DE60124937T2 - Verfahren und gerät zur verbesserung des fahrerverhaltens in einem fahrzeug - Google Patents
Verfahren und gerät zur verbesserung des fahrerverhaltens in einem fahrzeug Download PDFInfo
- Publication number
- DE60124937T2 DE60124937T2 DE60124937T DE60124937T DE60124937T2 DE 60124937 T2 DE60124937 T2 DE 60124937T2 DE 60124937 T DE60124937 T DE 60124937T DE 60124937 T DE60124937 T DE 60124937T DE 60124937 T2 DE60124937 T2 DE 60124937T2
- Authority
- DE
- Germany
- Prior art keywords
- driver
- vehicle
- data
- condition
- performance assessment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/04—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of land vehicles
- G09B9/052—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of land vehicles characterised by provision for recording or measuring trainee's performance
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0808—Diagnosing performance data
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0816—Indicating performance data, e.g. occurrence of a malfunction
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0841—Registering performance data
- G07C5/085—Registering performance data using electronic data carriers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/16—Devices for psychotechnics; Testing reaction times ; Devices for evaluating the psychological state
- A61B5/18—Devices for psychotechnics; Testing reaction times ; Devices for evaluating the psychological state for vehicle drivers or machine operators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
Description
- Bereich der Erfindung
- Die vorliegende Erfindung betrifft allgemein den Bereich des Fahrzeugbetriebs, und insbesondere ein Verfahren und eine Vorrichtung zur Einschätzung und Verbesserung der Leistung eines Fahrzeugführers.
- Hintergrund der Erfindung
- Die Fülle an Informationen, die die Fahrer erreicht – Telematik, Infotainment, Kollisionswarnung usw. – erfordert einen neuen Ansatz für die Fahrer-Fahrzeug-Schnittstelle. Gegenwärtig werden dem Fahrzeugführer Informationen (beispielsweise Navigationsanweisungen, Mobilfunk- und Emailnachrichten, Verkehrsmeldungen, Infotainmentoptionen, Fahrzeugzustandsüberwachung usw.) asynchron und ungeachtet dessen präsentiert, wie anspruchvoll die Fahrertätigkeit in dem jeweiligen Augenblick sein mag. Beispielsweise könnte eine Kontrolllampe "Motor überprüfen" zur gleichen Zeit zwischen den Instrumenten aufleuchten, zu der der Fahrer eine CD in die Stereoanlage einlegt, während der Bildschirm des Navigationssystems eine bevorstehende Kurve anzeigt und eine verbale Beschreibung dieser Kurve angibt, wenn gleichzeitig ein Anruf auf dem Mobiltelefon im Fahrzeug eingeht und der Fahrer sich im Gespräch mit einem oder mehreren Insassen befindet.
- Menschen besitzen eine begrenzte Fähigkeit, die Umgebung wahrzunehmen, sich Elementen der Umgebung zu widmen, die aufgenommenen Stimuli kognitiv zu verarbeiten, sich entsprechende Bedeutungen aus Wahrnehmungen herauszuziehen und entsprechend jener wahrgenommenen Bedeutungen zu handeln. Zudem gibt es große Abweichungen innerhalb der fahrenden Bevölkerung, sowohl bei angeborenen als auch bei entwickelten Fahrfähigkeiten. Somit neigen Fahrer zu Verwirrung, Ablenkung und Ignoranz, was durch das Feuerwerk an Stimuli, denen sie während der Fahrt ausgesetzt sind, verschlimmert wird. Schulung, Erfahrung und Technologie können verwendet werden, um Verwirrung, Ablenkung und Ignoranz abzuschwächen. Leider gibt es in den Vereinigten Staaten über die Zeit hinaus, zu der die Leute das erste Mal ihre Führerscheine beantragen, nur wenig formelles oder informelles Training in den zum Fahren gehörenden Fähigkeiten. weder haben sich Fahrtrainingsprogramme als besonders effektiv erwiesen, noch wird dieses Training im Verlauf der Fahrerlaufbahn fortgesetzt. Tatsächlich sehen die meisten Menschen, insbesondere in den Vereinigten Staaten, das Fahren eher als ein Recht als als Privileg an. Zudem zeigen Studien, dass die meisten sich selbst als gute Fahrer und "die andere Person" als die Probleme verursachende Person ansehen. Sofern sich nicht und bis sich eine kulturelle oder legale Veränderung vollzieht, die Fahrer dazu anregt, ihre Fahrfähigkeiten verbessern zu wollen, scheint es, dass technische Lösungen zur Verringerung der Verwirrung, Ablenkung und Ignoranz das beste Potenzial zur Verbesserung der Sicherheit im Strassenverkehrssystem besitzen, wobei das System voraussichtlich immer überfüllter und mit wenigen oder gar keinen Erweiterungen der Fahrbahninfrastruktur folglich in Zukunft auch gefährlicher werden wird.
- Um diese und andere Sicherheitsbelange anzusprechen, wurde ein auf einem Zustandsübergangsmodell basierendes integriertes Sicherheitssystem vorgeschlagen. Das zu Grunde liegende Konzept ist ein Gefahrenhierarchiemodell ("hierarchy of threat" model), welches eine Reihe von Zuständen durchläuft, wovon jeder eine auf Informationen von externen Objektdetektoren und im Fahrzeug angebrachten Sensoren basierende Einschätzung der Gefahr einer bevorstehenden Kollision darstellt. Die Zustände sind: "normaler Fahrzustand", "Warnzustand", "Kollisionsvermeidbarer Zustand", "Kollisionsnichtvermeidbarer Zustand" und "Zustand nach Kollision". Sensor-Fusion- und Daten-Fusion-Algorithmen kombinieren Informationen von den Sensoren und ermitteln den Grad, zu dem die Gefahr einer Kollision besteht. Wenn das System die Gefahr einer Kollision feststellt, gibt es Warnungen an den Fahrer aus oder übernimmt in manchen Situationen die Steuerung über das Fahrzeug und leitet ein automatisches Bremsen, einen automatischen Fahrstreifenwechsel oder andere Formen der Fahrzeugkontrolle ein. Dieses System stellt einen Versuch dar, bisher ohne Bezug gewesene Sensorinformationen in einen integrierten Zustand zu bringen, wodurch eine nützliche Beeinflussung bezüglich der Gefahr der Kollision betreffend vorgenommen werden könnte und Warnungen an den Fahrer oder die tatsächliche Kontrolle des Fahrzeugs verwendet werden können, um den aus einer Kollision resultierenden Schaden vollkommen zu vermeiden oder zu verringern.
- Es wurde ausserdem ein System vorgeschlagen, welches eine umfangreiche Überwachung des Fahrzeugs und der Verkehrssituation bietet, um die Ausgabe von Information an den Fahrer zu priorisieren. Das Ziel dieses Systems ist die Verwaltung des Informationstromes an den Fahrer unter Berücksichtigung der Fahrtätigkeit, der Fahrbedingungen und der physischen, kognitiven und Wahrnehmungskapazität des Fahrers. Das bereitgestellte Hilfsmittel ist dafür vorgesehen, den Fokus des Fahrers zu verbessern und die Aufmerksamkeit eines abgelenkten Fahrers zu refokussieren, während sie/er navigiert, manövriert und das Fahrzeug steuert. Die Gesamtsystemstruktur beinhaltet eine Analyse-/Planungsfunktion, welche Eingaben von Sensoren annimmt, ein gespeichertes Repertiore von Fahrsituationen miteinbezieht und Informationen über den Fahrer aufzeichnet. Ausserdem schliesst das System eine Dialogsteuerung zur Verwaltung der Kommunikation mit dem Fahrer ein. Das System überwacht zudem den Fahrer und inte griert den Fahrerzustand in die vom Warn- und Steuersystem getroffenen Entscheidungen.
- Keines der existierenden Systeme führt die Überwachung einer Reihe von Sensordaten aus oder berücksichtigt die Einschätzung der kognitiven Belastung des Fahrers. Solche Systeme beziehen außerdem nicht die Aktivitäten des Fahrers im Cockpit ein, die nicht direkt mit der Fahrtätigkeit verbunden sind, wie beispielsweise das Öffnen und Schliessen von Fenstern, das Einschalten des Radios, usw.. Beispielsweise überwachen die vorhandenen Systeme den Fahrer entweder gar nicht, oder sie überwachen ihn bezüglich des statischen "Modell"-Verhaltens im Gegensatz zu tatsächlichen, dynamischen Fahrerleistungen und/oder -gewohnheiten. Somit liefern diese Systeme weder Informationen in Synchronisation mit der Fahrtätigkeit, noch versuchen sie Ablenkungen zu minimieren und/oder die Aufmerksamkeit des abgelenkten Fahrers auf kritisches Geschehen umzulenken.
- Zudem wurden bisherige Systeme, die versucht haben eine Einschätzung der Fahrerleistung vorzunehmen, auf die Fähigkeit der Fahrstreifeneinhaltung, das heisst, der Einschätzung dessen begrenzt, wie gut der Fahrer die Position des Fahrzeuges im Vergleich zum Fahrstreifenrand einhält, um einen Parameter, der die Fähigkeit des Fahrers zur Fahrstreifeneinhaltung repräsentiert, zu erzeugen. Der Parameter wird in regelmässigen Abständen ermittelt. Fällt er unter ein feststehendes Niveau, wird dem Fahrer eine Warnung, beispielsweise ein Summer oder ein visueller Hinweis, ausgegeben. Dieses System ist darauf beschränkt, dass es nur eine Fahrstreifeneinhaltungs-Einschätzung vornimmt und nicht das bewusste verlassen eines Fahrstreifens, beispielsweise zur Vermeidung einer Gefahr, berücksichtigt. Es ist nicht integriert, um ein Spektrum von Sensoreingaben zu empfangen, und umfasst keine Fahrer-Zustands- und Fahrer-Tätigkeitsdaten. Obwohl eine verminderte Fahrzeugkontrolle durch eine solche Messung erkannt wird, ist es fraglich, ob kognitive oder mentale Ablenkung erkannt werden wird.
- Zudem liefern diese Systeme dem Fahrer weder ein Feedback in Bezug auf seine Gesamtleistung, noch ein Feedback bezüglich der Verbesserung der Fahrerleistung.
- WO 92/03803 (Oberbegriff von Anspruch 1 bzw. Anspruch 15) beschreibt ein System, in dem fahrerverhaltenbezogene Informationen auf einem Führerschein gespeichert werden, um eine Feststellung die Ausführung der Verkehrssicherheit zu ermöglichen.
- WO 00/07150 beschreibt ein System, in dem Fahrzeuginformationen verwendet werden, um den Fahrstil eines Fahrers festzustellen.
- Somit besteht ein Bedürfnis danach, dem Fahrzeugführer Informationen in Synchronisation mit der Fahrtätigkeit zu liefern, um den Fahrerfokus zu verbessern, Ablenkungen zu minimieren und die Fähigkeit des Fahrers, Informationen aufzunehmen und zu verwenden, sicherzustellen. Es besteht ein weiteres Bedürfnis, die Aufmerksamkeit eines abgelenkten Fahrers von unbedeutenden Aktivitäten auf priorisierte Informationen und/oder Aufgaben zu lenken, die notwendig sind, um den sicheren Betrieb eines Fahrzeugs aufrecht zu erhalten. Ein zusätzliches Bedürfnis ist die Bereitstellung eines Feedbacks an den Fahrzeugführer in Bezug auf seine Leistung sowie die Bereitstellung eines zusätzlichen Feedbacks, welches dazu dient, den Fahrer bei der Verbesserung der Leistung zu unterstützen.
- Kurzbeschreibung der Zeichnungen
- Die vorliegende Erfindung wird im Hinblick auf mehrere bevorzugte Ausführungsformen mit Bezug auf die anliegenden Figuren beschrieben, wobei gleiche Bezugszahlen sich durchgehend auf gleiche Elemente beziehen.
-
1 ist ein Blockdiagramm eines Fahrerleistungs-Einschätzungssystem gemäss einer bevorzugten Ausführungsform der vorliegenden Erfindung; -
2 ist ein Blockdiagramm, das eine Schnittstelle des Fahrers mit dem Fahrzeug gemäss einer bevorzugten Ausführungsform der vorliegenden Erfindung erläutert; -
3 ist ein Blockdiagramm, das eine drahtlose Kommunikationsvorrichtung gemäss einer bevorzugten Ausführungsform der vorliegenden Erfindung erläutert; -
4 ist ein Ablaufdiagramm, das die Schritte eines Verfahrens zur Einschätzung der Fahrerleistung gemäss einer bevorzugten Ausführungsform der vorliegenden Erfindung erläutert; -
5 ist ein Ablaufdiagramm, das die Schritte eines Verfahrens zur Verbesserung der Fahrerleistung gemäss einer bevorzugten Ausführungsform der vorliegenden Erfindung erläutert; -
6 ist ein Ablaufdiagramm, das die Schritte eines Verfahrens zum Aufbau einer Reaktion auf Fahrbedingungen gemäss einer bevorzugten Ausführungsform der vorliegenden Erfindung erläutert; -
7 ist ein Ablaufdiagramm, das die Schritte eines Verfahrens zur Bereitstellung eines Feedbacks an den Fahrer gemäss einer bevorzugten Ausführungsform der vorliegenden Erfindung erläutert; und -
8 ist ein Ablaufdiagramm, das die Schritte eines Verfahrens zur Konfiguration eines Betriebszustands einer drahtlosen Kommunikationsvorrichtung gemäss einer bevorzugten Ausführungsform der vorliegenden Erfindung erläutert. - Detaillierte Beschreibung der bevorzugten Ausführungsformen
- Es wird ein System angepasst, um bei einem Fahrer eingehende Informationen einzuschätzen, die Informationen basierend auf einer Vielzahl von Bedingungen, die sich auf den Fahrzeugbetrieb, die Betriebsumgebung, die Fahrertätigkeit und den physischen Zustand des Fahrers beziehen, zu priorisieren und dem Fahrer die relevantesten Informationen für den gegebenen Satz von Bedingungen bereitzustellen. Da diese durchgehend in dieser Beschreibung verwendet werden, werden die Begriffe Fahrzeugführer und Fahrer synonym verwendet. Beide werden verwendet, um auf die Person Bezug zu nehmen, die das Fahrzeug in einer weise führt, die für das Fahrzeug vorgesehen ist.
- In einer weiteren Ausführungsform der vorliegenden Erfindung überwacht das System verschiedene Datenquellen, einschliesslich des Fahrzeugbetriebs, der Betriebsumgebung, der Fahrertätigkeit und des Fahrerzustands, und liefert eine Einschätzung der Fahrerleistung. Dabei kann das System zusätzlich den jeweiligen Fahrer identifizieren, so dass die Einschätzung in Bezug auf Fahrerpräferenzen, frühere Fahrerleistung und -gewohnheiten vorgenommen werden kann.
- Das System kann zudem zur Unterstützung des Fahrers bei der Verbesserung der Fahrleistung angepasst werden. Das System überwacht verschiedene Datenquellen einschliesslich des Fahrzeugbetriebs, der Betriebsumgebung, der Fahrertätigkeit und des Fahrerzustands einen gefahrenen Zeitabschnitt hindurch und zeichnet die Fahrerleistung auf. Die Leistung kann mit bereits vorhandenen guten Gewohnheiten verglichen werden, und es kann dem Fahrer ein Bericht bereitgestellt werden, der angibt, wie die Fahrerleistung im Vergleich zu bereits vorhandenen guten Gewohnheiten und/oder der früheren Fahrleistung und/oder gewohnheitsmässigem Verhalten war. Das System kann die Fahrerleistung über eine Anzahl von Fahrabschnitten aufzeichnen und die Fahrerleistung von Abschnitt zu Abschnitt vergleichen.
- Das System kann ausserdem so angepasst werden, dass es auf eine Einschätzung des Fahrzeugbetriebs, der Betriebsumgebung, der Fahrertätigkeit und des Fahrerzustands reagiert, um eine proble matische Situation in Verbindung mit dem Fahrzeugbetrieb zu vermeiden oder zu entschärfen.
- In
1 umfasst ein System100 ein Sensor-Fusion-Modul102 , ein Antwort-Selektor-Modul104 und einen Aktionserzeuger106 . Das Sensor-Fusion-Modul102 , das Antwort-Selektor-Modul104 und der Aktionserzeuger106 werden in1 zum Zweck der Klarheit und Erörterung als separate Elemente dargestellt. Man kann klar erkennen, dass diese Module als Einzel-Module integriert sein können. Des Weiteren kann man klar erkennen, dass jedes dieser Module oder ein integriertes Einzel-Modul eine geeignete Verarbeitungsvorrichtung wie beispielsweise einen Mikroprozessor, einen digitalen Signalprozessor usw. aufweisen kann, wobei eine oder mehrere Speichervorrichtungen einschliesslich entsprechend konfigurierter Datenstrukturen und Schnittstellen zur Kopplung des Systems100 mit verschiedenen Fahrzeugsensoren und einem Treiber108 umfassen können. - Das Sensor-Fusion-Modul
102 empfängt Daten von einer Vielzahl von Quellen innerhalb des Fahrzeugs und um das Fahrzeug herum. Wie in1 erläutert, empfängt das Sensor-Fusion-Modul102 Fahrzeug-Betriebsdaten112 , Fahrzeug-Umgebungsdaten114 , Fahrer-Zustandsdaten116 und Fahrer-Tätigkeitsdaten118 . - Die Fahrzeug-Betriebsdaten
112 umfassen Daten, die von verschiedenen Fahrzeugsensoren erzeugt werden. Sensoren zur Überwachung des Fahrzeug-Zustands sind überall in einem Kraftfahrzeug vorhanden. Diese Sensoren überwachen eine Vielzahl von Parametern wie beispielsweise Motorbetriebs-Parameter, Fahrzeuggeschwindigkeit, Getriebegeschwindigkeit und Raddrehzahl, Fahrzeugbeschleunigung in drei Achsen, Fahrwerkfunktion, Emissionregelungsfunktion usw. Diese Sensoren können ausserdem Daten im Hinblick auf die Fahrzeugdiagnostik bereitstellen. - Fahrzeug-Umgebungsdaten
114 umfassen Daten in Bezug auf die Umgebung, in der das Fahrzeug betrieben wird, z.B. die Fahrbahnbedingungen, die Verkehrsbedingungen, das Wetter usw.. Die Fahr zeug-Umgebungsdaten114 können von Sensoren bereitgestellt werden, die auch Fahrzeug-Betriebsdaten112 bereitstellen. Beispielsweise können Einschätzungen des Straßenbelags und der Bodenhaftung durch Antiblockier-, Bodenhaftungssteuerung- und Fahrwerksteuerungs-System-Sensoren bereitgestellt werden. Der Fahrzeugstandort kann durch ein fahrzeugeigenes Navigationssystem unter Verwendung der Technologie eines globalen Positionsbestimmungsystems (GPS – global positioning system) angegeben werden. Standortinformationen können durch eine drahtlose Kommunikationsvorrichtung (z.B. ein Mobiltelefon) und ein entsprechendes drahtloses Kommunikationsnetz bereitgestellt werden. Radar-, Laser-, Ultraschall- und Videosysteme können eine Karte von sich in der Nähe des Fahrzeugs befindlichen Objekten und deren Bewegung relativ zum Fahrzeugs bereitstellen. Wetter und Tageszeit können ebenfalls direkt überwacht oder aus indirekten Quellen abgeleitet werden. - Fahrer-Zustandsdaten
116 und Fahrer-Tätigkeitsdaten118 können von verschiedenen Cockpit-Überwachungssystemen bereitgestellt werden. Sitzsensoren und/oder Infrarotsensoren können die Anzahl und die Position von Insassen im Fahrzeug zu erkennen. Boden- und Lenkradsensoren können die Position der Füpße und Hände des Fahrers angeben. Videosensoren oder bildgebende Sensoren können Kopf-, Körper-, Hand- und Fußbewegungen des Fahrers überwachen, und die Betriebszustände und die Verwendung von Infotainment- und Telematiksystemen durch den Fahrer können ebenfalls überwacht werden. - Wie man klar erkennen kann, existieren innerhalb der Fahrzeugumgebung und rund um die Fahrzeugumgebung eine Vielzahl von Datenquellen, welche von dem System
100 verwendet werden können. Verschiedene Datentypen wurden oben beschrieben. Weitere werden in Zusammenhang mit dem Betrieb des Systems100 erläutert. Wiederum andere, auf die hierin nicht spezifisch eingegangen wird, können verwendet werden, ohne sich dabei aus dem Umfang und Geist der Erfindung zu entfernen. Da neue Technologien neue Datentypen und -quellen und neue Informationstypen und -quellen in das Fahrzeug einbeziehen, kann man klar erkennen, dass das System100 angepasst werden kann, um diese zusätzlichen Datenquellen zur Verwaltung zu verwenden, wie dem Fahrer die bestehenden und neue Informationsquellen angezeigt werden. - Mit anderen Worten wird das System
100 alles von technischer Natur überwachen, was der Fahrer im Cockpit des Fahrzeugs berühren oder verwenden könnte, so dass das System100 soviel wie möglich darüber weiss, womit der Fahrer zu jedem gegebenen Zeitpunkt beschäftigt ist. Des Weiteren gestattet die Verwendung von bildgebender oder Videotechnologie, Sitzsensoren und Mikrofonen im Cockpit es dem System100 , den Standort und die Position des Fahrers, den Geräuschpegel und die Anwesenheit von Fahrgästen sowie andere potenzielle Ablenkungsquellen zu ermitteln. Die Radar-, Laser-, Video- und Infrarotsensoren, die im Umkreis des Fahrzeugs im Einsatz sind, überwachen Verkehrs- und Wetterbedingungen, Hindernisse, Fahrbahnmarkierungen usw.. Der gegenwärtige Zustand des Fahrers und die gegenwärtige Fahrleistung werden von direkten Maßnahmen, wie beispielsweise Video, und aus dem Vergleich der gegenwärtigen Leistung mit der früheren Leistung und bekannten guten Leistungen abgeleitet. - Zusätzlich zur Datenbeschaffung aus einer Vielzahl von Quellen ist das System
100 mit dem Fahrzeugführer/Fahrer108 verbunden. Während er das Fahrzeug führt, ist der Fahrer mit einer Anzahl von verschiedenen Tätigkeiten beschäftigt, wie beispielsweise, jedoch sicherlich ohne Einschränkung, mit der Betätigung des Gaspedals oder der Bremsen, dem Drehen des Lenkrades, der Überprüfung der toten Winkel, dem Einstellen des Radios, dem Empfang eines Anrufes auf dem Mobiltelefon, dem Erhalt von Navigations-Informationen, dem Fortführen eines Gespräches mit einem Fahrgast, dem Beruhigen der Kinder auf dem Rücksitz, usw.. Jede der Fahrertätigkeiten, welche in1 zum Zweck der Erörterung als Kästchen110 dargestellt sind, werden über die Sensoren zurück an das Sensor-Fusion-Modul102 geleitet. Ausserdem gibt das System100 , wie nachstehend ausführlicher erläutert wird, dem Fahrer108 Informationen, Tätigkeiten und Aufgaben über den Akti onserzeuger106 aus. Diese "geschlossene" Schleifenoperation kann für eine gegebene Situation fortgesetzt werden bis die Situation geklärt ist. In einem sehr eingeschränkten Beispiel zur Erläuterung des Konzepts könnte eine Meldung "Demnächst Öl wechseln" von dem Antriebs-Verwaltungssystem im Fahrzeug erzeugt werden. Bisher würde diese Meldung zum Aufleuchten einer Leuchte "Motor warten" oder "Motoröl wechseln" auf dem Armaturenbrett des Fahrzeugs führen, sobald das Antriebs-Verwaltungssystem die Meldung erzeugt hat. Die plötzlich zwischen den Instrumenten aufleuchtende Lampe könnte den Fahrer zeitweise ablenken. Wenn der Fahrer sich zum Zeitpunkt des Aufleuchtens der Lampe im Verkehr bewegt oder mit einer anderen Situation beschäftigt ist, die die volle Aufmerksamkeit auf die Fahrtätigkeit erfordert, könnte die Ablenkung eine Gefahr darstellen. Gemäss den bevorzugten Ausführungsformen der Erfindung können die unkritischen Daten, die sich auf den Wechsel des Motoröls beziehen, gespeichert werden, bis die Bedingungen es zulassen, dass dem Fahrer die Information zu einem Zeitpunkt angezeigt wird, an dem es weniger wahrscheinlich ist, dass daraus eine Gefahrensituation resultiert. In diesem Zusammenhang arbeitet das System100 kontinuierlich, indem es Daten aufnimmt und ihre Ausgabe an den Fahrer zeitlich neu festlegt. Des Weiteren schätzt das System100 kontinuierlich die dem Fahrer bereitzustellenden Informationen ein, um zu ermitteln, wann und wie sie dem Fahrer am besten bereitzustellen sind. Dieser Betrieb des Systems100 kann durch ein zusätzliches Beispiel erläutert werden. Eine Benzinmangel-Warnung kann anfänglich eine unkritische Information in Bezug auf die gegenwärtigen Fahrbedingungen sein, könnte jedoch zu einer kritischen Information werden, wenn der Fahrer dabei ist, die letzte Tankstelle zu passieren, während das System100 innerhalb der verbleibenden Reichweite des Fahrzeugs von dem fahrzeugeigenen Navigationssystem informiert wird. - In
2 gibt es eine Vielzahl von Schnittstellen zwischen dem Fahrer108 und dem Fahrzeug und demzufolge zu dem System100 . verschiedene Schnittstellen werden nachstehend erläutert und können eine Fahrer-Identifikation200 , Instrumente und Warnsig nale202 , Fahrzeug-Steuerungen204 , Fahrer-Zustandssensoren206 und Fahrer-Tätigkeitssensoren208 umfassen. - Aufgrund der grossen Unterschiede beim Niveau menschlicher Fähigkeiten, bei der Körpergrösse und persönlichen Vorlieben und Geschmäckern gibt es viele Situationen, in denen es für das System
100 von Nutzen wäre zu "erkennen", wer dabei ist, in das Fahrzeug einzusteigen und/oder es zu fahren. Diesbezüglich kann die Fahrer-Identifikations-Schnittstelle200 als eine persönliche mobile Benutzerschnittstelle (PPUI – personal portable user interface) konfiguriert werden. Eine PPUI kann in vielen Formen vorliegen, erfasst jedoch im Wesentlichen Präferenz-, Leistungs- und Gewohnheits-Daten in Zusammenhang mit einem bestimmten Fahrer. Die PPUI kann auf einer Smartcard codiert oder in das Fahrzeug eingebettet werden, um dann durch ein Fingerabdruck-Lesegerät, ein Spracherkennungssystem, ein optisches Erkennungssystem oder andere derartige Hilfsmittel aktiviert zu werden. - In verschiedenen Ausführungsformen kann die PPUI als ein Sicherheitssystem fungieren, welches den Zugriff auf das Fahrzeug oder die Zündanlage des Fahrzeugs gestattet oder verweigert und unbefugten Personen den Zugriff untersagt oder das Fahrzeug abschaltet, wenn eine unbefugte Person versucht, das Fahrzeug zu fahren. Die PPUI könnte ausserdem die Fahrer-Präferenzen erfassen, da sie mit einer Vielzahl von aktiven Sicherheitseinrichtungen in Zusammenhang steht. Das System
100 wird über die PPUI (Fahrer-Identifikations-Schnittstelle200 ) über die Fahrer-Präferenzen informiert. Beispielsweise kann der Fahrer auswählen, welche Arten von Warnsignalen unter welchen Bedingungen und wie übertragen werden. Zum Beispiel könnte es sein, dass ein Fahrer es bevorzugt, jedes Mal ein Warnsignal zu erhalten, wenn das System100 feststellt, dass ein Abstand zu gering in Bezug auf eine gefahrene Geschwindigkeit ist. Für einen anderen Fahrer könnte ein hoher Grad an Warnsignalen als Belästigung empfunden werden, die zur Nichtbeachtung und/oder der Deaktivierung des Systems100 führt. Gleichermaßen könnte ein Fahrer es wünschen, einen sofortigen Zugriff auf alle eingehenden Mobiltelefonanrufe zu haben, während ein anderer Fahrer es wünschen könnte, dass nur bestimmte Anrufe durchgestellt werden. Die PPUI gestattet es als Teil der Fahrer-Identifikations-Schnittstelle200 jedem Fahrer des Fahrzeugs, vorzeitig Auswahlen zu treffen. - Die PPUI kann zudem in einem Fahrer-Leistungs-Verbesserungs- und/oder einem Fahrbeschränkungs-Durchsetzungs-Gerät arbeiten. Die PPUI kann dazu verwendet werden, die Fahrleistung zu überwachen und an eine Verkehrsbehörde zu berichten. Dies würde es einem gewohnheitsmässigen Verkehrsstraftäter gestatten, Fahrprivilegien in einer vom Gericht überwachten Art und Weise beizubehalten. Die Fahrleistung könnte zur anschliessenden Bewertung aufgezeichnet werden, und ein Verfahren zur Verbesserung der Fahrerleistung wird hierin erläutert. Ausserdem kann die PPUI verwendet werden, um Steuerungen für die Verwendung des Fahrzeuges zu implementieren. Beispielsweise könnte ein Elternteil die Entfernungen und Orte, über die bzw. zu denen ein Fahrzeug gefahren werden kann, oder die Zeiten eines Tages, zu denen ein Fahrzeug von einem Fahreranfänger gefahren werden darf, einschränken. Ein Arbeitgeber kann die Fahrgewohnheiten der Fahrer seines Fuhrparks überwachen.
- Im Betrieb ist das System
100 zur auf empfangenen Daten basierenden Erkennung von "Situationen" und "Bedingungen" programmiert, die während des Fahrzeugbetriebs aufkommen könnten. Das System100 kann so konfiguriert werden, dass es sich in Bezug auf Prioritäten für die Präsentation von Informationen und die Schwellenwerte für die Grade von Meldungen, Warnungen und Alarmen in Betrieb setzt. Die Fahrer-Identifikations-Schnittstelle200 einschliesslich der PPUI bietet dem Fahrer Auswahlmöglichkeiten bezüglich der Prioritäten, Schwellenwerte sowie Schnittstellen und stimmt die Auswahlen auf den passenden Fahrer ab. - Die Instrumenten- und Warnsignal-Schnittstelle
202 wird von dem System100 verwendet, um den Fahrer108 zu informieren, beraten und ihm in den entsprechenden Situationen Hinweise zu geben und ihn zu warnen. Die Instrumenten- und Warnsignal-Schnittstelle202 kann visuelle, akustische, haptische und andere geeignete Anzeigen umfassen. Visuelle Anzeigen können Messinstrumente, beleuchtete Anzeigen, grafische und alphanumerische Bildschirme sein. Diese visuellen Anzeigen können zentral innerhalb des Armaturenbrettes des Fahrzeugs angeordnet sein, über das Fahrzeug verteilt sein, in einem Head-Up-Display konfiguriert sein, in den Rück- und die Aussenspiegel integriert sein oder anderweitig angeordnet sein, um dem Fahrer108 die Informationen vorteilhaft zu vermitteln. Die akustischen Anzeigen können Summer oder Alarmsignale, Sprach- oder andere akustische Warntöne sein. Die haptischen Warnsignale können die Verwendung des Fahrwerk-Regelsystems zur Bereitstellung von simulierten Rüttelstreifen, eines Pedal- oder Lenkrad-Gegendrucks, Sitzbewegungen und dergleichen umfassen. Die Aktivierung jedes einzelnen oder mehrerer Anzeigen oder Warnsignale wird von dem System100 gesteuert, um die zeitliche Koordinierung der Bereitstellung von Informationen für den Fahrer abzustimmen. - Die Fahrzeug-Steuerungs-Schnittstelle
204 umfasst die primären Steuerungen, die vom Fahrer zum Führen des Fahrzeugs verwendet werden. Diese Steuerungen umfassen das Lenkrad, das Gaspedal, das Bremspedal, die Kupplung (wenn vorhanden), den Schalthebel usw.. Diese Steuerungen können geeignete Positions- und/oder Betätigungssensoren einschliessen. Sie können zudem, zumindest im Falle des Gaspedals, des Bremspedals und des Lenkrades, über Einsatz-Geschwindigkeits- und/oder Einsatzkraftsensoren verfügen. Zusätzliche Sensordaten können die Giergeschwindigkeit des Fahrzeugs, die die Fahrzeuggeschwindigkeit und -bodenhaftung angebenede Raddrehzahl, den Reifendruck, die Aktivierung und Geschwindigkeit der Scheibenwischer, die Front- und/oder Heckscheibenheizungs-Aktivierung (zum Beseitigen bzw. Verhindern von beschlagenen Scheiben), die Audiosystem-Lautstärke-Regelung und Gurtverwendungssensoren umfassen. - Die Fahrer-Zustands-Schnittstelle
206 verwendet verschiedene Sensoren zur Ableitung des Fahrerzustands. Beispielsweise nimmt ein aufmerksamer Fahrer fortwährend Lenkkorrekturen vor, um das Fahrzeug in seiner Fahrbahn zu halten. Das System100 sammelt durch die Überwachung der Lenkradsensoren Daten über die Frequenz und die Amplitude der Korrekturen, um daraus zu schliessen, ob der Fahrer beeinträchtigt wurde. Geschwindigkeitssensoren können ebenfalls in ähnlicher Weise abgefragt werden. Video- oder andere bildgebende Sensoren führen durch die Überwachung solcher Kriterien wie Blinzelrate und starrem Blick des Fahrers direkte Messungen des Fahrerzustands durch. - Die Fahrer-Tätigkeits-Schnittstelle
208 verwendet verschiedene Sensoren und bildgebende Technologie zur Ermittlung der Fahrertätigkeit. Das heisst, sie dient zur Feststellung, ob der Fahrer neben dem Führen des Fahrzeugs das Radio oder die Heizungs-, Lüftungs- und Klimaanlagenregler (HVAC – heating, ventilation and air conditioning) einstellt, eine drahtlose Kommunikation beginnt oder empfängt, Navigationsinformationen erhält und dergleichen. Diese Sensoren können Sitzdrucksensoren zur Ermittlung der Insassenanzahl des Fahrzeugs und der Aktivitäten der Insassen sowie Video- oder andere bildgebende Technologien zur Beobachtung der Fahrer-Bewegungen umfassen. - In
1 und wie zuvor erwähnt empfängt das Sensor-Fusion-Modul102 sämtliche der verschiedenen Sensoreingaben einschliesslich jener, die den Fahrzeugzustand, den Fahrerzustand, die Fahrertätigkeit und die Betriebsumgebung (z.B. Wetter, Straßen- und Verkehrsbedingungen) bemessen, und erstellt einen Satz von Bedingungen oder eine Hauptbedingungsliste. Die Bedingungen repräsentieren den gegenwärtigen einzelnen Zustand eines jeden Gegenstandes, den das Sensor-Fusion-Modul102 überwacht. Beispielsweise kann sich die Bedingung der Geschwindigkeit zu einem beliebigen Zeitpunkt in einem der folgenden Zustände befinden: "gestoppt", "langsam", "normal", "schnell" und "zu schnell". Die Zustände werden basierend auf erfassten Schwellenwerten zwischen den Zuständen sowie basierend auf der Entwicklung und bekannten, guten Gewohnheiten erfasst. Das Sensor-Fusion-Modul102 ermittelt in Anbetracht der Hauptbedingungsliste die Fahreraufgaben und -tätigkeiten wie beispielsweise das Einstellen des Radios, das Abhören von Emails oder andere potenziell ablenkende Tätigkeiten, um eine geschätzte kognitive Fahrer-Beanspruchung zu erstellen. Die kognitive Beanspruchung jeder statischen Tätigkeit kann durch kontrollierte Experimente mit Hilfe eines Satzes von Testsubjekten extern ermittelt werden (z.B. könnte das Einstellen des Radios 15,4 Prozent der Aufmerksamkeit eines Fahrers beanspruchen). Die kognitive Gesamtbeanspruchung ergibt sich aus der gewichteten Summe jeder Einzeltätigkeit. Die Gewichtung kann festgelegt sein oder sich ändern, beispielsweise in Anbetracht der Anzahl von gleichzeitig ablaufenden Tätigkeiten. - Die Hauptbedingungsliste und die geschätzte kognitive Fahrer-Beanspruchung werden dann dem Antwort-Selektor-Modul
104 bereitgestellt. Das Antwort-Selektor-Modul beobachtet die Bedingungen, die gegenwärtige Fahrsituation und die kognitive Beanspruchung, um festzustellen, ob ein Problem vorhanden ist und wägt die Schwere des Problems ab. Das Antwort-Selektor-Modul104 berücksichtigt zudem die Fahrer-Präferenzen, um eine der gegenwärtigen Fahrertätigkeit angemessene Antwort zu wählen, und priorisiert die Ausgabe von Warnungen, Warnsignalen und anderen Informationen an den Fahrer. Das Antwort-Selektor-Modul104 kann einen Reflexagenten einbeziehen, der eine Entscheidungsbaum oder Nachschlagetabellen verwendet, um die Zustände mit den gewünschten Aktionen abzugleichen. Alternativ kann ein adaptiver, d.h. lernender, Goal-Seeking-Agent (Zielfindungsagent) verwendet werden. Somit synthetisiert und fasst das Antwort-Selektor-Modul104 Sensordaten zusammen und erstellt eine Antwort auf jede gegebene Zustandsänderung. - In einer möglichen Implementierung kann das Antwort-Selektor-Modul
104 vom Programmierer eingegebene Parameter umfassen, die verwendet werden, um festzustellen, ob eine Zustandsänderung a) ein Problem erzeugt, b) ein Problem löst, c) ein Problem verstärkt, d) eine Fahrertätigkeit auslöst, e) eine Agententätigkeit auslöst, f) eine Fahrer- oder Agententätigkeit abschliesst, g) die Situation verändert oder h) ungefährlich ist. Die geschätzte kognitive Beanspruchung kann verwendet werden, um die Dringlichkeit eines erkannten Problems zu ermitteln oder festzustellen, ob eine Reaktion auf ein Problem durch den Fahrer oder einen Agenten eingeleitet werden sollte. Beispielsweise kann ein eingehender Mobiltelefonanruf an den Fahrer weitergeleitet werden, wenn die geschätzte kognitive Beanspruchung des Fahrers unterhalb eines Schwellenwerts für den Empfang von Mobiltelefonanrufen ist. Übersteigt die kognitive Beanspruchung des Fahrers den Schwellenwert für den Empfang von Mobiltelefonanrufen, kann der Mobiltelefonanruf dann an die Voicemail (Sprachspeicher) (d.h. an eine Agentenvorrichtung) weitergeleitet werden. - Das Antwort-Selektor-Modul
104 aktiviert den Aktionserzeuger106 , um die gewählte Reaktion auszuführen. Der Aktionserzeuger106 kann eine Bibliothek von Aktionen sein, mit der das System zum Zweck des Handelns ausgestattet ist, beispielsweise um einen Mobiltelefonanruf, wie im oben angeführten Beispiel, an die Voicemail weiterzuleiten. Die Bibliothek kann Aktionen zusammen mit Anweisungen aufweisen, die Software-Anweisungen sein können, welche den zugehörigen Prozessor zum Handeln veranlassen, d.h. sämtliche potenzielle Warnungen und Warnsignale zu aktivieren, die dem Fahrer unter Umständen bereitgestellt werden können. - Die Fusion von Daten, einschliesslich der Daten bezüglich des Fahrerzustandes und der Fahrertätigkeit, gestattet es dem System
100 , eine Einschätzung der Fahrerleistung vorzunehmen. Wie bereits erwähnt, ist das System100 durch die Fahrer-Identifikations-Schnittstelle200 in der Lage, einen Fahrer zu identifizieren. Während des Betriebs des Fahrzeuges durch den Fahrer überwacht das System100 verschiedene Aspekte der Fahrerleistung, um einen Fahrerleistungs-Einschätzungswert zu erhalten. - In einer Ausführungsform kann das System
100 die Fähigkeit des Fahrers zur Fahrstreifeneinhaltung überwachen. Informationen über das Überfahren eines Fahrstreifens werden im Hinblick auf den Einsatz von Lenksignalen und darauffolgenden Bewegungen des Fahrzeugs aufgezeichnet, um festzustellen, ob der Fahrstreifenwechsel beabsichtigt oder unbeabsichtigt erfolgte. Außerdem kann das System100 die Richtung eines starren Blicks, Blinzelraten, die Häufigkeit von Streifblicken und ihre Dauer überwachen, um das visuelle Scanverhalten des Fahrers einschliesslich des Gebrauchs von Spiegeln und "Schulterblicken" beim Fahrstreifenwechsel zu ermitteln. Die Informationen können im Vergleich zu bekannten "guten Gewohnheiten" verwendet werden, um die Leistung einzuschätzen und gleichzeitig ein Maßsystem zu entwickeln, welches die üblichen Muster eines Fahrers wiedergibt und somit sowohl als eine Grundlinie zum Vergleich von Änderungen im Fahrverhalten als auch zur Überwachung der Verschlechterung oder Verbesserung der Fahrfähigkeiten verwendet werden kann. - Zusätzliche Informationen, die zur Einschätzung der Fahrerleistung herangezogen werden können, umfassen den Einsatz von Gaspedal und Bremsen. Der Gebrauch des Gaspedals und der Bremsen durch den Fahrer wird aufgezeichnet und erhält einen Zahlenwert. Es kann erneut eine Einschätzung sowohl dessen, wie sanft ein Fahrer bremst und/oder beschleunigt, als auch der Anzahl und Schärfe von Notbremsungen unter Verwendung von Algorithmen zum Vergleich zu "guten Gewohnheiten" und früherer Leistung vorgenommen werden. Gaspedal- und Bremspedal-Daten können außerdem im Zusammenhang mit dem Maßsystem der Abstandseinhaltung, die von dem System
100 überwacht wird, verwendet werden. Dies ermöglicht es dem System100 festzustellen, ob der Fahrer zu lange zögert, im Hinblick auf Hindernisse im Weg des Fahrzeugs zu bremsen. Es ermöglicht ihm festzustellen, ob der Fahrer zur Einhaltung zu kurzer Abstände neigt, wenn Fahrzeug-Geschwindigkeits-Steuervorrichtungen eingesetzt werden. - Zusätzlich zur Einschätzung der Fahrerleistung kann das System
100 zur Unterstützung der Verbesserung der Fahrerleistung angepasst werden. Die Übertragung der Fahrereinschätzung an den Fahrer veranlasst den Fahrer zur Verbesserung seiner Leistung. Das System100 kann ausserdem spezifische Hinweise in Bezug auf die Verbesserung der Fahrerleistung liefern. Beispielsweise kann sich die Überwachung der Fahrerleistung vorübergehend (Aufzeichnung und Vergleich der Fahrerleistung in der Zeit) und räumlich (unter Berücksichtigung der Leistungsunterschiede auf bekannten, regelmässig gefahrenen Strecken) ausweiten, um alle Zeitpunkte einzubeziehen, zu denen ein bestimmter Fahrer das ausgestattete Fahrzeug gefahren hat. Die Fahrereinschätzung, d.h. die Fahrerleistung einschliesslich Hinweisen, Warnungen und Vorschlägen zur verbesserten Leistung, wird dann dem Instrumenten-/Warnsignal-Modul202 zur Weiterleitung an den Fahrer bereitgestellt. Das System100 kann auf eine Bibliothek voraufgezeichneter Nachrichten für den Fahrer zugreifen, und es werden entsprechende Nachrichten, die Berichte und Vorschläge darstellen, ausgewählt. Beispielsweise könnte das System100 erkannt haben, dass der Fahrer vor dem Fahrstreifenwechsel keine Schulterblicke durchgeführt hat, und die Aufmerksamkeit des Fahrers auf jene Tatsache lenken sowie den Grund nennen, dass das ledigliche Werfen eines Blickes auf den Spiegel kein ausreichender Ersatz für einen Schulterblick darstellt. Zusätzliche Nachrichten können Erinnerungen an die Verbesserung der Kraftstoffersparnis aufweisen oder spezifisch einen Bereich der Fahrerleistung identifizieren, der sich im Verlauf der Fahrt verschlechtert hat. - Die Übertragung der Leistungsverbesserungs-Informationen kann in Echtzeit vorgenommen werden. Jedoch können die Informationen zur Vermeidung weiterer Ablenkungen für den Fahrer gespeichert und nach einer Fahrtätigkeit an den Fahrer übermittelt werden. Auslösende Ereignisse und/oder Schwellenwerte können verwendet werden, um die Übermittlung der Leistungsverbesserungs-Nachrichten zu aktivieren. Alternativ kann der Fahrer optional die Aktivierung der Schnittstelle auswählen. Die gespeicherten Leistungs-Informationen können ausserdem vom Fahrzeug heruntergeladen und als Teil eines unterrichts- oder simulatorbasierten Schulungsprogramms, eines Fahrerfähigkeiten-Einschätzungsprogramms oder eines Verkehrsvollzugsprogramms verwendet werden.
- Zur Förderung der Verwendung des Systems
100 zur Verbesserung der Fahrleistung kann das Feedback so konfiguriert werden, dass es bestimmte Gruppen von Fahrern anspricht. Beispielsweise können für jüngere Fahrer voraufgezeichnete Nachrichten unter Verwendung der Stimmen und Bildern von Personen aus dem Motorsport zur Übermittlung verwendet werden, während für andere Fahrer voraufgezeichnete Nachrichten unter Verwendung bekannter und zuverlässiger Persönlichkeiten verwendet werden können. Alternativ kann das System100 Nachrichten unter Verwendung von Sprachsynthese erzeugen. - Ein bestimmtes Beispiel einer potenziellen Fahrerablenkung bezieht sich auf die Verwendung von Mobiltelefonen. Das System
100 synthetisiert und priorisiert, wie beschrieben, alle eingehenden basierend auf der kognitiven Fahrer-Beanspruchung, einschliesslich aller Mobiltelefonanrufe. Beispielsweise kann das System100 für den Fahrer zwei potenzielle Mobiltelefonanrufe trennen, ohne Anrufe vollständig zur unterbinden. In erster Linie wird der Anrufer durch einer voraufgezeichnete Nachricht informiert, dass er mit einer Person verbunden wird, die gegenwärtig ein Fahrzeug steuert. Der Anrufer hat dann die Option, den Anruf direkt an die Voicemail zu leiten oder den Anruf zum Fahrer durchzustellen. Bevor der Anruf vollständig zum Fahrer durchgestellt wird, schätzt das System100 die Situation, die Bedingungen und die kognitive Beanspruchung des Fahrers ein, um festzustellen, ob die Antwort, den Anruf durchzustellen, angemessen ist. Stellt das System100 fest, dass die Möglichkeit des Fahrers zur Fahrerablenkung ausserhalb bestimmter, vorgegebener Grenzen liegt, d.h., dass die erforderliche kognitive Fahrerbeanspruchung einen Schwellenwert überschreiten wird, kann der eingehende Anruf in Verbindung gehalten und/oder mit einer entsprechenden voraufgezeichneten Nachricht automatisch an die Voicemail umgeleitet werden. - Das System
100 kann so konfiguriert werden, dass es die Anzahl der zum Fahrer eingehenden Anrufe wesentlich begrenzt. Viele Male weiss der Anrufer gar nicht, dass die Person, die er anruft, gerade fährt. Wäre es ihm bekannt gewesen, hätte er vielleicht gar nicht angerufen. Wie oben beschrieben, bietet das System100 einen Mechanismus zur Informierung des Anrufers, dass er einen Fahrer anruft, sowie die Option, den Anruf an die Voicemail umzuleiten. Alternativ kann das System100 so konfiguriert werden, dass es dem Fahrer die Option anbietet, die Anrufe erkennbar nach Anrufer anzunehmen. In solch einer Anordnung wird der eingehende Anruf dem Fahrer über eine Freisprech-Sprachschnittstelle identifiziert. Der Fahrer kann dann den Anruf annehmen, den Anruf zur Voicemail weiterleiten, den Anruf an eine Weiterleitungsnummer leiten oder den Anruf abbrechen, wobei all dies ohne das Wissen des Anrufers durchgeführt werden kann. Alternativ kann die Verbindung des Anrufes kurzzeitig verzögert werden, wobei dem Anrufer eine entsprechende Nachricht bereitgestellt wird. Das System100 kann dann den Anruf nach der kurzen Verzögerung verbinden, sobald es festgestellt hat, dass die kognitive Fahrer-Beanspruchung einen akzeptablen Grad hat. - Das System
100 kann ausserdem so angepasst werden, dass es "Korrekturen" vornimmt, falls ein andauernder Anruf mit einer Verschlechterung der Fahrleistung einhergeht. Wenn das System100 nach dem Annehmen eines Mobiltelefonanrufes feststellt, dass die kognitive Fahrer-Beanspruchung über einen Schwellenwert angestiegen ist und/oder dass es eine Verschlechterung der Fahrleistung unter einen Schwellenwert gibt, kann das System100 den Mobiltelefonanruf automatisch unterbrechen. In einem solchen Fall wird eine Nachricht bereitgestellt, die den Anrufer informiert, dass er kurzzeitig in der Warteschleife gehalten wird. Das System100 kann dem Anrufer ausserdem eine Option zum Hinterlassen einer Voicemail-Nachricht anbieten. Zusätzlich wird dem Fahrer eine entsprechende Nachricht angezeigt, dass der Anruf in die Warteschlange verlegt wurde, damit er über die Unterbechung des Anrufs Bescheid weiss. Gleichermaßen kann der Fahrer den Anrufer zur Voicemail umleiten. - Wie bei anderen Aspekten der Verwendung des Systems
100 werden die die Mobiltelefonverwendung betreffenden Fahrer-Präferenzen dem System100 über die Fahrer-Identifikations-Schnittstelle200 bereitgestellt. Das System100 kann ausserdem mit anderen draht losen Kommunikationsvorrichtungen einschliesslich persönlichen digitalen Assistenten (PDAs – personal digital assistants) und Pagern zum Empfang von Emails und Text- oder Datennachrichten interagieren. - Um sich die Fähigkeit des Systems
100 zur Priorisierung eingehender Mobiltelefonanrufe mit anderen dem Fahrer bereitgestellten Informationen zu Nutze zu machen, ist es erforderlich, dass das Mobiltelefon kommunikativ mit dem System100 gekoppelt ist und von dem System100 gesteuert werden kann. Ein unabhängiges Mobiltelefon, dass nicht an das System100 angepasst werden kann, kann zum Betrieb in kontextbewusster Weise angepasst werden. -
3 erläutert ein tragbares Mobiltelefon300 einschliesslich eines Prozessors302 , eines Speichers304 , eines Sensor-Fusion-Moduls306 und einer Vielzahl von Sensoren, wovon einer als Sensor308 erläutert ist. Obwohl sie als separate Elemente dargestellt sind, kann man klar erkennen, dass diese Elemente des Mobiltelefons300 in eine Einzeleinheit oder ein Einzelmodul integriert werden können. Alternativ kann ein Sensor-Fusion-Modul einschliesslich geeigneter Verarbeitungsfähigkeit als eine Zusatzvorrichtung zu den vorhandenen Mobiltelefonen bereitgestellt werden. Der/Die Sensor/en308 kann Daten wie beispielsweise Umgebungslicht, Temperatur, Bewegung und Geschwindigkeit, Datum, Zeit und Ort aufnehmen. Natürlich können Umgebungsinformationen wie beispielsweise Ort, Geschwindigkeit, Datum und Zeit von dem Netzwerk bereitgestellt werden, wenn das Mobiltelefon300 in einem mobilen Kommunikationsnetzwerk betrieben wird. Der Sensor308 kann jedoch eine GPS-Vorrichtung sein, die in der Lage ist, den Ort, die Geschwindigkeit, die Zeit und den Tag unter Verwendung des GPS-Satellitensystems zu ermitteln. - Das Sensor-Fusion-Modul
306 empfängt Daten von den verschiedenen Sensoren und erstellt eine Hauptbedingungsliste, die an den Prozessor302 übertragen wird, der den Betrieb des Mobiltelefons steuert. Der Prozessor302 arbeitet gemäß einem Steuerprogramm, das in dem Speicher304 gespeichert ist und die Hauptbedingungsliste zur Bereitstellung eines kontextbewussten Betriebs des Mobiltelefons300 verwendet. Der kontextbewusste Betrieb des Mobiltelefons300 kann anhand der folgenden Beispiele erläutert werden. - In einem Beispiel des kontextbewussten Betriebs wird ermittelt, dass sich das Mobiltelefon mit einer Geschwindigkeit von 60 Kilometern pro Stunde (km/h) bewegt. Diese Bedingung wird dem Prozessor
302 von dem Sensor-Fusion-Modul306 als Teil der Hauptbedingungsliste mitgeteilt. Der Prozessor302 leitet aus dieser Geschwindigkeitsbedingung ab, dass sich das Mobiltelefon bei einem Fahrer eines Fahrzeugs befindet, und begibt sich somit in einen Dienst-Zustand, bei dem eingehende Anrufe überprüft werden. Ein Form der Überprüfung stellt sich wie oben beschrieben dar, wobei der Anrufer zuerst informiert wird, dass er einen Fahrer anruft, und ihm dann die Option geboten wird, eine Sprachnachricht zu hinterlassen. - In einem weiteren Beispiel des kontextbewussten Betriebs wird ermittelt, dass das Mobiltelefon eine der menschlichen Körpertemperatur angenäherte Temperatur besitzt. Diese Bedingung wird dem Prozessor
302 von dem Sensor-Fusion-Modul306 als Teil der Hauptbedingungsliste mitgeteilt. Der Prozessor302 arbeitet gemäß dem Steuerprogramm und stellt unter Verwendung der Hauptzustandliste fest, dass sich das Mobiltelefon300 wahrscheinlich nahe dem Körper des Benutzers befindet. Anstatt in einem Rufzustand (klingelnden Modus) zu arbeiten, wird das Mobiltelefon300 veranlasst, in einem Vibrations-Modus zu arbeiten, um einen eingehenden Anruf anzukündigen. - Die folgende Tabelle I legt verschiedene Sensormechanismen, Kontext-Einschätzungen und Betriebs-Dienst-Zustände dar.
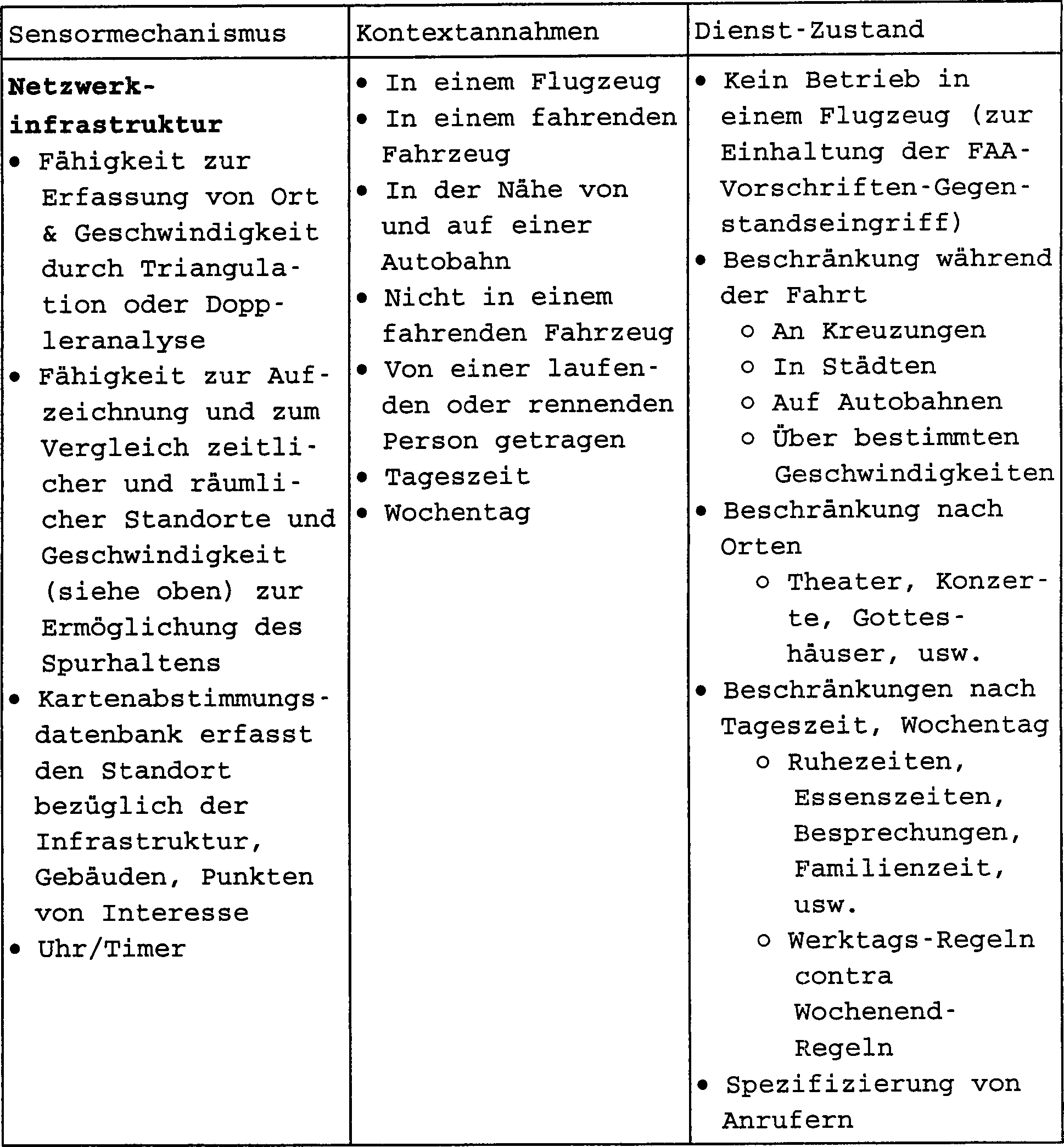
 Tabelle I Kontextbewusste Dienst-Zustände der drahtlosen Modilvorrichtung
Tabelle I Kontextbewusste Dienst-Zustände der drahtlosen Modilvorrichtung
- Gemäss den bevorzugtert Ausführungsformen der Erfindung werden im Zusammenhang mit den
4 –8 Verfahren zur: Einschätzung der Fahrerleistung, Informierung des Fahrers zur Verbesserung der Fahrerleistung, Antwort-Synthese in einem Fahrer-Hilfesystem, Verbesserung der Fahrerleistung durch Leistungs-Feedback und kontextbewussten Gerätebetrieb beschrieben. - In
4 beginnt in Schritt402 ein Verfahren400 zur Einschätzung der Fahrerleistung mit dem Empfang von Fahrzeug-Betriebsdaten aus dem Fahrzeug bezüglich des Fahrzeug-Betriebszustands. Schritt402 umfasst den Empfang von Daten am Sensor-Fusion-Modul102 aus den verschiedenen Sensoren, Systemen und dem Gerät im fahrzeugdatenbezogenen Betrieb des Fahrzeugs. Diese Daten können die Fahrzeuggeschwindigkeit und die Fahrzeugbeschleunigung, die Gaspedalbetätigung und die Bremsbetätigung, den Kraftaufwand am Lenkrad, die Gaspedalposition, die Veränderungsrate der Gaspedalposition, den zusätzlich verfügbaren Gaspedal-Kraftaufwand und Gaspedal-Betätigungsdruck, die Bremsposition, die Veränderungsrate der Bremsposition, den zusätzlich verfügbaren Brems-Kraftaufwand und Brems-Betätigungsdruck, die Lenkradposition, die Veränderungsrate der Lenkradposition, den ausgeübten Druck des Fahrers auf das Lenkrad, den zusätzlich verfügbaren Lenk-Kraftaufwand und andere Betriebsparameter des Fahrzeugs wie beispielsweise die Öltemperatur, den Öldruck, die Kühlflüssigkeits-Temperatur, der Reifendruck, die Bremsflüssigkeits-Temperatur, den Bremsflüssigkeits-Druck, die Getriebetemperatur, Fehlzündungen, die Frontscheibenwischer-Aktivierung, die Front-/Heckscheibenheizungs-Betätigung (zum Beseitigen bzw. Verhindern von beschlagenen Scheiben), diagnostische Systeme usw. umfassen. - In Schritt
404 wird ein interner Bereich des Fahrzeugs überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich der Fahreraktivitäten bereitzustellen. Die überwachten Aktivitäten können die Überwachung der Betätigung der Fahrzeug-Systemsteuerungen durch den Fahrer wie beispielsweise Fahrsteuerungen, Telematik-Systeme, Infotainment-Systeme, Fahrzeuginsassen-Komfortsteuerungen einschliesslich HVAC (Heizungs-, Klima- und Lüftungs technik), Sitzpositions-, Lenkradpositions-, Pedalpositions-, Fensterpositions-, Sonnenblenden-, Sonnen-/Monddach- und Fensterblendensteuerung sowie Kommunkikationssteuerungen umfassen. Die Überwachung der Aktivitäten kann außerdem die Überwachung der Aktivitäten der Fahrgäste umfassen. - In Schritt
406 wird die Fahrzeugumgebung ausserhalb des Fahrzeuges überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich der Betriebsumgebung des Fahrzeuges bereitzustellen. Die Betriebsumgebungsdaten können den Strassenzustand, die Spurfolge, Abstandsdaten, Verkehrsregelungsdaten, und Verkehrsbedingungsdaten umfassten. - In Schritt
408 wird der Fahrer überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich des Fahrerzustands bereitzustellen. Die körperliche Verfassung der Fahrers kann Erschöpfung, Trunkenheit oder einen psychologischen Zustand des Fahrers umfassen. Zusätzlich kann der Ablenkungsgrad des Fahrers überwacht werden. - In Schritt
410 wird die Fahrerleistung eingeschätzt. Die Fahrerleistung kann durch die Ableitung der Fahrerleistung aus den Fahrzeug-Betriebsdaten, den Fahrer-Tätigkeitsdaten, den Umgebungsdaten und den Fahrer-Zustandsdaten eingeschätzt werden. Eine solche Schlussfolgerung kann unter Verwendung eines Ableitungssystems oder eines regelbasierten Entscheidungssystems vorgenommen werden. Alternativ kann eine "Fuzzy-Logic" oder adaptive Zielfindung verwendet werden. - In
5 beginnt in Schritt502 ein Verfahren500 zur Informierung des Fahrers zur Verbesserung der Fahrerleistung durch den Empfang von Betriebsdaten bezüglich des Fahrzeug-Betriebszustands von dem Fahrzeug. Schritt502 umfasst den Empfang von Daten aus den verschiedenen Sensoren, Systemen und dem im fahrzeugdatenbezogenen Betrieb des Fahrzeugs befindlichen Gerät am Sensor-Fusion-Modul102 . Diese Daten können die Fahrzeuggeschwindigkeit und die Fahrzeugbeschleunigung, die Gaspedalbetätigung und die Bremsbetätigung, den Kraftaufwand am Lenk rad, die Gaspedalposition, die Veränderungsrate der Gaspedalposition, den zusätzlich verfügbaren Gaspedal-Kraftaufwand und Gaspedal-Betätigungsdruck, die Bremsposition, die Veränderungsrate der Bremsposition, den zusätzlich verfügbaren Brems-Kraftaufwand und Brems-Betätigungsdruck, die Lenkradposition, die Veränderungsrate der Lenkradposition, den ausgübten Druck des Fahrers auf das Lenkrad, den zusätzlich verfügbaren Lenk-Kraftaufwand und andere Betriebsparameter des Fahrzeugs wie beispielsweise die Öltemperatur, den Öldruck, die Kühlflüssigkeits-Temperatur, den Reifendruck, die Bremsflüssigkeits-Temperatur, den Bremsflüssigkeits-Druck, die Getriebetemperatur, Fehlzündungen, die Frontscheibenwischer-Aktivierung, die Front-/Heckscheibenheizungs-Betätigung (zum Beseitigen bzw. Verhindern von beschlagenen Scheiben), diagnostische Systeme usw. umfassen. - In Schritt
504 wird ein interner Bereich des Fahrzeugs überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich der Fahreraktivitäten bereitzustellen. Die überwachten Aktivitäten können die Überwachung der Betätigung der Fahrzeug-Systemsteuerungen durch den Fahrer wie beispielsweise Fahrsteuerungen, Telematik-Systeme, Infotainment-Systeme, Fahrzeuginsassen-Komfortsteuerungen einschliesslich HVAC (Heizungs-, Klima- und Lüftungstechnik), Sitzpositions-, Lenkradpositions-, Pedalpositions-, Fensterpositions-, Sonnenblenden-, Sonnen-/Monddach- und Fensterblendensteuerung sowie Kommunkikationssteuerungen umfassen. Die Überwachung der Aktivitäten umfasst auch die Überwachung der Aktivitäten der Fahrgäste. - In Schritt
506 wird die Fahrzeugumgebung ausserhalb des Fahrzeuges überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich der Betriebsumgebung des Fahrzeuges bereitzustellen. Die Betriebsumgebungsdaten können den Strassenzustand, die Spurfolge, Abstandsdaten, Verkehrsregelungsdaten, und Verkehrsbedingungsdaten umfassen. - In Schritt
508 wird der Fahrer überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich des Fahrerzustands bereitzustellen. - Die körperliche Verfassung der Fahrers kann Erschöpfung, Trunkenheit oder einen psychologischen Zustand des Fahrers umfassen. Zusätzlich kann der Ablenkungsgrad des Fahrers überwacht werden.
- In Schritt
510 wird die kognitive Beanspruchung des Fahrers eingeschätzt. Die kognitive Beanspruchung kann die Fahrer-Präferenzen, frühere Fahrleistung und Gewohnheiten berücksichtigen. In Schritt512 werden dann die Fahrzeug-Informationen basierend auf der kognitiven Beanspruchung des Fahrers zur Weiterleitung an den Fahrer priorisiert. - Mit Bezug auf
6 beginnt in Schritt602 ein Verfahren600 zum Synthetisieren einer Antwort auf eine Betriebssituation durch die Erzeugung eine Hauptbedingungsliste. Die Hauptbedingungsliste wird durch ein Sensor-Fusion-Modul102 erzeugt und ist eine Fusion der verschiedenen, im Fahrzeug verfügbaren Sensordaten. Die Sensordaten können jegliche verfügbaren Daten innerhalb des Fahrzeuges sein, einschliesslich: Fahrzeug-Betriebsdaten, Fahrer-Tätigkeitsdaten, Umgebungsdaten, Fahrer-Zustandsdaten, Fahrer-Präferenzdaten, Fahreraktions-Feedbackdaten. - In Schritt
604 wird aus der Hauptbedingungsliste eine Betriebssituation ermittelt. Die Betriebssituation kann sein: die Existenz eines Problemzustands, die Existenz einer Problem-Korrektur, die Existenz einer Problem-Eskalation, die Existenz einer Fahreraufgaben-Notwendigkeit, die Existenz einer Agentenaufgaben-Notwendigkeit, die Existenz einer Vervollständigung einer Fahreraufgabe, die Existenz einer Vervollständigung einer Agentenaufgabe. Zusätzlich wird in Schritt606 eine kognitive Fahrer-Beanspruchung ermittelt. - In Schritt
608 wird basierend auf der kognitiven Fahrer-Beanspruchung eine Antwort auf eine Betriebssituation ermittelt. Die Antwort kann die Synchronisation eines Informationsflusses an den Fahrer, die Erzeugung einer Meldung an den Fahrer, die Bereitstellung einer Meldung einschliesslich akustischer, visueller und haptischer Anzeigen oder die Verzögerung oder der Abbruch der Ausführung ausgewählter Dienste innerhalb des Fahrzeuges sein. - In
7 beginnt in Schritt702 ein Verfahren700 zur Verbesserung der Fahrerleistung durch Leistungs-Feedback mit Hilfe des Empfangs von Betriebsdaten aus dem Fahrzeug, die sich auf den Fahrzeug-Betriebszustand beziehen. Schritt702 umfasst den Empfang von Daten aus den verschiedenen Sensoren, Systemen und dem im fahrzeugdatenbezogenen Betrieb des Fahrzeugs befindlichen Gerät am Sensor-Fusion-Modul102 . Diese Daten können die Fahrzeuggeschwindigkeit und die Fahrzeugbeschleunigung, die Gaspedalbetätigung und die Bremsbetätigung, den Kraftaufwand am Lenkrad, die Gaspedalposition, die Veränderungsrate der Gaspedalposition, den zusätzlich verfügbaren Gaspedal-Kraftaufwand und Gaspedal-Betätigungsdruck, die Bremsposition, die Veränderungsrate der Bremsposition, den zusätzlich verfügbaren Brems-Kraftaufwand und Brems-Betätigungsdruck, die Lenkradposition, die Veränderungsrate der Lenkradposition, den ausgübten Druck des Fahrers auf das Lenkrad, den zusätzlich verfügbaren Lenk-Kraftaufwand und andere Betriebsparameter des Fahrzeugs wie beispielsweise die Öltemperatur, den Öldruck, die Kühlflüssigkeits-Temperatur, der Reifendruck, die Bremsflüssigkeits-Temperatur, den Bremsflüssigkeits-Druck, die Getriebetemperatur, Fehlzündungen, die Frontscheibenwischer-Aktivierung, die Front-/Heckscheibenheizungs-Betätigung (zum Beseitigen bzw. Verhindern von beschlagenen Scheiben), diagnostische Systeme usw. umfassen. - In Schritt
704 wird ein interner Bereich des Fahrzeugs überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich der Fahreraktivitäten bereitzustellen. Die überwachten Aktivitäten können die Überwachung der Verwendung der Fahrzeug-Systemsteuerungen durch den Fahrer wie beispielsweise Fahrsteuerungen, Telematik-Systeme, Infotainment-Systeme, Fahrzeuginsassen-Komfortsteuerungen einschliesslich HVAC (Heizungs-, Klima- und Lüftungstechnik), Sitzpositions-, Lenkradpositions-, Pedalpositions-, Fensterpositions-, Sonnenblenden-, Sonnen-/Monddach- und Fen sterblendensteuerung sowie Kommunkikationssteuerungen umfassen. Die Überwachung der Aktivitäten umfasst auch die Überwachung der Aktivitäten der Fahrgäste. - In Schritt
706 wird die Fahrzeugumgebung ausserhalb des Fahrzeuges überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich der Betriebsumgebung des Fahrzeuges bereitzustellen. Die Betriebsumgebungsdaten können den Strassenzustand, die Spurfolge, Abstandsdaten, Verkehrsregelungsdaten, und Verkehrsbedingungsdaten umfassen. - In Schritt
708 wird der Fahrer überwacht, um dem Sensor-Fusion-Modul102 Daten bezüglich des Fahrerzustands bereitzustellen. Die körperliche Verfassung der Fahrers kann Erschöpfung, Trunkenheit oder einen psychologischen Zustand des Fahrers umfassen. Zusätzlich kann der Ablenkungsgrad des Fahrers überwacht werden. - In Schritt
710 wird die Fahrerleistungs-Einschätzung erfasst und aufgezeichnet, so dass die Fahrerleistungs-Einschätzung in Schritt712 an den Fahrer übermittelt werden kann. Schritt712 umfasst die Übermittlung der Fahrleistungs-Einschätzung während des Fahrzeugbetriebs. Überdies kann die Fahrerleistungs-Einschätzung für einen ersten Zeitabschnitt des Fahrzeugbetriebs und für einen zweiten Zeitabschnitt des Fahrzeugbetriebs aufgezeichnet werden und einen Vergleich der beiden Leistungen umfassen. - Das Verfahren kann des Weiteren den Schritt des Empfangs von Fahrer-Präferenzdaten und die Aufzeichnung der Fahrerleistungs-Einschätzung basierend auf den Fahrer-Präferenzdaten umfassen. Zusätzlich kann die Fahrerleistungs-Einschätzung eine Auswertung für jeden Aspekt aus einer Vielzahl von Aspekten eines Fahrzeugbetriebs aufweisen. Die Übermittlung der Fahrerleistungs-Einschätzung kann durch visuelle Anzeige, akustische Anzeige oder haptische Anzeige erfolgen.
- In
8 beginnt in Schritt802 ein Verfahren800 zur Konfiguration eines Dienst-Zustands einer drahtlosen Kommunikationsvorrichtung durch den Empfang eines Satzes von Gerätebetriebs-Parametern, die einen bevorzugten Dienst-Zustand der drahtlosen Kommunikationsvorrichtung für einen Gerätebetreiber definiert. In Schritt804 werden Kontextdaten von mindestens einer Kontextdaten-Quelle empfangen. Die Gerätebetriebs-Parameter und die Kontextdaten können sich jeweils beziehen auf: eine Geschwindigkeit der drahtlosen Kommunikationsvorrichtung, einen Standort der drahtlosen Kommunikationsvorrichtung, die Zeit, eine Tätigkeit des Gerätebetreibers, eine kognitive Beanspruchung des Gerätebetreibers, einen Betrieb eines Fahrzeuges einschliesslich der Fahrzeug-Betriebsdaten und Umgebungsdaten, der Umgebungsbeleuchtung, der Höhenlage und der Umgebungsgeräusche. Die empfangenen Daten können ein Fusion von Daten aus einer Vielzahl von Quellen sein, wie beispielsweise aus dem Inneren des Fahrzeuges, wobei die drahtlose Kommunikationsvorrichtung kommunikativ mit dem Fahrzeug gekoppelt ist. Die Gerätebetriebs-Parameter können über eine persönliche mobile Benutzerschnittstelle, wie beispielsweise eine Fahrzeug-Identifikations-Schnittstelle200 , bereitgestellt werden. - In Schritt
806 wird ein Dienst-Zustand der drahtlosen Kommunikationsvorrichtung eingestellt. Der Service-Zustand kann sein: Anrufweiterleitung, Anrufweiterleitung an Voicemail, Voicemail aktiviert, Rufmodus, Anrufdurchstellungs-Verzögerung und Identifikation der arufenden Partei usw.. - Die drahtlose Kommunikationsvorrichtung kann ein Mobiltelefon, ein Pager, ein persönlicher digitaler Assistent oder eine andere Rechenvorrichtung einschliesslich eines PCs (personal computer) und eines Web-Browsers sein.
Claims (15)
- Verfahren zur Verbesserung der Fahrerleistung durch Leistungs-Feedback, wobei das Verfahren die folgenden Schritte aufweist: Empfang von Fahrzeug-Betriebsdaten (
112 ) von dem Fahrzeug, welche den Betriebszustand des Fahrzeugs betreffen; Überwachung eines Innenabschnitts des Fahrzeugs und Empfang von Fahrer-Tätigkeitsdaten (118 ) vom Innenabschnitt des Fahrzeugs, welche die Tätigkeiten des Fahrers (108 ) in dem Innenabschnitt betreffen; Empfang von Fahrzeug-Umgebungsdaten (114 ) von der Außenumgebung des Fahrzeugs; Überwachung des Fahrers (108 ) und Empfang von Fahrer-Zustandsdaten (116 ), die den Zustand des Fahrers (108 ) betreffen; Aufzeichnung einer Fahrerleistungs-Einschätzung basierend auf den Fahrzeug-Betriebsdaten (112 ), den Fahrer-Tätigkeitsdaten (118 ), den Fahrzeug-Umgebungsdaten (114 ) und den Fahrer-Zustandsdaten (116 ); dadurch gekennzeichnet, dass die Fahrerleistungs-Einschätzung ein Fahrerleistungswert ist, welcher die Fähigkeit des Fahrers zur Ausführung eines Fahrzeugbetriebs im Vergleich mit Erfahrungswerten aus der Praxis einschätzt; Speicherung der Fahrerleistungs-Einschätzung an Bord des Fahrzeugs; und Meldung der Fahrerleistungs-Einschätzung an den Fahrer zur Verbesserung der Fahrerleistung. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt des Empfangs von Fahrzeug-Zustandsdaten (
112 ) den Empfang von Daten umfasst, welche zumindest einen der folgenden Parameter betreffen: Fahrzeuggeschwindigkeit, Fahrzeugbe schleunigung, Gaspedalbetätigung, Bremsbetätigung, Kraft- aufwand am Lenkrad, Gaspedalposition, Veränderungsrate der Gaspedalposition, zusätzlichen verfügbaren Gaspedal-Kraftaufwand, Gaspedal-Betätigungsdruck, Bremsposition, Veränderungsrate der Bremsposition, zusätzlichen verfügbaren Brems-Kraftaufwand, Bremsbetätigungsdruck, Lenkradposition, Veränderungsrate der Lenkradposition, ausgeübten Druck des Fahrers auf das Lenkrad und zusätzlichen verfügbaren Lenk-Kraftaufwand. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt des Empfangs von Fahrer-Tätigkeitsdaten (
118 ) den Empfang von Daten aufweist, welche zumindest Fahrsteuerung, Telematiksteuerung, Fahrzeuginsassen-Komfortsteuerung, Infotainment-Steuerung oder Nachrichtensteuerung betreffen. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt des Empfangs von Fahrer-Zustandsdaten (
116 ) den Empfang von Daten aufweist, welche zumindest Müdigkeit, Trunkenheit oder Zerstreutheit betreffen. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt des Empfangs von Fahrzeug-Umgebungsdaten (
114 ) den Empfang von Daten beinhaltet, welche zumindest Straßenzustand, Spurfolge, Abstand, Verkehrsregelung oder Verkehrszustand betreffen. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt der Bestimmung eines Fahrerleistungs-Einschätzungswerts die Folgerung oder Ableitung eines Fahrerleistungs-Einschätzungswerts aus den Daten beinhaltet.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt der Meldung die Bereitstellung einer vorher aufgezeichneten Nachricht aufweist.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt der Meldung der Fahrerleistungs-Einschätzung die Meldung der Fahrerleistungs-Einschätzung nach Beendigung des Fahrzeugbetriebs aufweist.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt der Meldung der Fahrerleistungs-Einschätzung die Meldung der Fahrerleistungs-Einschätzung während des Betriebs des Fahrzeugs aufweist.
- Verfahren nach Anspruch 1, welches weiter die Aufzeichnung einer ersten Fahrerleistungs-Einschätzung, welche eine erste Zeitperiode des Fahrzeugbetriebs betrifft, und die Aufzeichnung einer zweiten Fahrerleistungs-Einschätzung, welche eine zweite Zeitperiode des Fahrzeugbetriebs betrifft, sowie den Vergleich der ersten Fahrerleistungs-Einschätzung mit der zweiten Fahrerleistungs-Einschätzung aufweist.
- Verfahren nach Anspruch 1, welches weiter den Schritt des Empfangs von Fahrer-Präferenzdaten aufweist, und dadurch gekennzeichnet ist, dass der Schritt der Aufzeichnung einer Fahrerleistungs-Einschätzung die Aufzeichnung einer Fahrerleistungs-Einschätzung basierend auf den Fahrer-Präferenzdaten umfasst.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Fahrerleistungs-Einschätzung die Geschicklichkeit des Fahrers wiedergibt.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Fahrerleistungs-Einschätzung eine Wertung oder Punktliste für jeden Aspekt aus einer Vielzahl von Aspekten eines Fahrzeugbetriebs beinhaltet.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass der Schritt der Meldung der Fahrerleistungs-Einschätzung die Bereitstellung zumindest einer optischen Anzeige, einer akustischen Anzeige oder einer haptischen Anzeige einschließt.
- Vorrichtung zur Verbesserung einer Fahrzeug-Fahrerleistung, wobei die Vorrichtung Folgendes aufweist: ein Sensor-Fusion-Modul (
102 ), wobei das Sensor-Fusion-Modul (102 ) mit einem Fahrzeug-Zustandssensor, einem Fahrzeug-Außensensor, einem Fahrer-Zustandssensor (206 ) und einem Fahrer-Tätigkeitssensor (208 ) gekoppelt ist, welche jeweils Fahrzeug-Zustandsdaten, Fahrzeug-Umgebungsdaten, Fahrer-Zustandsdaten sowie Fahrer-Tätigkeitsdaten an das Sensor-Fusion-Modul (102 ) liefern, wobei das Sensor-Fusion-Modul betriebsbereit ist, um eine Rahmenbedingungsliste basierend auf den von dem Sensor-Fusion-Modul (102 ) empfangenen Daten zu liefern; einen Antwort-Selektor (104 ), welcher mit dem Sensor-Fusion-Modul (102 ) gekoppelt ist, wobei der Antwort-Selektor (104 ) betriebsbereit ist, um einen augenblicklichen Betriebszustand basierend auf der Rahmenbedingungsliste zu bestimmen und um eine Fahrertätigkeit oder -aktion ansprechend auf den augenblicklichen Betriebszustand zur Bereitstellung eines Fahrerleistungs-Einschätzungswerts basierend auf der Rahmenbedingungsliste und der Fahrertätigkeit einzuschätzen; dadurch gekennzeichnet, dass der Fahrerleistungs-Einschätzungswert ein Wert ist, welcher die Fähigkeit des Fahrers zur Ausführung eines Fahrzeugbetriebs im Vergleich mit Erfahrungswerten aus der Praxis zuordnet, wobei die Fahrerleistungs-Einschätzung an Bord des Fahrzeugs gespeichert wird; und einen mit dem Antwort-Selektor (104 ) gekoppelten Aktionserzeuger (106 ) für die Erzeugung einer Feedback-Nachricht an den Fahrer basierend auf dem Fahrerleistung-Einschätzungswert, welcher die Verbesserung der Leistung betrifft.
Applications Claiming Priority (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US240493P | 2000-10-13 | ||
| US240560P | 2000-10-13 | ||
| US240443P | 2000-10-13 | ||
| US240553P | 2000-10-13 | ||
| US240444P | 2000-10-13 | ||
| US24044300P | 2000-10-14 | 2000-10-14 | |
| US24049300P | 2000-10-14 | 2000-10-14 | |
| US24055300P | 2000-10-14 | 2000-10-14 | |
| US24044400P | 2000-10-14 | 2000-10-14 | |
| US24056000P | 2000-10-16 | 2000-10-16 | |
| US09/976,989 US7565230B2 (en) | 2000-10-14 | 2001-10-12 | Method and apparatus for improving vehicle operator performance |
| US976989P | 2001-10-12 | ||
| PCT/US2001/032104 WO2002030700A2 (en) | 2000-10-13 | 2001-10-15 | Method and apparatus for improving vehicle operator performance |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| DE60124937D1 DE60124937D1 (de) | 2007-01-11 |
| DE60124937T2 true DE60124937T2 (de) | 2007-09-20 |
Family
ID=27559297
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE60124937T Expired - Lifetime DE60124937T2 (de) | 2000-10-13 | 2001-10-15 | Verfahren und gerät zur verbesserung des fahrerverhaltens in einem fahrzeug |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7565230B2 (de) |
| EP (1) | EP1326759B8 (de) |
| JP (2) | JP2004518461A (de) |
| KR (1) | KR20030070889A (de) |
| AT (1) | ATE346764T1 (de) |
| DE (1) | DE60124937T2 (de) |
| ES (1) | ES2275748T3 (de) |
| WO (1) | WO2002030700A2 (de) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010018331A1 (de) * | 2010-04-27 | 2011-10-27 | Gm Global Technology Operations Llc (N.D.Ges.D. Staates Delaware) | Vorrichtung und Verfahren zum Erkennen einer Gefahrensituation für ein Fahrzeug |
| US8275348B2 (en) | 2008-05-30 | 2012-09-25 | Volkswagen Ag | Method for managing telephone calls in a vehicle |
| DE102010044449B4 (de) * | 2009-12-31 | 2014-05-08 | Volkswagen Ag | Erkennen des Grades der Fahrfähigkeit des Fahrers eines Kraftfahrzeugs |
| DE102013203910A1 (de) * | 2013-03-07 | 2014-09-11 | Bayerische Motoren Werke Aktiengesellschaft | Datenverarbeitungssystem und Verfahren zum Verarbeiten von Trainingsdaten eines Fahrertrainings für Kraftfahrzeuge |
| DE102014006668A1 (de) | 2014-05-07 | 2014-10-30 | Daimler Ag | Verfahren zur Unterstützung eines Fahrers beim Fahren eines Fahrzeugs |
| DE102016218719A1 (de) * | 2016-09-28 | 2018-03-29 | Robert Bosch Gmbh | Verfahren und Steuereinheit zur Fahreridentifikation, sowie Fahreridentifikationssystem |
| US10937334B2 (en) | 2017-01-31 | 2021-03-02 | Honda Motor Co., Ltd. | Information providing system |
Families Citing this family (304)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10103401A1 (de) * | 2001-01-26 | 2002-08-01 | Daimler Chrysler Ag | Gefahrenabwendungssystem für ein Fahrzeug |
| US7406421B2 (en) * | 2001-10-26 | 2008-07-29 | Intellisist Inc. | Systems and methods for reviewing informational content in a vehicle |
| US7039551B2 (en) * | 2002-02-04 | 2006-05-02 | Hrl Laboratories, Llc | Method and apparatus for calculating an operator distraction level |
| US7761544B2 (en) * | 2002-03-07 | 2010-07-20 | Nice Systems, Ltd. | Method and apparatus for internal and external monitoring of a transportation vehicle |
| JP4200748B2 (ja) * | 2002-11-29 | 2008-12-24 | 富士ゼロックス株式会社 | 触覚インターフェイス装置 |
| US6961644B2 (en) | 2002-12-12 | 2005-11-01 | Alps Automotive, Inc. | Dual haptic vehicle control and display system |
| US7894177B2 (en) | 2005-12-29 | 2011-02-22 | Apple Inc. | Light activated hold switch |
| US7292152B2 (en) * | 2003-06-12 | 2007-11-06 | Temic Automotive Of North America, Inc. | Method and apparatus for classifying vehicle operator activity state |
| US7552000B2 (en) * | 2003-09-08 | 2009-06-23 | C. Rob Hammerstein Gmbh & Co. Kg | Cockpit of an automotive vehicle with a steering wheel and an adjustable seat |
| US7512470B2 (en) * | 2003-10-22 | 2009-03-31 | C. Rob. Hammerstein Gmbh & Co. Kg | Cockpit of an automotive vehicle with a steering wheel and an adjustable seat |
| JP2005189667A (ja) * | 2003-12-26 | 2005-07-14 | Mitsubishi Electric Corp | 車載機器、音声対話ドキュメント作成サーバ及びこれらを用いたナビゲーションシステム |
| US7650509B1 (en) | 2004-01-28 | 2010-01-19 | Gordon & Howard Associates, Inc. | Encoding data in a password |
| US7269504B2 (en) * | 2004-05-12 | 2007-09-11 | Motorola, Inc. | System and method for assigning a level of urgency to navigation cues |
| US7180407B1 (en) * | 2004-11-12 | 2007-02-20 | Pengju Guo | Vehicle video collision event recorder |
| JP2006157274A (ja) * | 2004-11-26 | 2006-06-15 | Kyocera Corp | 携帯通信端末および応答メッセージ送出方法 |
| US20060217935A1 (en) * | 2005-03-28 | 2006-09-28 | General Motors Corporation | Vehicle component usage monitor |
| JP4367370B2 (ja) * | 2005-04-13 | 2009-11-18 | 株式会社デンソー | 車両用ナビゲーション装置 |
| US7532958B2 (en) | 2005-06-24 | 2009-05-12 | General Motors Corporation | Method for real-time assessment of driver workload by a navigation or telematics device |
| US9189596B2 (en) * | 2005-06-29 | 2015-11-17 | National Ict Australia Limited | Measuring cognitive load |
| WO2007016731A1 (en) * | 2005-08-05 | 2007-02-15 | Vigil Systems Pty Ltd | Computerised information collection and training method and apparatus |
| US20080140306A1 (en) * | 2005-11-30 | 2008-06-12 | Snodgrass Ken L | Voice recognition method and system for displaying charts and maps |
| US20070132773A1 (en) * | 2005-12-08 | 2007-06-14 | Smartdrive Systems Inc | Multi-stage memory buffer and automatic transfers in vehicle event recording systems |
| US10878646B2 (en) * | 2005-12-08 | 2020-12-29 | Smartdrive Systems, Inc. | Vehicle event recorder systems |
| US20070150138A1 (en) | 2005-12-08 | 2007-06-28 | James Plante | Memory management in event recording systems |
| US20070135980A1 (en) * | 2005-12-09 | 2007-06-14 | Smartdrive Systems Inc | Vehicle event recorder systems |
| US20070135979A1 (en) * | 2005-12-09 | 2007-06-14 | Smartdrive Systems Inc | Vehicle event recorder systems |
| US20070136063A1 (en) * | 2005-12-12 | 2007-06-14 | General Motors Corporation | Adaptive nametag training with exogenous inputs |
| US20070194881A1 (en) | 2006-02-07 | 2007-08-23 | Schwarz Stanley G | Enforcing payment schedules |
| US9129233B2 (en) * | 2006-02-15 | 2015-09-08 | Catepillar Inc. | System and method for training a machine operator |
| US8731770B2 (en) * | 2006-03-08 | 2014-05-20 | Speed Demon Inc. | Method and apparatus for determining and storing excessive vehicle speed |
| US9477639B2 (en) * | 2006-03-08 | 2016-10-25 | Speed Demon Inc. | Safe driving monitoring system |
| US9848289B2 (en) | 2006-03-08 | 2017-12-19 | Octo Advisory Inc. | Safe driving monitoring system |
| US9201842B2 (en) | 2006-03-16 | 2015-12-01 | Smartdrive Systems, Inc. | Vehicle event recorder systems and networks having integrated cellular wireless communications systems |
| US8996240B2 (en) | 2006-03-16 | 2015-03-31 | Smartdrive Systems, Inc. | Vehicle event recorders with integrated web server |
| JP2007295524A (ja) * | 2006-03-28 | 2007-11-08 | Denso Corp | 情報通信システム、施設側装置、ユーザ側装置、管理装置、車両側装置、施設側プログラム、ユーザ側プログラム、管理プログラム及び車両側プログラム |
| US8630768B2 (en) | 2006-05-22 | 2014-01-14 | Inthinc Technology Solutions, Inc. | System and method for monitoring vehicle parameters and driver behavior |
| US9067565B2 (en) | 2006-05-22 | 2015-06-30 | Inthinc Technology Solutions, Inc. | System and method for evaluating driver behavior |
| US7603228B2 (en) * | 2006-05-25 | 2009-10-13 | Ford Global Technologies, Llc | Haptic apparatus and coaching method for improving vehicle fuel economy |
| GB0614184D0 (en) * | 2006-07-18 | 2006-08-23 | Farnham John | Integrated data logging unit |
| KR100753839B1 (ko) * | 2006-08-11 | 2007-08-31 | 한국전자통신연구원 | 적응형 차량 인터페이스 제공 장치 및 방법 |
| KR100753838B1 (ko) * | 2006-08-11 | 2007-08-31 | 한국전자통신연구원 | 적응형 차량 운전지원 장치 및 방법 |
| US7962342B1 (en) * | 2006-08-22 | 2011-06-14 | Avaya Inc. | Dynamic user interface for the temporarily impaired based on automatic analysis for speech patterns |
| KR100826011B1 (ko) * | 2006-10-24 | 2008-04-29 | 엘지디스플레이 주식회사 | 디스플레이 소자 |
| US8649933B2 (en) * | 2006-11-07 | 2014-02-11 | Smartdrive Systems Inc. | Power management systems for automotive video event recorders |
| US8989959B2 (en) | 2006-11-07 | 2015-03-24 | Smartdrive Systems, Inc. | Vehicle operator performance history recording, scoring and reporting systems |
| US8868288B2 (en) | 2006-11-09 | 2014-10-21 | Smartdrive Systems, Inc. | Vehicle exception event management systems |
| US8139820B2 (en) | 2006-12-13 | 2012-03-20 | Smartdrive Systems Inc. | Discretization facilities for vehicle event data recorders |
| US20080147267A1 (en) * | 2006-12-13 | 2008-06-19 | Smartdrive Systems Inc. | Methods of Discretizing data captured at event data recorders |
| JP4985428B2 (ja) | 2007-02-01 | 2012-07-25 | 株式会社デンソー | ドライバ管理装置および運行管理システム |
| US9026267B2 (en) | 2007-03-09 | 2015-05-05 | Gordon*Howard Associates, Inc. | Methods and systems of selectively enabling a vehicle by way of a portable wireless device |
| JP4259587B2 (ja) * | 2007-03-30 | 2009-04-30 | 株式会社デンソー | データベース装置、注意喚起装置及び運転支援装置 |
| US7937202B2 (en) * | 2007-05-01 | 2011-05-03 | Ronald Van Houten | Seat belt/accelerator behavioral system |
| US8239092B2 (en) * | 2007-05-08 | 2012-08-07 | Smartdrive Systems Inc. | Distributed vehicle event recorder systems having a portable memory data transfer system |
| US7982620B2 (en) * | 2007-05-23 | 2011-07-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for reducing boredom while driving |
| US8825277B2 (en) * | 2007-06-05 | 2014-09-02 | Inthinc Technology Solutions, Inc. | System and method for the collection, correlation and use of vehicle collision data |
| US8666590B2 (en) | 2007-06-22 | 2014-03-04 | Inthinc Technology Solutions, Inc. | System and method for naming, filtering, and recall of remotely monitored event data |
| US9129460B2 (en) | 2007-06-25 | 2015-09-08 | Inthinc Technology Solutions, Inc. | System and method for monitoring and improving driver behavior |
| US7999670B2 (en) | 2007-07-02 | 2011-08-16 | Inthinc Technology Solutions, Inc. | System and method for defining areas of interest and modifying asset monitoring in relation thereto |
| US9117246B2 (en) * | 2007-07-17 | 2015-08-25 | Inthinc Technology Solutions, Inc. | System and method for providing a user interface for vehicle mentoring system users and insurers |
| US8577703B2 (en) | 2007-07-17 | 2013-11-05 | Inthinc Technology Solutions, Inc. | System and method for categorizing driving behavior using driver mentoring and/or monitoring equipment to determine an underwriting risk |
| US8818618B2 (en) | 2007-07-17 | 2014-08-26 | Inthinc Technology Solutions, Inc. | System and method for providing a user interface for vehicle monitoring system users and insurers |
| US20090051510A1 (en) * | 2007-08-21 | 2009-02-26 | Todd Follmer | System and Method for Detecting and Reporting Vehicle Damage |
| US7876205B2 (en) | 2007-10-02 | 2011-01-25 | Inthinc Technology Solutions, Inc. | System and method for detecting use of a wireless device in a moving vehicle |
| US8069479B2 (en) * | 2007-11-27 | 2011-11-29 | Verizon Patent And Licensing Inc. | Position and velocity-based mobile device management |
| US20090150768A1 (en) * | 2007-12-10 | 2009-06-11 | International Business Machines Corporation | Composition-based application user interface framework |
| DE102009006976B4 (de) * | 2008-01-31 | 2021-02-04 | Continental Teves Ag & Co. Ohg | Fahrerassistenzsystem |
| DE602008004435D1 (de) * | 2008-04-02 | 2011-02-24 | Gm Global Tech Operations Inc | Adaptive Lenksteuerung für ein Kraftfahrzeug |
| FI20085501L (fi) * | 2008-05-27 | 2009-11-28 | John Deere Forestry Oy | Työkoneen ja sen käyttäjän tuottavuuden arviointijärjestelmä |
| US20100023265A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with integrated driving style recognition |
| US8260515B2 (en) * | 2008-07-24 | 2012-09-04 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition |
| US8060260B2 (en) * | 2008-07-24 | 2011-11-15 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition based on vehicle passing maneuvers |
| US8280560B2 (en) * | 2008-07-24 | 2012-10-02 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition based on headway distance |
| US8280601B2 (en) * | 2008-07-24 | 2012-10-02 | GM Global Technology Operations LLC | Adaptive vehicle control system with integrated maneuver-based driving style recognition |
| US20100019880A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on traffic sensing |
| US8170740B2 (en) * | 2008-07-24 | 2012-05-01 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition based on vehicle launching |
| US20100023197A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on behavioral diagnosis |
| US20100023180A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on lane-change maneuvers |
| US8195341B2 (en) * | 2008-07-24 | 2012-06-05 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition based on maneuvers at highway on/off ramps |
| US7831407B2 (en) * | 2008-07-24 | 2010-11-09 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on vehicle U-turn maneuvers |
| US20100019964A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition and road condition recognition |
| WO2010014965A2 (en) * | 2008-07-31 | 2010-02-04 | Choicepoint Services, Inc. | Systems & methods of calculating and presenting automobile driving risks |
| JP4955625B2 (ja) * | 2008-08-01 | 2012-06-20 | 株式会社デンソー | 運転アドバイス提供装置、運転診断装置 |
| JP5203841B2 (ja) | 2008-08-01 | 2013-06-05 | 株式会社デンソー | 運転アドバイス提供装置 |
| JP5198969B2 (ja) * | 2008-08-01 | 2013-05-15 | 株式会社デンソー | 運転診断情報提供装置、及び運転診断情報提供システム |
| US8688180B2 (en) | 2008-08-06 | 2014-04-01 | Inthinc Technology Solutions, Inc. | System and method for detecting use of a wireless device while driving |
| CA2736168C (en) | 2008-09-09 | 2018-04-10 | United Parcel Service Of America, Inc. | Systems and methods of utilizing telematics data to improve fleet management operations |
| US11482058B2 (en) | 2008-09-09 | 2022-10-25 | United Parcel Service Of America, Inc. | Systems and methods for utilizing telematics data to improve fleet management operations |
| US8781688B2 (en) * | 2008-11-07 | 2014-07-15 | Volvo Lastvagnar Ab | Method and system for combining sensor data |
| US20100152950A1 (en) * | 2008-12-15 | 2010-06-17 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on vehicle stopping |
| US20100152951A1 (en) * | 2008-12-15 | 2010-06-17 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on vehicle accelerating and decelerating |
| IT1392378B1 (it) * | 2008-12-22 | 2012-03-02 | Ferrari Spa | Metodo di assistenza alla guida prestazionale di un veicolo |
| US9641678B2 (en) * | 2009-01-29 | 2017-05-02 | Ford Global Technologies, Llc | System and method for interrupting an instructional prompt to signal upcoming input over a wireless communication link |
| US8892341B2 (en) | 2009-02-13 | 2014-11-18 | Inthinc Technology Solutions, Inc. | Driver mentoring to improve vehicle operation |
| US8963702B2 (en) | 2009-02-13 | 2015-02-24 | Inthinc Technology Solutions, Inc. | System and method for viewing and correcting data in a street mapping database |
| US20100209890A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill with integrated driving skill recognition |
| US20100209885A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill based on lane change maneuver |
| US20100209891A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on stop-and-go driving behavior |
| US20100209887A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operation, Inc. | Vehicle stability enhancement control adaptation to driving skill based on vehicle backup maneuver |
| US20100209888A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill based on curve-handling maneuvers |
| US20100209884A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on vehicle left and right turns |
| US20100209892A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on manual transmission shift behavior |
| US20100209881A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on behavioral diagnosis |
| US20100209882A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on straight-line driving behavior |
| US8170725B2 (en) * | 2009-02-18 | 2012-05-01 | GM Global Technology Operations LLC | Vehicle stability enhancement control adaptation to driving skill based on highway on/off ramp maneuver |
| US20100209889A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill based on multiple types of maneuvers |
| US20100209886A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on u-turn performance |
| US20100209883A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill based on passing maneuver |
| US20120135382A1 (en) * | 2009-05-12 | 2012-05-31 | The Children's Hospital Of Philadelphia | Individualized mastery-based driver training |
| JP5444898B2 (ja) * | 2009-07-09 | 2014-03-19 | アイシン精機株式会社 | 状態検出装置、状態検出方法及びプログラム |
| CN102763002A (zh) * | 2009-08-05 | 2012-10-31 | 福特全球技术公司 | 用于将车辆信息发送到乘员通信装置的系统和方法 |
| US20110054792A1 (en) * | 2009-08-25 | 2011-03-03 | Inthinc Technology Solutions, Inc. | System and method for determining relative positions of moving objects and sequence of such objects |
| JP5482167B2 (ja) * | 2009-12-10 | 2014-04-23 | アイシン・エィ・ダブリュ株式会社 | 車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム |
| DE112009005485T5 (de) * | 2009-12-28 | 2012-10-18 | Toyota Jidosha Kabushiki Kaisha | Fahrunterstützungsvorrichtung |
| US8457839B2 (en) * | 2010-01-07 | 2013-06-04 | Ford Global Technologies, Llc | Multi-display vehicle information system and method |
| US8060150B2 (en) * | 2010-03-29 | 2011-11-15 | Robert L. Mendenhall | Intra-vehicular mobile device usage detection system and method of using the same |
| SE535868C2 (sv) * | 2010-04-21 | 2013-01-22 | Scania Cv Ab | Bedömningsmetod och system avseende acceleration |
| US9639688B2 (en) | 2010-05-27 | 2017-05-02 | Ford Global Technologies, Llc | Methods and systems for implementing and enforcing security and resource policies for a vehicle |
| GB2496765B (en) | 2010-07-29 | 2014-04-16 | Ford Global Tech Llc | Systems and methods for scheduling driver interface tasks based on driver workload |
| US9213522B2 (en) | 2010-07-29 | 2015-12-15 | Ford Global Technologies, Llc | Systems and methods for scheduling driver interface tasks based on driver workload |
| US8972106B2 (en) | 2010-07-29 | 2015-03-03 | Ford Global Technologies, Llc | Systems and methods for scheduling driver interface tasks based on driver workload |
| US20120041633A1 (en) * | 2010-08-16 | 2012-02-16 | Ford Global Technologies, Llc | Systems and methods for regulating control of a vehicle infotainment system |
| US8880282B2 (en) * | 2010-10-04 | 2014-11-04 | Toyota Motor Engineering & Manufacturing North America, Inc. | Method and system for risk prediction for a support actuation system |
| US8233888B1 (en) * | 2010-10-21 | 2012-07-31 | Sprint Communications Company L.P. | Leveraging mobile-device analytics for informing and call handling |
| US8559932B2 (en) | 2010-12-20 | 2013-10-15 | Ford Global Technologies, Llc | Selective alert processing |
| US9086297B2 (en) | 2011-01-20 | 2015-07-21 | Telenav, Inc. | Navigation system having maneuver attempt training mechanism and method of operation thereof |
| US9452735B2 (en) | 2011-02-10 | 2016-09-27 | Ford Global Technologies, Llc | System and method for controlling a restricted mode in a vehicle |
| US8731736B2 (en) | 2011-02-22 | 2014-05-20 | Honda Motor Co., Ltd. | System and method for reducing driving skill atrophy |
| US9055905B2 (en) | 2011-03-18 | 2015-06-16 | Battelle Memorial Institute | Apparatuses and methods of determining if a person operating equipment is experiencing an elevated cognitive load |
| US9251546B2 (en) | 2011-03-22 | 2016-02-02 | The Boeing Company | System and method for evaluating operation of a vehicle with respect to a plurality of environmental factors |
| JP5555274B2 (ja) * | 2011-03-28 | 2014-07-23 | 株式会社デンソーアイティーラボラトリ | 情報提供タイミング管理装置、情報提供タイミング管理方法およびプログラム |
| US9953468B2 (en) | 2011-03-31 | 2018-04-24 | United Parcel Service Of America, Inc. | Segmenting operational data |
| US8644165B2 (en) | 2011-03-31 | 2014-02-04 | Navteq B.V. | Method and apparatus for managing device operational modes based on context information |
| US9208626B2 (en) | 2011-03-31 | 2015-12-08 | United Parcel Service Of America, Inc. | Systems and methods for segmenting operational data |
| US8522320B2 (en) | 2011-04-01 | 2013-08-27 | Ford Global Technologies, Llc | Methods and systems for authenticating one or more users of a vehicle communications and information system |
| US9037523B2 (en) | 2011-04-07 | 2015-05-19 | Honeywell International Inc. | Multiple two-state classifier output fusion system and method |
| WO2012159195A1 (en) * | 2011-05-20 | 2012-11-29 | Otodata Wireless Network Inc. | Method and system for monitoring interactions with a vehicle |
| US8788113B2 (en) | 2011-06-13 | 2014-07-22 | Ford Global Technologies, Llc | Vehicle driver advisory system and method |
| US20130006674A1 (en) | 2011-06-29 | 2013-01-03 | State Farm Insurance | Systems and Methods Using a Mobile Device to Collect Data for Insurance Premiums |
| US10977601B2 (en) | 2011-06-29 | 2021-04-13 | State Farm Mutual Automobile Insurance Company | Systems and methods for controlling the collection of vehicle use data using a mobile device |
| US10097993B2 (en) | 2011-07-25 | 2018-10-09 | Ford Global Technologies, Llc | Method and apparatus for remote authentication |
| DE102011109564B4 (de) * | 2011-08-05 | 2024-05-02 | Mercedes-Benz Group AG | Verfahren und Vorrichtung zur Überwachung zumindest eines Fahrzeuginsassen und Verfahren zum Betrieb zumindest einer Assistenzvorrichtung |
| US8849519B2 (en) | 2011-08-09 | 2014-09-30 | Ford Global Technologies, Llc | Method and apparatus for vehicle hardware theft prevention |
| DE102011089938B4 (de) * | 2011-12-27 | 2014-05-08 | Hochschule für Technik und Wirtschaft Dresden | Verfahren zur Unterstützung bei der Führung eines Fahrzeuges und Assistenzsystem zur Durchführung des Verfahrens |
| US8915738B2 (en) * | 2012-01-24 | 2014-12-23 | Toyota Motor Engineering & Manufacturing North America, Inc. | Driver quality assessment for driver education |
| GB201201222D0 (en) * | 2012-01-25 | 2012-03-07 | Jaguar Cars | Motor vehicle and method of control of a motor vehicle |
| CA2867447C (en) * | 2012-03-15 | 2021-03-23 | Spireon, Inc. | Geospatial data based assessment of driver behavior and performance |
| US9042872B1 (en) | 2012-04-26 | 2015-05-26 | Intelligent Technologies International, Inc. | In-vehicle driver cell phone detector |
| US8731530B1 (en) * | 2012-04-26 | 2014-05-20 | Intelligent Technologies International, Inc. | In-vehicle driver cell phone detector |
| US9569403B2 (en) | 2012-05-03 | 2017-02-14 | Ford Global Technologies, Llc | Methods and systems for authenticating one or more users of a vehicle communications and information system |
| US20140005886A1 (en) * | 2012-06-29 | 2014-01-02 | Microsoft Corporation | Controlling automotive functionality using internal- and external-facing sensors |
| US10360636B1 (en) | 2012-08-01 | 2019-07-23 | Allstate Insurance Company | System for capturing passenger and trip data for a taxi vehicle |
| US9728228B2 (en) | 2012-08-10 | 2017-08-08 | Smartdrive Systems, Inc. | Vehicle event playback apparatus and methods |
| US20140074480A1 (en) * | 2012-09-11 | 2014-03-13 | GM Global Technology Operations LLC | Voice stamp-driven in-vehicle functions |
| JP6215950B2 (ja) * | 2012-09-17 | 2017-10-18 | ボルボ ラストバグナー アクチエボラグ | 状況に基づいた指導メッセージを車両の運転者に与える方法 |
| US9424696B2 (en) * | 2012-10-04 | 2016-08-23 | Zonar Systems, Inc. | Virtual trainer for in vehicle driver coaching and to collect metrics to improve driver performance |
| US8758127B2 (en) * | 2012-11-08 | 2014-06-24 | Audible, Inc. | In-vehicle gaming system for a driver |
| WO2014085302A1 (en) * | 2012-11-27 | 2014-06-05 | Faurecia Automotive Seating, Llc | Vehicle seat with integrated sensors |
| US9665997B2 (en) * | 2013-01-08 | 2017-05-30 | Gordon*Howard Associates, Inc. | Method and system for providing feedback based on driving behavior |
| US9127955B2 (en) * | 2013-01-31 | 2015-09-08 | GM Global Technology Operations LLC | Adaptive user guidance for navigation and location-based services |
| US9688246B2 (en) | 2013-02-25 | 2017-06-27 | Ford Global Technologies, Llc | Method and apparatus for in-vehicle alarm activation and response handling |
| US8947221B2 (en) | 2013-02-26 | 2015-02-03 | Ford Global Technologies, Llc | Method and apparatus for tracking device connection and state change |
| US10963966B1 (en) | 2013-09-27 | 2021-03-30 | Allstate Insurance Company | Electronic exchange of insurance information |
| US8799034B1 (en) | 2013-03-08 | 2014-08-05 | Allstate University Company | Automated accident detection, fault attribution, and claims processing |
| US9019092B1 (en) | 2013-03-08 | 2015-04-28 | Allstate Insurance Company | Determining whether a vehicle is parked for automated accident detection, fault attribution, and claims processing |
| US10032226B1 (en) | 2013-03-08 | 2018-07-24 | Allstate Insurance Company | Automatic exchange of information in response to a collision event |
| US9141583B2 (en) | 2013-03-13 | 2015-09-22 | Ford Global Technologies, Llc | Method and system for supervising information communication based on occupant and vehicle environment |
| US8928471B2 (en) | 2013-03-14 | 2015-01-06 | Gordon*Howard Associates, Inc. | Methods and systems related to remote tamper detection |
| US9002536B2 (en) | 2013-03-14 | 2015-04-07 | Ford Global Technologies, Llc | Key fob security copy to a mobile phone |
| US8862320B2 (en) | 2013-03-14 | 2014-10-14 | Ford Global Technologies, Llc | Method and apparatus for ambient lighting incoming message alert |
| US9064420B2 (en) | 2013-03-14 | 2015-06-23 | Honda Motor Co., Ltd. | Augmented reality heads up display (HUD) for yield to pedestrian safety cues |
| US9840229B2 (en) | 2013-03-14 | 2017-12-12 | Gordon*Howard Associates, Inc. | Methods and systems related to a remote tamper detection |
| US9378480B2 (en) | 2013-03-14 | 2016-06-28 | Gordon*Howard Associates, Inc. | Methods and systems related to asset identification triggered geofencing |
| US9035756B2 (en) | 2013-03-14 | 2015-05-19 | Gordon*Howard Associates, Inc. | Methods and systems related to remote tamper detection |
| US9164281B2 (en) | 2013-03-15 | 2015-10-20 | Honda Motor Co., Ltd. | Volumetric heads-up display with dynamic focal plane |
| US8909212B2 (en) | 2013-03-14 | 2014-12-09 | Ford Global Technologies, Llc | Method and apparatus for disclaimer presentation and confirmation |
| US10339711B2 (en) | 2013-03-15 | 2019-07-02 | Honda Motor Co., Ltd. | System and method for providing augmented reality based directions based on verbal and gestural cues |
| US10445758B1 (en) * | 2013-03-15 | 2019-10-15 | Allstate Insurance Company | Providing rewards based on driving behaviors detected by a mobile computing device |
| US10215583B2 (en) | 2013-03-15 | 2019-02-26 | Honda Motor Co., Ltd. | Multi-level navigation monitoring and control |
| US9747898B2 (en) | 2013-03-15 | 2017-08-29 | Honda Motor Co., Ltd. | Interpretation of ambiguous vehicle instructions |
| US9251715B2 (en) | 2013-03-15 | 2016-02-02 | Honda Motor Co., Ltd. | Driver training system using heads-up display augmented reality graphics elements |
| US9378644B2 (en) | 2013-03-15 | 2016-06-28 | Honda Motor Co., Ltd. | System and method for warning a driver of a potential rear end collision |
| US9393870B2 (en) | 2013-03-15 | 2016-07-19 | Honda Motor Co., Ltd. | Volumetric heads-up display with dynamic focal plane |
| US8972103B2 (en) | 2013-03-19 | 2015-03-03 | Ford Global Technologies, Llc | Method of building and using local map of vehicle drive path |
| US9037340B2 (en) * | 2013-03-19 | 2015-05-19 | Ford Global Technologies, Llc | System and method for modifying adaptive cruise control set points |
| SE537931C2 (sv) * | 2013-04-08 | 2015-11-24 | Scania Cv Ab | Profilanvändning för infotainment i fordon |
| US9025140B2 (en) | 2013-05-07 | 2015-05-05 | Google Inc. | Methods and systems for detecting weather conditions including sunlight using vehicle onboard sensors |
| US9632210B2 (en) | 2013-05-07 | 2017-04-25 | Google Inc. | Methods and systems for detecting weather conditions using vehicle onboard sensors |
| US8983705B2 (en) | 2013-04-30 | 2015-03-17 | Google Inc. | Methods and systems for detecting weather conditions including fog using vehicle onboard sensors |
| US9207323B2 (en) | 2013-04-11 | 2015-12-08 | Google Inc. | Methods and systems for detecting weather conditions including wet surfaces using vehicle onboard sensors |
| DE112014001607B4 (de) * | 2013-04-25 | 2021-09-02 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Situationswahrnehmungssystem und -verfahren |
| US10247854B2 (en) | 2013-05-07 | 2019-04-02 | Waymo Llc | Methods and systems for detecting weather conditions using vehicle onboard sensors |
| US9619695B2 (en) | 2013-06-06 | 2017-04-11 | Visteon Global Technologies, Inc. | Gaze time indicator for a vehicle |
| US9013333B2 (en) | 2013-06-24 | 2015-04-21 | Gordon*Howard Associates, Inc. | Methods and systems related to time triggered geofencing |
| JP5671107B2 (ja) * | 2013-07-30 | 2015-02-18 | フォード グローバル テクノロジーズ、リミテッド ライアビリティ カンパニー | 車両 |
| JP2014029689A (ja) * | 2013-07-30 | 2014-02-13 | Ford Global Technologies Llc | 運転者インタフェースタスクを管理する方法、及び、車両 |
| JP2014013576A (ja) * | 2013-07-30 | 2014-01-23 | Ford Global Technologies Llc | 運転者インタフェースシステム、及び、運転者インタフェースタスクを管理する方法、並びに、車両 |
| CA2851465C (en) * | 2013-08-30 | 2020-03-24 | Motohide Sugihara | Management system and management method for mining machine |
| US10572943B1 (en) | 2013-09-10 | 2020-02-25 | Allstate Insurance Company | Maintaining current insurance information at a mobile device |
| US9807196B2 (en) | 2013-09-17 | 2017-10-31 | Toyota Motor Sales, U.S.A. | Automated social network interaction system for a vehicle |
| US9340155B2 (en) * | 2013-09-17 | 2016-05-17 | Toyota Motor Sales, U.S.A., Inc. | Interactive vehicle window display system with user identification |
| US9400564B2 (en) | 2013-09-17 | 2016-07-26 | Toyota Motor Engineering & Manufacturing North America, Inc. | Interactive vehicle window display system with a safe driving reminder system |
| US9443270B1 (en) | 2013-09-17 | 2016-09-13 | Allstate Insurance Company | Obtaining insurance information in response to optical input |
| US9387824B2 (en) | 2013-09-17 | 2016-07-12 | Toyota Motor Engineering & Manufacturing North America, Inc. | Interactive vehicle window display system with user identification and image recording |
| US10272920B2 (en) * | 2013-10-11 | 2019-04-30 | Panasonic Intellectual Property Corporation Of America | Processing method, program, processing apparatus, and detection system |
| US9151631B2 (en) * | 2013-10-14 | 2015-10-06 | Ford Global Technologies, Llc | Vehicle fueling route planning |
| US9501878B2 (en) | 2013-10-16 | 2016-11-22 | Smartdrive Systems, Inc. | Vehicle event playback apparatus and methods |
| US20150121246A1 (en) * | 2013-10-25 | 2015-04-30 | The Charles Stark Draper Laboratory, Inc. | Systems and methods for detecting user engagement in context using physiological and behavioral measurement |
| US9172477B2 (en) | 2013-10-30 | 2015-10-27 | Inthinc Technology Solutions, Inc. | Wireless device detection using multiple antennas separated by an RF shield |
| US9610955B2 (en) | 2013-11-11 | 2017-04-04 | Smartdrive Systems, Inc. | Vehicle fuel consumption monitor and feedback systems |
| US9805521B1 (en) | 2013-12-03 | 2017-10-31 | United Parcel Service Of America, Inc. | Systems and methods for assessing turns made by a vehicle |
| US9188449B2 (en) * | 2013-12-06 | 2015-11-17 | Harman International Industries, Incorporated | Controlling in-vehicle computing system based on contextual data |
| KR101539302B1 (ko) * | 2013-12-11 | 2015-07-30 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| US9251630B2 (en) | 2013-12-17 | 2016-02-02 | At&T Intellectual Property I, L.P. | Method, computer-readable storage device and apparatus for exchanging vehicle information |
| US8892310B1 (en) | 2014-02-21 | 2014-11-18 | Smartdrive Systems, Inc. | System and method to detect execution of driving maneuvers |
| US9568030B2 (en) * | 2014-03-24 | 2017-02-14 | Caterpillar Inc. | System and method for managing machine power system |
| US9349284B2 (en) | 2014-04-24 | 2016-05-24 | International Business Machines Corporation | Regional driving trend modification using autonomous vehicles |
| US9304515B2 (en) | 2014-04-24 | 2016-04-05 | Lenovo Enterprise Solutions (Singapore) Pte. Ltd. | Regional operation modes for autonomous vehicles |
| KR101575051B1 (ko) * | 2014-06-13 | 2015-12-21 | 엘지전자 주식회사 | 웨어러블 디바이스 및 그 제어방법 |
| GB2529997B (en) * | 2014-05-01 | 2019-01-02 | Jaguar Land Rover Ltd | Vehicle communication system with occupant monitoring |
| CN103985167B (zh) * | 2014-05-16 | 2017-03-29 | 方昌銮 | 一种车辆运输工作量统计方法 |
| US9972054B1 (en) | 2014-05-20 | 2018-05-15 | State Farm Mutual Automobile Insurance Company | Accident fault determination for autonomous vehicles |
| US9234764B2 (en) | 2014-05-20 | 2016-01-12 | Honda Motor Co., Ltd. | Navigation system initiating conversation with driver |
| US10319039B1 (en) | 2014-05-20 | 2019-06-11 | State Farm Mutual Automobile Insurance Company | Accident fault determination for autonomous vehicles |
| US10373259B1 (en) | 2014-05-20 | 2019-08-06 | State Farm Mutual Automobile Insurance Company | Fully autonomous vehicle insurance pricing |
| US10185999B1 (en) | 2014-05-20 | 2019-01-22 | State Farm Mutual Automobile Insurance Company | Autonomous feature use monitoring and telematics |
| US10599155B1 (en) | 2014-05-20 | 2020-03-24 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation feature monitoring and evaluation of effectiveness |
| US11669090B2 (en) | 2014-05-20 | 2023-06-06 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation feature monitoring and evaluation of effectiveness |
| US10354330B1 (en) | 2014-05-20 | 2019-07-16 | State Farm Mutual Automobile Insurance Company | Autonomous feature use monitoring and insurance pricing |
| US9248842B1 (en) | 2014-07-14 | 2016-02-02 | Toyota Motor Engineering & Manufacturing North America, Inc. | Environment-based function lock system for a vehicle |
| US9786154B1 (en) | 2014-07-21 | 2017-10-10 | State Farm Mutual Automobile Insurance Company | Methods of facilitating emergency assistance |
| US9972184B2 (en) * | 2014-07-24 | 2018-05-15 | State Farm Mutual Automobile Insurance Company | Systems and methods for monitoring a vehicle operator and for monitoring an operating environment within the vehicle |
| WO2016019706A1 (zh) * | 2014-08-05 | 2016-02-11 | 深圳市元征科技股份有限公司 | 一种驾驶行为指引信息的生成方法、装置及系统 |
| US9663127B2 (en) | 2014-10-28 | 2017-05-30 | Smartdrive Systems, Inc. | Rail vehicle event detection and recording system |
| DE102015105581A1 (de) * | 2014-11-03 | 2016-05-04 | Audi Ag | System und Verfahren zur Überwachung des Gesundheitszustandes und/oder des Befindens eines Fahrzeuginsassen |
| US11069257B2 (en) | 2014-11-13 | 2021-07-20 | Smartdrive Systems, Inc. | System and method for detecting a vehicle event and generating review criteria |
| US11127290B1 (en) | 2014-11-13 | 2021-09-21 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle infrastructure communication device |
| US10607095B1 (en) * | 2015-01-13 | 2020-03-31 | State Farm Mutual Automobile Insurance Company | Apparatuses, systems and methods for classifying digital images |
| US10713717B1 (en) | 2015-01-22 | 2020-07-14 | Allstate Insurance Company | Total loss evaluation and handling system and method |
| US10137902B2 (en) * | 2015-02-12 | 2018-11-27 | Harman International Industries, Incorporated | Adaptive interactive voice system |
| US9679420B2 (en) | 2015-04-01 | 2017-06-13 | Smartdrive Systems, Inc. | Vehicle event recording system and method |
| US10249123B2 (en) | 2015-04-09 | 2019-04-02 | Ford Global Technologies, Llc | Systems and methods for mobile phone key fob management |
| US10083551B1 (en) | 2015-04-13 | 2018-09-25 | Allstate Insurance Company | Automatic crash detection |
| US9767625B1 (en) | 2015-04-13 | 2017-09-19 | Allstate Insurance Company | Automatic crash detection |
| US20160334221A1 (en) | 2015-05-11 | 2016-11-17 | United Parcel Service Of America, Inc. | Determining street segment headings |
| US10226702B2 (en) * | 2015-05-25 | 2019-03-12 | International Business Machines Corporation | Vehicle entertainment system |
| US9167418B1 (en) * | 2015-06-22 | 2015-10-20 | Invictus Technology Group, Inc. | Method and apparatus for controlling input to a mobile computing device located inside a vehicle |
| US20210272207A1 (en) | 2015-08-28 | 2021-09-02 | State Farm Mutual Automobile Insurance Company | Vehicular driver profiles and discounts |
| US11307042B2 (en) | 2015-09-24 | 2022-04-19 | Allstate Insurance Company | Three-dimensional risk maps |
| US10717406B2 (en) | 2015-10-26 | 2020-07-21 | Active Knowledge Ltd. | Autonomous vehicle having an external shock-absorbing energy dissipation padding |
| US10059347B2 (en) | 2015-10-26 | 2018-08-28 | Active Knowledge Ltd. | Warning a vehicle occupant before an intense movement |
| US10710608B2 (en) | 2015-10-26 | 2020-07-14 | Active Knowledge Ltd. | Provide specific warnings to vehicle occupants before intense movements |
| US11332061B2 (en) | 2015-10-26 | 2022-05-17 | Atnomity Ltd. | Unmanned carrier for carrying urban manned vehicles |
| GB2545073A (en) | 2015-10-26 | 2017-06-07 | Active Knowledge Ltd | Combining video see-through that imitates an automobile window with other video |
| US10997534B2 (en) | 2015-11-20 | 2021-05-04 | Caterpillar Inc. | System and method for connecting an operator with worksite operations |
| US9779562B1 (en) * | 2015-12-21 | 2017-10-03 | Lytx, Inc. | System for automatically characterizing a vehicle |
| US9701279B1 (en) | 2016-01-12 | 2017-07-11 | Gordon*Howard Associates, Inc. | On board monitoring device |
| US10324463B1 (en) | 2016-01-22 | 2019-06-18 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation adjustment based upon route |
| US11242051B1 (en) | 2016-01-22 | 2022-02-08 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle action communications |
| US10134278B1 (en) | 2016-01-22 | 2018-11-20 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle application |
| US10395332B1 (en) | 2016-01-22 | 2019-08-27 | State Farm Mutual Automobile Insurance Company | Coordinated autonomous vehicle automatic area scanning |
| US11441916B1 (en) | 2016-01-22 | 2022-09-13 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle trip routing |
| US9940834B1 (en) | 2016-01-22 | 2018-04-10 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle application |
| US11719545B2 (en) | 2016-01-22 | 2023-08-08 | Hyundai Motor Company | Autonomous vehicle component damage and salvage assessment |
| US10493936B1 (en) | 2016-01-22 | 2019-12-03 | State Farm Mutual Automobile Insurance Company | Detecting and responding to autonomous vehicle collisions |
| CN107107888A (zh) * | 2016-02-22 | 2017-08-29 | 深圳市元征科技股份有限公司 | 汽车尾气检测及控制方法及装置 |
| US10699347B1 (en) | 2016-02-24 | 2020-06-30 | Allstate Insurance Company | Polynomial risk maps |
| US9639804B1 (en) | 2016-03-22 | 2017-05-02 | Smartdrive Systems, Inc. | System and method to determine responsiveness of a driver of a vehicle to feedback regarding driving behaviors |
| US10918337B2 (en) | 2016-06-03 | 2021-02-16 | Faurecia Automotive Seating, Llc | Vehicle seat with integrated sensors |
| DE102016110798A1 (de) * | 2016-06-13 | 2017-12-14 | 365FarmNet Group GmbH & Co. KG | Verfahren zur Zustandsakquisition einer landwirtschaftlichen Arbeitseinheit |
| US11197637B2 (en) | 2016-06-20 | 2021-12-14 | Faurecia Automotive Seating, Llc | Control system for a vehicle seat |
| US11173919B2 (en) * | 2016-07-20 | 2021-11-16 | Toyota Motor Europe | Control device, system and method for determining a comfort level of a driver |
| US10730524B2 (en) | 2016-09-07 | 2020-08-04 | Faurecia Automotive Seating, Llc | Vehicle seat |
| US10825354B2 (en) | 2016-09-09 | 2020-11-03 | Apex Pro, LLC | Performance coaching method and apparatus |
| US11361380B2 (en) | 2016-09-21 | 2022-06-14 | Allstate Insurance Company | Enhanced image capture and analysis of damaged tangible objects |
| US10902525B2 (en) | 2016-09-21 | 2021-01-26 | Allstate Insurance Company | Enhanced image capture and analysis of damaged tangible objects |
| US10264111B2 (en) | 2016-10-04 | 2019-04-16 | Allstate Solutions Private Limited | Mobile device communication access and hands-free device activation |
| US9979813B2 (en) | 2016-10-04 | 2018-05-22 | Allstate Solutions Private Limited | Mobile device communication access and hands-free device activation |
| US11295218B2 (en) | 2016-10-17 | 2022-04-05 | Allstate Solutions Private Limited | Partitioning sensor based data to generate driving pattern map |
| US10977956B1 (en) * | 2016-11-01 | 2021-04-13 | State Farm Mutual Automobile Insurance Company | Systems and methods for virtual reality based driver training |
| DE102016224635A1 (de) * | 2016-12-09 | 2018-06-14 | Zf Friedrichshafen Ag | Bedieneinrichtung für ein Infotainmentsystem eines Kraftfahrzeugs, Verfahren zur Ermittlung des Aufenthaltsortes einer Bedienperson eines solchen Bedienelements |
| CN106740857A (zh) * | 2017-01-09 | 2017-05-31 | 张军 | 一种基于多核处理器的智能行车预警系统原型 |
| CN106585641A (zh) * | 2017-01-11 | 2017-04-26 | 张军 | 一种基于多核处理器的智能行车预警系统架构 |
| DE102017201728B4 (de) | 2017-02-03 | 2022-02-17 | Audi Ag | Steuervorrichtung zum Erzeugen von Steuerdaten für Aktuatoren zum Konfigurieren einer Innenraumsituation eines Kraftfahrzeugs sowie Kraftfahrzeug und Verfahren zum Betreiben einer Steuervorrichtung |
| US10338802B2 (en) * | 2017-02-08 | 2019-07-02 | International Business Machines Corporation | Monitoring an activity and determining the type of actor performing the activity |
| US11225267B2 (en) * | 2017-03-10 | 2022-01-18 | The Hi-Tech Robotic Systemz Ltd | Single casing advanced driver assistance system |
| CN107025704A (zh) | 2017-03-14 | 2017-08-08 | 上海小蚁科技有限公司 | 基于加速度传感器的驾驶行为检测方法及装置、行车记录仪和汽车 |
| US10937103B1 (en) | 2017-04-21 | 2021-03-02 | Allstate Insurance Company | Machine learning based accident assessment |
| US10654411B2 (en) * | 2017-07-26 | 2020-05-19 | Uber Technologies, Inc. | Detecting service provider state based on received and historic telematics data and service provider characteristics |
| US11083379B2 (en) | 2017-08-02 | 2021-08-10 | Faurecia Automotive Seating, Llc | Health-monitoring seat cover |
| US11562656B2 (en) * | 2017-11-27 | 2023-01-24 | BlueOwl, LLC | Systems and methods for improving driver safety using uplift modeling |
| US11001273B2 (en) * | 2018-05-22 | 2021-05-11 | International Business Machines Corporation | Providing a notification based on a deviation from a determined driving behavior |
| EP3576074A1 (de) * | 2018-06-01 | 2019-12-04 | Volvo Car Corporation | Verfahren und system zur unterstützung von fahrern beim fahren mit vorsicht |
| US10850746B2 (en) * | 2018-07-24 | 2020-12-01 | Harman International Industries, Incorporated | Coordinating delivery of notifications to the driver of a vehicle to reduce distractions |
| US10699556B1 (en) | 2019-03-01 | 2020-06-30 | Honeywell International Inc. | System and method for plant operation gap analysis and guidance solution |
| US11308800B2 (en) | 2019-12-05 | 2022-04-19 | Toyota Motor North America, Inc. | Transport impact reporting based on sound levels |
| US11107355B2 (en) | 2019-12-05 | 2021-08-31 | Toyota Motor North America, Inc. | Transport dangerous driving reporting |
| US10832699B1 (en) | 2019-12-05 | 2020-11-10 | Toyota Motor North America, Inc. | Impact media sharing |
| US11769426B2 (en) * | 2020-02-18 | 2023-09-26 | BlueOwl, LLC | Systems and methods for creating driving challenges |
| JP2021149246A (ja) * | 2020-03-17 | 2021-09-27 | Necフィールディング株式会社 | 安全運転支援装置、システム、方法、及びプログラム |
| DE102020133235A1 (de) | 2020-12-11 | 2022-06-15 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum betreiben eines fahrzeugs und einer telefon-vorrichtung, kraftfahrzeug und computerprogrammprodukt |
| US11845457B2 (en) | 2021-02-19 | 2023-12-19 | Toyota Research Institute, Inc. | System and method for training an operator of a vehicle |
| US20230166738A1 (en) * | 2021-11-30 | 2023-06-01 | Continental Automotive Systems, Inc. | Operator reaction time caulcation for street vehicles |
| DE102022102442A1 (de) | 2022-02-02 | 2023-08-03 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtung zur Priorisierung von Ausgabeelementen an einen Fahrer eines Fahrzeugs |
| US20240070595A1 (en) * | 2022-08-31 | 2024-02-29 | Carnegie Robotics, Llc | Method for evaluating performance of an operator of a service vehicle |
Family Cites Families (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2164334A5 (de) * | 1971-12-06 | 1973-07-27 | Lead | |
| US4275378A (en) * | 1978-05-23 | 1981-06-23 | Kiloking (Proprietary) Limited | Monitoring the operation of a vehicle |
| US4933852A (en) * | 1979-08-22 | 1990-06-12 | Lemelson Jerome H | Machine operation indicating system and method |
| JPS5790106A (en) * | 1980-11-26 | 1982-06-04 | Nippon Denso Co Ltd | Driving indicator for automobile |
| US4843578A (en) * | 1984-10-01 | 1989-06-27 | Wade Ted R | Vehicle speed monitoring and logging means |
| US4716458A (en) * | 1987-03-06 | 1987-12-29 | Heitzman Edward F | Driver-vehicle behavior display apparatus |
| JPH01195139A (ja) | 1988-01-30 | 1989-08-07 | Suzuki Motor Co Ltd | エンジン出力制御装置 |
| JP2625148B2 (ja) * | 1988-04-11 | 1997-07-02 | 富士重工業株式会社 | 車載電子制御装置 |
| US5074144A (en) * | 1989-02-27 | 1991-12-24 | Gary F. Krofchalk | Vehicle performance monitoring system |
| US4945759A (en) * | 1989-02-27 | 1990-08-07 | Gary F. Krofchalk | Vehicle performance monitoring system |
| DE3927921C1 (de) * | 1989-08-24 | 1990-07-26 | Dr.Ing.H.C. F. Porsche Ag, 7000 Stuttgart, De | |
| SE9002650D0 (sv) | 1990-08-15 | 1990-08-15 | Sses Ab | Saett och anordning vid fordon |
| US5207095A (en) * | 1991-10-11 | 1993-05-04 | Liberty Mutual Insurance Company | Vehicle braking technique evaluation apparatus |
| EP0576703B1 (de) * | 1992-06-30 | 1995-11-02 | Siemens Aktiengesellschaft | Getriebesteuerung |
| US5465079A (en) * | 1992-08-14 | 1995-11-07 | Vorad Safety Systems, Inc. | Method and apparatus for determining driver fitness in real time |
| US5769085A (en) * | 1993-01-06 | 1998-06-23 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Apparatus for detecting awareness of a vehicle driver and method thereof |
| US5983161A (en) * | 1993-08-11 | 1999-11-09 | Lemelson; Jerome H. | GPS vehicle collision avoidance warning and control system and method |
| US5482314A (en) * | 1994-04-12 | 1996-01-09 | Aerojet General Corporation | Automotive occupant sensor system and method of operation by sensor fusion |
| US5499182A (en) * | 1994-12-07 | 1996-03-12 | Ousborne; Jeffrey | Vehicle driver performance monitoring system |
| US6278362B1 (en) * | 1995-01-12 | 2001-08-21 | Honda Giken Kogyo Kabushiki Kaisha | Driving state-monitoring apparatus for automotive vehicles |
| DE19630970B4 (de) * | 1995-08-01 | 2008-12-24 | Honda Giken Kogyo K.K. | Fahrzustandsüberwachungseinrichtung für Kraftfahrzeuge |
| US5797134A (en) * | 1996-01-29 | 1998-08-18 | Progressive Casualty Insurance Company | Motor vehicle monitoring system for determining a cost of insurance |
| US6021369A (en) * | 1996-06-27 | 2000-02-01 | Yamaha Hatsudoki Kabushiki Kaisha | Integrated controlling system |
| JP3272960B2 (ja) | 1996-08-19 | 2002-04-08 | 株式会社データ・テック | ドライビングレコーダ及び車両の運行解析装置 |
| JPH10313359A (ja) | 1997-05-12 | 1998-11-24 | Nec Corp | 自動応答電話装置 |
| US6249720B1 (en) * | 1997-07-22 | 2001-06-19 | Kabushikikaisha Equos Research | Device mounted in vehicle |
| US5978729A (en) * | 1997-10-15 | 1999-11-02 | Caterpillar Inc. | Electronic engine control and method of operating same |
| NL1009775C2 (nl) | 1998-07-30 | 2000-02-01 | Univ Twente | Systeem en werkwijze voor het efficiënt besturen van een motorvoertuig. |
| US6268803B1 (en) * | 1998-08-06 | 2001-07-31 | Altra Technologies Incorporated | System and method of avoiding collisions |
| JP3044025B1 (ja) | 1998-12-09 | 2000-05-22 | 株式会社データ・テック | 運転傾向性の分析が可能な運行管理システム及びその構成装置 |
| SE9804124D0 (sv) | 1998-11-26 | 1998-11-26 | Greger Andersson | Förfarande för att kartlägga förarbeteenden samt anläggning för förfarandets genomförande |
| US6227862B1 (en) * | 1999-02-12 | 2001-05-08 | Advanced Drivers Education Products And Training, Inc. | Driver training system |
| US6200139B1 (en) * | 1999-02-26 | 2001-03-13 | Intel Corporation | Operator training system |
| ATA47899A (de) | 1999-03-17 | 2003-06-15 | Fahrertraining & Motorsportman | Verfahren und vorrichtung zur überwachung der fahrtüchtigkeit einer ein fahrzeug oder einen fahrsimulator steuernden person |
| JP3831171B2 (ja) * | 1999-05-06 | 2006-10-11 | 日産自動車株式会社 | 車両用報知装置 |
| US6370454B1 (en) * | 2000-02-25 | 2002-04-09 | Edwin S. Moore Iii | Apparatus and method for monitoring and maintaining mechanized equipment |
| US6285930B1 (en) * | 2000-02-28 | 2001-09-04 | Case Corporation | Tracking improvement for a vision guidance system |
| US6980092B2 (en) * | 2000-04-06 | 2005-12-27 | Gentex Corporation | Vehicle rearview mirror assembly incorporating a communication system |
| US20020103622A1 (en) * | 2000-07-17 | 2002-08-01 | Burge John R. | Decision-aid system based on wirelessly-transmitted vehicle crash sensor information |
| US6721644B2 (en) * | 2000-08-02 | 2004-04-13 | Alfred B. Levine | Vehicle drive override subsystem |
| US6356812B1 (en) * | 2000-09-14 | 2002-03-12 | International Business Machines Corporation | Method and apparatus for displaying information in a vehicle |
| US6564127B1 (en) * | 2000-10-25 | 2003-05-13 | General Motors Corporation | Data collection via a wireless communication system |
| US7353897B2 (en) * | 2003-07-23 | 2008-04-08 | Fernandez Dennis S | Telematic method and apparatus with integrated power source |
| US7188012B2 (en) * | 2004-08-24 | 2007-03-06 | Ford Global Technologies, Llc | Adaptive voice control and vehicle collision warning and countermeasure system |
| US20060215821A1 (en) * | 2005-03-23 | 2006-09-28 | Rokusek Daniel S | Voice nametag audio feedback for dialing a telephone call |
-
2001
- 2001-10-12 US US09/976,989 patent/US7565230B2/en not_active Expired - Lifetime
- 2001-10-15 EP EP01981576A patent/EP1326759B8/de not_active Expired - Lifetime
- 2001-10-15 JP JP2002534102A patent/JP2004518461A/ja active Pending
- 2001-10-15 AT AT01981576T patent/ATE346764T1/de not_active IP Right Cessation
- 2001-10-15 ES ES01981576T patent/ES2275748T3/es not_active Expired - Lifetime
- 2001-10-15 KR KR10-2003-7005223A patent/KR20030070889A/ko active Search and Examination
- 2001-10-15 WO PCT/US2001/032104 patent/WO2002030700A2/en active Search and Examination
- 2001-10-15 DE DE60124937T patent/DE60124937T2/de not_active Expired - Lifetime
-
2008
- 2008-05-28 JP JP2008139779A patent/JP2008282022A/ja active Pending
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8275348B2 (en) | 2008-05-30 | 2012-09-25 | Volkswagen Ag | Method for managing telephone calls in a vehicle |
| DE102009018074B4 (de) | 2008-05-30 | 2019-10-17 | Volkswagen Ag | Verfahren zum Verwalten von Telefonanrufen in einem Fahrzeug |
| DE102010044449B4 (de) * | 2009-12-31 | 2014-05-08 | Volkswagen Ag | Erkennen des Grades der Fahrfähigkeit des Fahrers eines Kraftfahrzeugs |
| DE102010018331A1 (de) * | 2010-04-27 | 2011-10-27 | Gm Global Technology Operations Llc (N.D.Ges.D. Staates Delaware) | Vorrichtung und Verfahren zum Erkennen einer Gefahrensituation für ein Fahrzeug |
| DE102013203910A1 (de) * | 2013-03-07 | 2014-09-11 | Bayerische Motoren Werke Aktiengesellschaft | Datenverarbeitungssystem und Verfahren zum Verarbeiten von Trainingsdaten eines Fahrertrainings für Kraftfahrzeuge |
| US10083625B2 (en) | 2013-03-07 | 2018-09-25 | Bayerische Motoren Werke Aktiengesellschaft | Data processing system and method for processing training data relating to the training of motor vehicle drivers |
| DE102014006668A1 (de) | 2014-05-07 | 2014-10-30 | Daimler Ag | Verfahren zur Unterstützung eines Fahrers beim Fahren eines Fahrzeugs |
| DE102016218719A1 (de) * | 2016-09-28 | 2018-03-29 | Robert Bosch Gmbh | Verfahren und Steuereinheit zur Fahreridentifikation, sowie Fahreridentifikationssystem |
| US10937334B2 (en) | 2017-01-31 | 2021-03-02 | Honda Motor Co., Ltd. | Information providing system |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1326759B1 (de) | 2006-11-29 |
| ES2275748T3 (es) | 2007-06-16 |
| EP1326759A2 (de) | 2003-07-16 |
| ATE346764T1 (de) | 2006-12-15 |
| JP2004518461A (ja) | 2004-06-24 |
| WO2002030700A3 (en) | 2002-09-12 |
| US20020091473A1 (en) | 2002-07-11 |
| KR20030070889A (ko) | 2003-09-02 |
| EP1326759B8 (de) | 2008-04-23 |
| WO2002030700A8 (en) | 2002-12-27 |
| DE60124937D1 (de) | 2007-01-11 |
| JP2008282022A (ja) | 2008-11-20 |
| US7565230B2 (en) | 2009-07-21 |
| WO2002030700A2 (en) | 2002-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE60124937T2 (de) | Verfahren und gerät zur verbesserung des fahrerverhaltens in einem fahrzeug | |
| DE60115940T2 (de) | Verfahren und vorrichtung zur beurteilung und verbesserung der leistung eines fahrzeugführers | |
| DE60115693T2 (de) | System und verfahren zur fahrerleistungsverbesserung | |
| EP1330377B8 (de) | Verfahren für eine syntheseantwort in einem fahrer-assistenzsystem | |
| US20020151297A1 (en) | Context aware wireless communication device and method | |
| US7292152B2 (en) | Method and apparatus for classifying vehicle operator activity state | |
| DE102017113447A1 (de) | Fahrverhaltensanalyse basierend auf einer Fahrzeugbremsung | |
| DE102019201407A1 (de) | Verfahren und Vorrichtung zum Steuern der Aufmerksamkeit eines Fahrers | |
| DE112021001776T5 (de) | Informationspräsentationsteuervorrichtung und Funktionssteuervorrichtung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 8364 | No opposition during term of opposition |