filter kann beispielsweise durch den Mikroprozessor 104 an
der Mittenfrequenz fc innerhalb des Frequenzfensters 1405,
das einen ausreichenden Gütefaktor
und/oder eine ausreichende Kerbtiefe aufweist, um die Rückkoppelung
an den Frequenzen f1 und f2 heraus zu filtern, konfiguriert werden.
-
Zugleich
oder danach kann, wenn ein Rückkoppelungssignal
bei der Frequenz f3 identifiziert wird, wie das beispielsweise in 14 gezeigt
ist, der Mikroprozessor 104 bestimmen, ob die Frequenzdifferenz Δf zwischen
f3 und fc kleiner als der Frequenzbereich, der durch das Frequenzfenster 1405 abgedeckt
wird, ist. Wenn bestimmt wird, dass die neu berechnete Differenz Δf kleiner
als αf ist,
kann der Mikroprozessor 104 bestimmen, dass die Rückkoppelung,
die bei f3 identifiziert wurde, unter Verwendung eines Filters bei
fc adaptiv gefiltert werden kann, und kann somit das Filter zentriert
bei fc neu konfigurieren (das heißt den Gütefaktor, die Kerbtiefe und/oder
fc neu festlegen), um die Rückkoppelung,
die bei den Frequenzen f1, f2 und f3 identifiziert wurde, heraus
zu filtern.
-
Alternativ
kann der Mikroprozessor 104 statt dem Bestimmen der Frequenzdifferenz
zwischen f3 und fc eine Frequenzdifferenz Δf zwischen f3 und f1 bestimmen,
um sie mit dem Frequenzbereich αf
des Frequenzfensters 1405 zu vergleichen, um zu bestimmen,
ob die Rückkoppelungsfrequenzen
f1, f2 und f3 adaptiv durch ein einzelnes Filter gefiltert werden
können.
Wenn zusätzliche
Rückkoppelungsfrequenzen
gleichzeitig und/oder nachfolgend identifiziert werden, kann der
Mikroprozessor 104 bestimmen, ob zusätzliche Filter verwendet werden
oder ob existierende Filter verwendet werden, um die gleichzeitig
oder nacheinander identifizierten Frequenzen der Rückkoppelung
abzudecken.
-
Zusätzlich kann
der Mikroprozessor 104 weiter Algorithmen verwenden, die
die Anzahl der Filter, die notwendig sind, um die identifizierten
Rückkoppelungsfrequenzen
heraus zu filtern, minimieren. In 14 kann
die Frequenz der Rückkoppelungsfrequenz
f1 1000 Hz betragen, wohingegen die Rückkoppelungsfrequenz f2 1012
Hz betragen kann, und die Rückkoppelungsfrequenz
f3 bei 1024 Hz liegen kann. Der spezifizierte Frequenzbereich αf des Frequenzfensters 1405 kann
jeden Wert, beispielsweise 6 Hz, 12 Hz, 20 Hz, 100 Hz oder irgend
einen anderen Wert, annehmen. Der spezifizierte Frequenzbereich αf kann über dem
Frequenzspektrum als eine Funktion der Frequenz der speziellen zu
untersuchenden Rückkoppelungsfrequenzen variieren.
Beispielsweise kann der Frequenzbereich αf logarithmisch zunehmen, wenn
die spezielle Frequenz, die auf eine Rückkoppelung hin untersucht
wird, zunimmt. Somit kann αf
bei niedrigeren Frequenzen einen kleineren Wert als bei höheren Frequenzen
aufweisen. Zusätzlich
kann es sein, dass der Wert von αf,
der das Frequenzfenster 1405 definiert, durch einen Nutzer
des Systems 100 konfigurierbar ist.
-
Das
Schaubild der 14 beschreibt, wie der Bestimmungsschritt 1302 für Rückkoppelungssignale, die
im Zeitbereich dargestellt sind, vorgenommen werden kann. Der Bestimmungsschritt 1310 kann
für identifizierte
Rückkoppelungssignale
im Frequenzbereich ähnlich
ausgeführt
werden, beispielsweise so wie das in Bezug auf das Schaubild der 15 beschrieben
wird.
-
15 ist
ein Schaubild, das ein Frequenzfenster zeigt, das einen spezifizierten
Frequenzbereich für eine
Frequenzdarstellung von Rückkoppelungssignalen
abdeckt, das für
die oben diskutierte adaptive Filterung verwendet werden kann. Ein
Frequenzfenster 1505 ist gezeigt, wie es einen spezifizierten
Frequenzbereich αB,
der durch eine spezielle Anzahl von Frequenzabschnitten (das sind
Frequenzabtastungen) dargestellt wird, abdeckt. Um im Schritt 1302 zu
bestimmen, ob die Rückkoppelungsfrequenzen
innerhalb des Frequenzfensters 1505 liegen, kann eine Frequenzdifferenz ΔB, die hier
als Anzahl von Frequenzabschnitten dargestellt ist, zwischen Rückkoppelungsfrequenzabschnitten,
beispielsweise durch das Subtrahieren eines Rückkoppelungsfrequenzabschnitts
vom anderen, bestimmt werden. Wie in 15 gezeigt
ist, kann ΔB
durch das Subtrahieren des Frequenzabschnitts #B328, der eine erste
Frequenz, an der eine Rückkoppelung
vorhanden ist, darstellt, vom Frequenzabschnitt #B326, der eine
zweite Frequenz, an der eine Rückkoppelung vorhanden
ist, bestimmt werden. Wenn der Wert ΔB kleiner als αB und somit
kleiner als der Frequenzbereich, der durch das Frequenzfenster 1505 abgedeckt
wird, ist, kann bestimmt werden, dass die Rückkoppelung, die an den Frequenzabschnitten
B328 und B326 vorhanden ist, durch ein einziges Filter adaptiv gefiltert
werden kann.
-
Ein
Filter kann beispielsweise durch den Mikroprozessor 104 an
der Mittenfrequenz fc innerhalb des Frequenzfensters 1505 mit
einem ausreichenden Gütefaktor
und/oder einer ausreichenden Kerbtiefe, um die Rückkoppelung an den Frequenzabschnitten
B326 und B328 heraus zu filtern, konfiguriert werden.
-
Gleichzeitig
oder nachfolgend kann der Mikroprozessor 104, wenn ein
Rückkoppelungssignal
an einem Frequenzabschnitt #B333, wie das beispielsweise in 15 gezeigt
ist, identifiziert wird, bestimmen, ob die Frequenzdifferenz ΔB zwischen
dem Frequenzabschnitt #B333 und fc kleiner als der spezifizierte
Frequenzbereich αB,
der durch das Frequenzfenster 1505 abgedeckt wird, ist.
Wenn bestimmt wird, dass das neu berechnete ΔB kleiner als αB ist, so
kann der Mikroprozessor 104 bestimmen, dass die Rückkoppelung,
die beim Frequenzabschnitt #B333 identifiziert wurde, unter Verwendung
des Filters bei fc adaptiv gefiltert werden kann. Der Mikroprozessor 104 kann
das Filter, das an der Mittenfrequenz fc zentriert ist, neu konfigurieren
(das heißt,
den Gütefaktor,
die Kerbtiefe und/oder fc neu konfigurieren), um die Rückkoppelung,
die bei den Frequenzen, die durch die Frequenzabschnitte 326, 328 und 333 dargestellt
werden, identifiziert wurde, heraus zu filtern. In 15 ist
die Mittenfrequenz fc beispielsweise im Abschnitt #B327 gezeigt.
-
Ähnlich wie
das oben in Bezug auf 14 diskutiert wurde, kann der
Mikroprozessor statt der Bestimmung der Frequenzdifferenz zwischen
dem Abschnitt #B333 und fc eine Frequenzdifferenz ΔB zwischen
den Abschnitten B333 und B326 bestimmen. Diese Frequenzdifferenz ΔB kann mit
dem Frequenzbereich αB
des Frequenzfensters 1505 verglichen werden, um zu bestimmen,
ob die Rückkoppelungsfrequenzen,
die in den Abschnitten B326, B328 und B333 dargestellt sind, durch
ein einziges Filter adaptiv gefiltert werden können. Wenn zusätzliche
Rückkoppelungsfrequenzen
gleichzeitig und/oder nachfolgend identifiziert werden, kann der Mikroprozessor 104 bestimmen,
ob zusätzliche
Filter verwendet werden, oder ob existierende Filter verwendet werden,
um die gleichzeitig oder nacheinander identifizierten Frequenzen
der Rückkoppelung
abzudecken.
-
Zusätzlich kann
der Mikroprozessor 104, wie das oben diskutiert wurde,
weiter Algorithmen verwenden, die die Anzahl von Filtern, die notwendig
sind, um die identifizierten Rückkoppelungsfrequenzen
heraus zu filtern, minimieren. Der spezifizierte Frequenzbereich αB des Frequenzfensters 1505 ist
in 15 in Form von 3 Frequenzabschnitten gezeigt,
wobei der Abschnitt #326 eine Frequenzabtastung bei 1000 Hz darstellen kann,
und der Abstand zwischen den Frequenzabtastungen/Abschnitten ungefähr 6 Hz
betragen kann. Ein Fachmann wird jedoch in ähnlicher Weise, wie das oben
in Bezug auf 14 diskutiert wurde, erkennen,
dass αB
jede Anzahl von Frequenzabschnitten, beispielsweise 2, 3, 5 oder
10 Frequenzabschnitte umfassen kann, und dass die Frequenzdifferenz,
die durch αB
dargestellt wird, als eine Funktion der untersuchten Rückkoppelungsfrequenzen
variieren kann. Zusätzlich
kann der wert von αB,
der das Frequenzfenster 1505 definiert, durch einen Nutzer
des Systems 100 konfigurierbar sein.
-
16 zeigt
ein Schaubild, das die Eigenschaften nebeneinander platzierter Kerbfilter,
die vom hier diskutierten adaptiven Filtern profitieren können, zeigt.
Die Rückkoppelung
wurde bei den Frequenzen f1 gleich ungefähr 1000 Hz und f2 gleich ungefähr 1012
Hz identifiziert. Um die Rückkoppelung,
die an diesen Frequenzen identifiziert wurde, zu eliminieren, können Kerbfilter,
die die Kennlinien 1600 und 1605 aufweisen, verwendet
werden. Die Kennlinie 1600 umfasst einen Gütefaktor
gleich ungefähr
128 und eine Kerbtiefe gleich ungefähr –6 dB, um die Rückkoppelung
zu eliminieren oder zu reduzieren. Die Kennlinie 1605 umfasst
einen Gütefaktor
von ungefähr
128 und eine Kerbtiefe von ungefähr –6 dB, um
die Rückkoppelung
zu eliminieren oder zu reduzieren. Unter Verwendung der adaptiven
Filterung kann der Mikroprozessor 104 jedoch bestimmen,
dass die Frequenzdifferenz Δf
zwischen Rückkoppelungsfrequenzen
bei den Frequenzen f1 und f2 innerhalb eines Frequenzbereichs αF, der ein
Frequenzfenster bildet, liegt, wobei αF 15 Hz betragen kann. Der Mikroprozessor 104 kann
ein einziges Kerbfilter konfigurieren, um die Rückkoppelung beider identifizierten Rückkoppelungsfrequenzen
heraus zu filtern.
-
In 17 ist
die Kennlinie eines Kerbfilters, das durch den Mikroprozessor 104 konfiguriert
ist, als 1700 gezeigt. Die Kennlinie zeigt ein Kerbfilter,
das für
eine Mittenfrequenz fc von ungefähr
1006 Hz gestaltet ist, und einen Gütefaktor von ungefähr 45 und
eine Kerbtiefe von ungefähr –6 dB aufweist.
Das Kerbfilter ist zwischen den zwei identifizierten Frequenzen,
hier f1 bei ungefähr
1000 Hz und f2 bei ungefähr
1012 Hz platziert, um die Rückkoppelungssignalfrequenzen
heraus zu filtern. Das Kerbfilter kann an einem Mittelpunkt der Frequenzen
der identifizierten Rückkoppelung,
hier bei ungefähr
1006 Hz, platziert (das ist mit einer Mittenfrequenz gestaltet)
werden. Das Kerbfilter kann an jeder anderen Frequenz zwischen den
identifizierten Rückkoppelungsfrequenzen
oder innerhalb des untersuchten (nicht gezeigten) Frequenzfensters,
das für
das Herausfiltern der identifizierten Rückkoppelung ausreicht, platziert
werden. Wenn bestimmt wird, dass mehr als zwei Frequenzen von Rückkoppelungssignalen
in den Frequenzbereich αF
fallen, kann eine mittlere Frequenz für die bestimmten Frequenzen
der Rückkoppelung
berechnet werden, wobei das Filter dann an der mittleren Frequenz
platziert wird. Alternativ kann eine Mittelpunktfrequenz zwischen
den größten und
niedrigsten Frequenzen, von denen bestimmt wird, dass sie innerhalb
des Frequenzbereichs αf,
der das Frequenzfenster bildet, liegen, für die Platzierung des Kerbfilters
ausgewählt
werden.
-
Somit
kann statt dass zwei oder mehr Kerbfilter erforderlich sind, um
mehrere Rückkoppelungssignale innerhalb
des Frequenzfensters, das durch den Frequenzbereich αf definiert
wird, heraus zu filtern, ein einzelnes Kerbfilter verwendet werden.
Somit können
das oder die anderen Kerbfilter, die im Audiosystem vorhanden sind,
verwendet werden, um die Rückkoppelung
bei anderen Frequenzen zu eliminieren oder zu reduzieren. Statt
dass man zusätzliche
Kerbfilter hat, kann die Reduzierung der Anzahl der Kerbfilter für das Filtern von
Rückkoppelungssignalen
die Anforderungen an den Speicher und/oder die Rechenleistung des
Mikroprozessors 104 reduzieren. Das Filtern kann als Software,
die auf dem Mikroprozessor 104 ausgeführt wird, erzielt werden.
-
Weiterhin
können
mehrere Sätze
von Frequenzen von Rückkoppelungssignalen
durch den Mikroprozessor 104 identifiziert werden, wobei
der Mikroprozessor 104 ein Kerbfilter konfiguriert, um
die Rückkoppelungssignale,
die jedem Satz der Rückkoppelungsfrequenzen
entsprechen, zu filtern.
-
Das
oben diskutierte Audiosystem 100 kann in mobilen Telefonen,
Lautsprecheranlagen, Lauthörtelefonen,
die einen Duplexbetrieb erlauben, oder irgend einem anderen Audiosystem,
das an einer Rückkoppelung
leidet, verwendet werden. Das Mikrofon 102 kann jeder Eingangssignalwandler
sein, der ausreicht, um Audiosignale in das Audiosystem 100 einzugeben.
Der Mikroprozessor 104 kann jeder Mikroprozessor sein, der
die Funktionalität/Verarbeitung
durchführen
kann, die das Umwandeln von Zeitsignalen in abgetastete Frequenzsignale
einschließt.
Weiterhin kann der Mikroprozessor 104, obwohl das nicht
gezeigt ist, ein externes Speichermedium, wie einen Computerspeicher, der
ein Computerprogramm einschließt,
das auf dem Mikroprozessor 104, für das Ausführen einer oder mehrerer der
hier beschriebenen Funktionen ausführbar ist, umfassen oder mit
einem solchen verbunden sein. Das Speichermedium kann ein magnetisches,
ein optisches oder irgend ein anderes Speichermedium, das eine Programmierung
für den
Mikroprozessor 104 liefern kann, sein.
-
Der
Lautsprecher 108 kann jeder Lautsprecher sein, der das
Audioausgangssignal vom Audiosystem 100 liefert. Alternativ
können
hier nicht gezeigte Hardware-Komponenten mit dem Mikroprozessor 104 verbunden
sein, um die Frequenzabtastungsumwandlung durchzuführen, wenn
der Mikroprozessor 104 keine solche Funktion aufweist.
Das Filtern kann unter Verwendung von Software, Hardware oder einer
Kombination vorgenommen werden, und es braucht nicht auf Kerbfiltertechniken
beschränkt
zu sein. Die Software kann auf einem Mikroprozessor ausführbar sein,
um eine digitale Signalverarbeitung oder ähnliches durchzuführen. Die
Hardware kann mit dem Mikroprozessor 104 verbunden sein,
der die Hardware konfigurieren kann, um die gewünschte Verarbeitung und/oder
Filtereigenschaften zu erzielen.
-
Zusätzlich sind
die Werte, die in Bezug auf die Figuren dargestellt und diskutiert
wurden, beispielhaft und stellen keine Beschränkungen beim Rückkoppelungsidentifikations-
und Eliminations- oder Reduktionssystem dar. Weiterhin kann der
Wert für
den Frequenzbereich αf
in Bezug auf die adaptive Filterung jeder Wert sein, der mindestens
einige der hier diskutierten Vorteile erzielt. Der Frequenzbereich αf/αB kann erhöht werden
(größer gemacht
werden), um die Anzahl der Filter, die notwendig sind, um die Rückkoppelung
zu eliminieren, zu reduzieren. Eine geringere Anzahl von Filtern
kann wünschenswert
sein, wo die Anzahl der Rückkoppelungssignale
die Anzahl der Filter, die für
das Filtern der Rückkoppelung
ver fügbar
sind, überschreitet, oder
wo ein Prozessor, der das Filtern durchführt, begrenzte Speicher- und/oder
Verarbeitungsfähigkeiten
aufweist. Das Frequenzfenster, das durch den Frequenzbereich αf/αB definiert
wird, kann unter Berücksichtigung des
speziell verwendeten Audiosystems bestimmt werden, und es kann vom
Nutzer konfigurierbar sein. Solche Überlegungen können die
Auswahl eines Frequenzbereichs, der es ermöglicht, Frequenzen von Rückkoppelungssignalen
zu kombinieren, ohne übermäßig die
Tonqualität,
die durch das Audiosystem geliefert wird, zu beeinträchtigen,
einschließen.
Verschiedene Audiosysteme, die variierende Anforderungen in Bezug
auf die Tonqualität
haben, werden hiermit bereitgestellt. Beispielsweise mag ein Lautsprechersystem
weniger strenge Anforderungen an die Tonqualität haben als ein Audiosystem,
das in einer Konzerthalle oder dergleichen verwendet wird. Ein größerer Frequenzbereichswert αf/αB kann für das erstere
als für
das letztere gewünscht sein,
um die gewünschte
Tonqualität
zu berücksichtigen.
-
Weiterhin
wird ein Fachmann erkennen, dass verschiedene Techniken beim Identifizieren
der Frequenzen der Rückkoppelung
innerhalb des Frequenzbereichs αf/αB verwendet
werden können.
Weiterhin kann der Mikroprozessor verschiedene Techniken beim Gruppieren
identifizierter Rückkoppelungssignalsätze, die
jeweils durch ein einziges Filter gefiltert werden sollen, verwenden,
wobei die Technik die Anzahl der Filter, die für das Filtern der identifizierten
Rückkoppelungssignale
erforderlich sind, minimieren kann.
-
Das
Audiosystem 100 kann sowohl eine interpolierende Rückkoppelungsidentifikation
bei der Identifizierung von Rückkoppelungssignalen
als auch eine adaptive Filterung für die Konfigurierung eines
Filters, um mehrere Frequenzen von Rückkoppelungssignalen auszufiltern,
durchführen.
Das Audiosystem 100 muss die Rückkoppelungsidentifikation
nicht unter Verwendung der interpolierenden Rückkoppelungsidentifikation und/oder
der adaptiven Filterung ausführen.
Stattdessen kann das Audiosystem 100 beim Identifizieren
von Frequenzen der Rückkoppelung
unter Verwendung einer interpolierenden Rückkoppelungsidentifikation
verwendet werden, während
es mit zusätzlicher
Hardware oder Mikroverarbeitungsmöglichkeiten verbunden ist, wobei
diese verwendet werden, um die identifizierten Frequenzen der Rückkoppelung
zu eliminieren oder zu reduzieren. Die Hardware kann eine adaptive
Filterung einschließen.
Weiterhin kann das Audiosystem 100 eine adaptive Filterung
unter Verwendung der Frequenzen der Rückkoppelung, die durch die
externe Hardware oder eine Verarbeitungsmöglichkeit identifiziert wurden,
durchführen
(wobei die Rückkoppelungsfrequenzen,
die unter Verwendung der interpolierenden Rückkoppelungsidentifikation
identifiziert werden, eingeschlossen sein können, wobei dies aber nicht
der Fall sein muss).
-
Die
Darstellungen wurden unter Bezug auf funktionelle Blöcke, die
als Module und Komponenten identifiziert wurden, diskutiert, wobei
sie nicht diskrete Strukturen darstellen sollen und sie weiter kombiniert
oder weiter unterteilt werden können.
Zusätzlich
werden Fachleute erkennen, dass während verschiedene Ausführungsformen
der Erfindung beschrieben wurden, andere Ausführungsformen und Implementierungen,
die innerhalb des Umfangs dieser Erfindung liegen, möglich sind.
Somit ist die Erfindung nur im Licht der angefügten Ansprüche und ihrer Äquivalente
beschränkt.
-
ZUSAMMENFASSUNG
-
Bei
der Erfindung handelt es sich um ein Audiosystem, das Frequenzen
von Rückkoppelungssignalen identifizieren
und diese Rückkoppelungssignale
filtern kann. Es wird eine Frequenzinterpolation auf ein abgetastetes
Frequenzspektrumssignal, das einem Rückkoppelungssignal entspricht,
verwendet, wobei die Frequenzinterpolation es erlaubt, die Frequenz
des Rückkoppelungssignals
zu identifizieren, insbesondere wenn die Frequenz zwischen Abtastungen
des Frequenzspektrumssignals liegt. Die Frequenzidentifikation ermöglicht es,
ein weniger störendes
Filter, wie ein Kerbfilter, an der bestimmten Frequenz der Rückkoppelung
zu platzieren, um das Rückkoppelungssignal
zu eliminieren. Die Platzierung des Kerbfilters reduziert die Wirkung auf
das Audiosignal, das durch das Audiosystem geliefert wird. Das Audiosystem
kann eine adaptive Filterung mehrerer Rückkoppelungssignale unter Verwendung
eines einzigen Filters, wie eines Kerbfilters, liefern. Das einzelne
Kerbfilter wird konfiguriert, um mehr als ein Rückkoppelungssignal zu filtern,
um somit Kerbfilter für das
Filtern anderer Rückkoppelungssignale
frei zu machen oder um die Anforderungen hinsichtlich des Speichers
und der Verarbeitungsleistung des Prozessors des Systems zu reduzieren.