-
Technisches
Sachgebiet
-
Die
vorliegende Erfindung bezieht sich auf ein Verfahren und ein System
zum Steuern eines Verbrennungsmotors.
-
Hintergrund
-
Beim
Steuern von Dieselmotoren verwendet die herkömmliche Praxis elektronische
Steuereinheiten, die einen flüchtigen
und nicht flüchtigen
Speicher, eine Eingabe- und Ausgabetreiberschaltung und einen Prozessor,
der dazu geeignet ist, einen gespeicherten Anweisungssatz auszuführen, um
die verschiedenen Funktionen des Motors und seiner zugeordneten
Systeme zu steuern, besitzt. Eine bestimmte elektronische Steuereinheit
steht mit zahlreichen Sensoren, Aktuatoren und anderen elektronischen
Steuereinheiten in Verbindung, die dazu notwendig sind, verschiedene
Funktionen zu steuern, die verschiedene Aspekte einer Kraftstoffzufuhr,
einer Getriebesteuerung, oder unzähliger anderer, zu steuern.
-
Frühe komplexe
Systeme und Untersysteme, die kritische Funktionen durchführten, erforderten
separate Steuereinheiten, die unmittelbar auf dynamische Fahrzeugsituationen
ansprechen konnten und geeignete Vorgänge einleiten konnten. Zum
Beispiel konnte ein Fahrzeug eine Bremssteuereinheit, ein Fahrsteuermodul, eine
Kühlgebläsesteuereinheit,
eine Motorsteuereinheit und eine Getriebesteuereinheit eingesetzt
haben, so dass jedes Fahrzeugsystem und -untersystem seine eigene,
selbstständige
Steuereinheit besaß.
Diese Steuereinheiten waren entweder elektronische Steuereinheiten
oder elektronische Schaltungen, die nur eine geringe oder keine
Kommunikation unter sich selbst oder mit einer Mastersteuereinheit
besaßen.
Demzufolge wurde das Fahrzeug wie ein verteiltes Steuersystem betrieben,
was es oftmals schwierig machte, die gesamte Fahrzeugleistung durch
eine koordinierte Steuerung der verschiedenen Systeme und Untersysteme
zu optimieren.
-
Als
Steuersysteme anspruchsvoller wurden, wurden die verschiedenen verteilten
Steuereinheiten verbunden, um Status-Informationen zu übermitteln
und Aktionen zu koordinieren. Allerdings waren Übermittlungsverzögerungen
von Zwischen-Steuereinheiten oftmals nicht für kritische Steueraufgaben
akzeptabel, was demzufolge unabhängige
Prozessoren oder Schaltungen für
diese Aufgaben erforderte. Dies erweiterte die gesamten Fähigkeiten
des Steuersystems und war oftmals notwendig, um die erhöhten Anforderungen
des Verbrauchers ebenso wie strengere Standards für die Emissionskontrolle
zu erfüllen.
Um diese strikteren Standards zu erfüllen, ist es notwendig geworden,
die Fähigkeiten
des Motor-Steuersystems auf eine genauere Steuerung des Motorbetriebs
zu erweitern. Die Komplexität
der sich ergebenden Steuersysteme haben oftmals zu einer Schwierigkeit
bei der Herstellung, bei der Montage und bei der Wartung von Fahrzeugen
geführt. Hersteller
haben versucht, die Zunahme der Teile zu verringern, während die
Genauigkeit der Steuerung erhöht
wurde, indem zunehmend mehr Steuerfunktionen in eine einzelne Steuereinheit
kombiniert wurden.
-
Fortschritte
in der Mikroprozessor-Technologie haben die Entwicklung von Motor-Steuersystemen erleichtert.
Diese Systeme begannen durch Umsetzen relativ einfacher Steuerfunktionen
mit mechanischen Vorrichtungen und gingen zu komplizierteren Steuer-Schemata mit dazu
zugehörigen
Steuereinheiten über,
bevor sie zu komplexen Steuer-Strategien,
realisiert durch eine umfassende Motor-Steuereinheit, ausgereift
waren. Viele Motor-Steuersysteme, die im Stand der Technik vorgefunden
werden, wenden sich nur einer einzelnen Untersystem-Steuerstrategie
zu und können
nicht die Vorteile aktivieren, die durch diese Fortschritte von
Mikroprozessoren geboten werden. Eine andere Schwierigkeit, die
bei traditionellen, verteilten Motor-Steuersystemen vorgefunden
wird, ist die Unfähigkeit,
den Motor oder die Motor-Komponenten gegen Systemfehler zu schützen. Bestimmte
Motor-Komponenten, die unter extremen Betriebsbedingungen betrieben
werden, können
ausfallen.
-
Der
Wunsch, einsatzspezifische Fahrzeuge unter einem wettbewerbsfähigen Preis
zu schaffen, hat dazu geführt,
dass eine Anzahl von Verbraucheroptionen verfügbar ist, die einige der Systeme
umfassen können,
die vorstehend angeführt
sind, wie beispielsweise Fahrzeug-Geschwindigkeitsregelung, Motor-Geschwindigkeitssteuerung
oder Mo tor-Drehmomentsteuerung. Dies hat wiederum zu einer großen Anzahl
von möglichen
Untersystem-Kombinationen geführt,
was folglich die Kosten, die der Herstellung und der Montage zugeordnet
sind, ebenso wie die Kosten des Kundendienstes aufgrund der großen Anzahl
von Ersatzteil-Komponenten, die hergestellt und gelagert werden
müssen,
erhöht.
-
Es
ist erwünscht,
eine elektronische Steuereinheit zu haben, die dazu geeignet ist,
die Steuerung von verschiedenen Motorfunktionen und zugeordneten
Fahrzeugsystemen zu integrieren, um so Übermittlungsverzögerungen
zwischen Steuereinheiten zu beseitigen und die Motorsteuerung mit
anderen Fahrzeug-Untersystemen zu harmonisieren. Ein zusätzlicher
Vorteil ergibt sich aus dem Ersetzen unabhängiger, selbständiger Steuereinheiten
gegen eine übergreifende
Steuereinheit, um so eine Zunahme der Teile bei der Fahrzeug-Herstellung,
der Montage und in Wartungsumgebungen zu verringern, was zu einer
damit verbundenen Verringerung der Kosten dieser Funktionen führt.
-
Es
ist auch bei einer Optimierung der gesamten Fahrzeugleistung erwünscht, eine
elektronische Steuereinheit zu haben, die eine Steuerung des Motors
mit einer Steuerung des Getriebes für ein weicheres, effizienteres
Schalten des Getriebes koordiniert. Es ist erwünscht, eine Drossel-Logik zu
schaffen und ein Ausbalancieren der Zylinder zu schaffen, um eine
relative Leistungsverteilung von jedem Zylinder zu bestimmen.
-
Aufgrund
zunehmender Kosten des Kraftstoffs ist es weiterhin erwünscht, eine
Steuereinheit zu schaffen, die bestimmte Antriebstechniken fördert, die
die Kraftstoff-Ökonomie
erhöht.
Zum Beispiel ist es erwünscht,
einen Anreiz zu geben, den Motor-Leerlauf
zu begrenzen, während
sich das Fahrzeug in Ruhe befindet, um so die durchschnittlichen
Geräuschpegel
zu verringern und den Kraftstoffverbrauch zu verringern. Es ist
weiterhin erwünscht,
die Verwendung eines Tempomats zu fördern, um ein Schalten des
Getriebes zu minimieren und die gesamte Kraftstoff-Ökonomie
immer dann, wenn es möglich
ist, zu erhöhen.
-
Es
ist auch erwünscht,
eine Steuereinheit zu schaffen, die den Motor in einer Art und Weise
steuern kann, die die Motor-Komponenten während extremer Betriebszustände schützt. Zum
Beispiel wenn ein turbogeladenes Fahrzeug in großen Höhen gefahren wird, wird der
Turbolader schneller drehen als ein ähnlicher Turbolader, der in
geringeren Höhen
betrieben wird, und er kann beschädigt werden.
-
PATENT
ABSTRACTS OF JAPAN vol. 0070, no. 89 (M-207), 13. April 1983 (1983-04-13)-&
JP 58 013119 A offenbart
den Betrieb des Kühllüfters
2 eines
Motors mit einem Retarder entsprechend dem „Ein" Zustand des Retarder-Schalters und
der Kühlmitteltemperatur.
-
Die
DE 30 18 076 A offenbart
ein Steuern eines Lüfters
eines Kühlsystems
eines Verbrennungsmotors ensprechend der erfassten Umgebungstemperatur
und basierend auf anderen Motor-Betriebsparametern, um so ein vorhergesagtes,
maximales, gefordertes Motor-Abtriebsdrehmoment zu bestimmen und
den Lüfter
entsprechend zu betreiben, um den Motor unter Vorausschau des erwarteten,
maximalen Drehmoments und des damit verbundenen Anstiegs in der
Kühlwassertemperatur
zu kühlen.
-
Zusammenfassung
der Erfindung
-
Es
ist deshalb eine Aufgabe der vorliegenden Erfindung, eine Motorsteuereinheit
zu schaffen, die einen Motor, der einen Getriebe-Retarder bzw. eine
Getriebe-Bremse, einen Radiator und einen Kühllüfter besitzt, steuert. Diese
Aufgabe wird durch die Merkmale nach den Ansprüchen gelöst.
-
Kurze Beschreibung
der Zeichnungen
-
1 zeigt
ein Blockdiagramm eines integrierten Steuersystems für einen
Verbrennungsmotor;
-
2 zeigt
ein Flussdiagramm, das im Detail die Schritte eines Testens der
Zylinder-Balance angibt;
-
3 zeigt
ein Flussdiagramm, das im Detail die Schritte eines Hinzufügens einer
Kraftstoff-Ökonomie-Geschwindigkeitsbegrenzung
angibt;
-
4 zeigt
eine grafische Darstellung der Höhen-Drehmomentverringerung
als eine Funktion des barometrischen Drucks und der Motor-Geschwindigkeit;
-
5 zeigt
ein Flussdiagramm, das im Detail die Drossel-Logik angibt;
-
6 zeigt
ein Flussdiagramm, das im Detail die Gangverhältnis-Drehmomentbegrenzungs-Strategie darstellt;
-
7 zeigt
ein Flussdiagramm, das ein System und ein Verfahren für ein Abschalten
des Motor-Leerlaufs basierend auf einer Umgebungslufttemperatur
darstellt;
-
8 zeigt
eine grafische Darstellung eines Systems und eines Verfahrens für die Abschätzung der Umgebungslufttemperatur;
und
-
9 zeigt
eine grafische Darstellung des absoluten Drehmoments gegenüber der
Motor-Geschwindigkeit zur Verwendung bei der Lufttemperatur-Drehmomentbegrenzung.
-
Beste Moden
zum Ausführen
der Erfindung
-
In 1 nun
ist ein elektronisches Steuermodul (ECM) 20 dargestellt,
das mit einer typischen Motor-Baugruppe, allgemein bezeichnet mit
dem Bezugszeichen 22, und einer Benutzer-Schnittstelle 34 in
Verbindung steht. Das ECM 20 umfasst, wie dargestellt ist,
einen Mikroprozessor 24, der einen flüchtigen Random-Access-Memory
(RAM) 26 und einen nicht flüchtigen Read-Only-Memory (ROM) 28 besitzt.
Das ECM 20 kann natürlich
andere Typen eines Speichers an Stelle des RAM 26 und des
ROM 28, oder zusätzlich
dazu, enthalten, wie beispielsweise Flash-EPROM- oder EEPROM-Speicher,
wie dies im Stand der Technik bekannt ist.
-
Der
ROM 28, oder ein anderer, nicht flüchtiger Speicher, kann Anweisungen
enthalten, die ausgeführt werden,
um verschiedene Steuer- und Informationsfunktionen vorzunehmen,
ebenso wie Daten-Tabellen, die Kalibrierungswerte und Parameter
enthalten, die einen normalen Motorbetrieb charakterisieren. Der
Mikroprozessor 24 führt
Steuersignale zu Eingabe- und Ausgabe-(I/O)-Treibern 32 und
empfängt
sie davon. Die I/O-Treiber 32 stehen mit der Motor-Baugruppe 22 in
Verbindung und dienen dazu, die Steuereinheit gegen schädliche,
elektrische Impulse zu schützen,
während
die Signale und der Strom, notwendig für die Motor-Steuerung gemäß der vorliegenden
Erfindung, bereitgestellt werden. Die ECM-Baugruppe, die detailliert vorstehend
angegeben ist, ist über
Daten-, Adressen und Steuerbusse verbunden. Es sollte angemerkt
werden, dass eine Vielfalt von anderen möglichen Steuer-Schemata vorhanden
ist, die verschiedene Kombinationen von Mikroprozessoren und elektrischen
oder elektronischen Schaltungen umfassen, die dieselbe Funktion
durchführen
könnten.
-
Wie
weiterhin 1 zeigt, umfasst die Motor-Baugruppe 22 eine
Anzahl von elektronischen Einspritzeinheiten (Electronic Unit Injectors – EUI) 40,
wobei jede davon einem bestimmten Motor-Zylinder zugeordnet ist;
und eine Anzahl Sensoren 42 zum Anzeigen verschiedener
Motor-Betriebszustände,
wie beispielsweise Kühlmitteltemperatur,
Umgebungslufttemperatur, Ansaugverteiler-Lufttemperatur, Ansaug-Temperatur,
Motoröl-Temperatur, Kraftstoff-Temperatur,
Temperatur des Ladeluftkühlers,
Drosselposition, Ansaugverteilerdruck, Kraftstoffdruck, Öldruck,
Kühlmitteldruck,
Zylinderposition und Zylin derfolge, um nur ein paar zu nennen. Die Motor-Baugruppe 22 umfasst
auch Stellglieder 44, die Solenoide, variable Ventile,
Anzeigelichter, Motoren und/oder Generatoren umfassen können. Es
sollte ersichtlich sein, dass das ECM 20 auch in Verbindung
mit einer anderen Fahrzeug-Baugruppe und Mikroprozessoren stehen
kann, die zugeordnete Fahrzeugsysteme steuern, wie beispielsweise
die Bremsen, das Getriebe, ein Fahrzeug-Managementsystem oder einen Fuhrpark-Verwaltungs-Funktransponder.
-
Die
Benutzer-Schnittstelle, oder ein Daten-Hub 34 wird dazu
verwendet, durch einen Benutzer ausgewählte Überwachungs-Parameter und zugeordnete
Werte für
diese Parameter zu speichern und Wartungsintervalle zu bestimmen
und Trend-Analysen durchzuführen.
Durch den Benutzer ausgewählte
Parameter können
einstellbare Grenzen umfassen, wie beispielsweise die erwünschte Nutzungsdauer
des Motoröls.
Motor-Historik-Informationen
können
die diagnostischen Informationen, die verwendet werden, um ein personelles
Durchführen
einer Routine-Wartung oder die Fehlersuche von Fehlfunktionen zu
unterstützen,
ebenso wie Motor- und Fahrzeug-Betriebsdaten, die analysiert werden
können,
um das Verhalten des Fahrers des Fahrzeuges zusätzlich zu der Fahrzeugleistung
abzuschätzen,
umfassen. Die Benutzer-Schnittstelle 34 führt auch vorzugsweise
Bauteil-Lebensdauer- und Trend-Analysen durch, wie dies in größerem Detail
nachfolgend beschrieben ist. Es sollte ersichtlich werden, dass,
obwohl 1 die Benutzer-Schnittstelle so darstellt, dass
sie extern zu der ECM 20 vorliegt, bestimmte Operationen,
die durch die Benutzer-Schnittstelle durchgeführt werden, natürlich auch
durch die ECM 20 durchgeführt werden könnten.
-
Das
elektronische Steuermodul 20 führt eine Software aus, um so
die verschiedenen Merkmale der vorliegenden Erfindung umzusetzen.
Beim Beschreiben dieser Merkmale werden Gleichungen angegeben werden
und es wird Bezug auf Variablen genommen werden, die durch das ECM
beim Ausführen
der Software verwendet werden. Es sollte angemerkt werden, dass
die Gleichungs-Variablen, die in Italics in Kleinbuchstaben dargestellt
sind, Kalibrierungs-Variablen sind, wogegen Gleichungs-Variablen,
die in kleineren Werten (SMALL CAPS) dargestellt sind, Funktions-Variablen
darstellen, deren Werte variieren und die zum Beispiel auf Betriebszuständen, wie
beispielsweise Ansaug-Verteilerdruck
oder Motor-Geschwindigkeit, basieren.
-
In 2 nun
ist ein Flussdiagramm dargestellt, das im Detail die Schritte für einen
Einspritzdüse-Balance-Test
gemäß der vorliegenden
Erfindung angibt. In der bevorzugten Ausführungsform versucht das ECM 20 die
Einspritzdüsen 40 so
auszubalancieren, dass eine Leistungszuführung ungefähr gleich ist, indem ein Beschleunigungs-Test
durchgeführt
wird, um die relative Leistung von jeder Einspritzdüse zu bestimmen.
Am Schritt 50 bestimmt das ECM, ob der Beschleunigungs-Balance-Test
gestartet werden soll. In der bevorzugten Ausführungsform wird der Test dann
aktiviert, wenn die Einspritzdüse-Balance-Nachricht
durch das ECM 20 von der Benutzer-Schnittstelle 34 empfangen
ist und entweder die Fahrzeug-Geschwindigkeit Null ist oder der Fahrzeug-Geschwindigkeitssensor
(VSS) nicht konfiguriert ist und das Balance-Zeichen (BALENB) eingestellt ist.
Das BALENB Zeichen wird während
der Kalibrierung eingestellt. Der Beschleunigungs-Balance-Test kann in
einer Anzahl von Arten und Weisen beendet werden. Vorzugsweise wird
der Test dann beendet, wenn der Test abgeschlossen ist oder wenn
das ECM 20 eine Clear-Nachricht von der Benutzer-Schnittstelle 34 empfängt. Zusätzlich wird
der Test dann beendet, wenn die Zündung auf die „aus" Position gedreht
wird oder wenn die Fahrzeug-Geschwindigkeit nicht Null ist.
-
Wie
weiterhin 2 zeigt, wird, wenn einmal der
Balance-Test am Schritt 50 aktiviert ist, eine Testfolge am
Schritt 52 eingegeben, die einen Initialisierungsschritt
umfasst, während
dem die Leerlauf-Geschwindigkeit auf den Wert von BALSTR, eine Variable,
die die Balance-Start-Anfahr-RPM (die Motordrehzahl U/min (RPM), bei
der der Test beginnt) darstellt, eingestellt wird. BALSTR besitzt
vorzugsweise einen Bereich von 0-2.500 RPM (U/min) und gibt 1.000
RPM (U/min) vor. Zusätzlich
wird das geforderte Drehmoment auf Null eingestellt und die Test-Zylinder-Variable
(CYLTST) wird auf einen Wert von „1" am Schritt 52 eingestellt.
-
Am
Schritt 54 wird dem Motor ermöglicht, sich zu stabilisieren,
bevor der tatsächliche
Test beginnt. Während
der Stabilisierungs-Periode wird der Test-Zylinder von dem Kraftstoff-Versorgungs-Schema
abgetrennt. Der Steuerfluss schreitet zu Schritt 56 fort,
wenn die Stabilisierungszeit die eingestellte Zeit-Variable (BALTIM) übersteigt
oder gleich dazu ist, die einen Bereich von 0-30 Sekunden und einen
Vorgabewert von 2 Sekunden besitzt.
-
Wie
in 2 dargestellt ist, wird, wenn einmal der Motor
stabilisiert ist, am Schritt 56 die Beschleunigungs-RPM,
mit dem Test-Zylinder herausgenommen, gemessen, beginnend mit dem
ersten Zylinder herausgenommen. Um dies vorzunehmen, wird das Kraftstoff-Steuersignal,
das ein Impulsbreiten-Signal sein könnte oder von dem Drehmo ment
abgeleitet sein könnte,
für die
verbleibenden Einspritzdüsen
auf den Wert von BALFPW eingestellt, und die Zeit des Beginnens
eines Einspritzens (Beginning of Injection – BOI) für die verbleibenden Einspritzdüsen wird
auf BALBOI eingestellt, wobei BALFPW die Balance-Impulsbreite-Variable
ist, die einen Bereich von 0° – 30° und einen
Vorgabewert von 13° (der
Kurbelwellendrehung) besitzt, und wobei BALBOI der Balance-Beginn
der Kraftstoff-Einspritz-Variablen ist, die einen Bereich von 0° – 30° und einen Vorgabewert
von 10° besitzt.
-
Der
Steuerfluss geht vorzugsweise zu Schritt 58 der 2,
wenn die Anzahl der tatsächlichen
Motor-Umdrehungen, seit die Impulsbreite und die Einspritzzeit eingestellt
wurden, gleich zu BALREV ist oder dies übersteigt, wobei die Variable
die Balance-End-Anfahr-RPM
darstellt, die einen Bereich von 0-100 Umdrehungen mit einer Auflösung von
1 Umdrehung und einem Vorgabewert von 8 Umdrehungen besitzt. Der Wert
von BALREV wird so eingestellt, um das Auftreten einer bestimmten
Anzahl von Zündungen
für den
Test sicherzustellen. Wie bekannt ist, zünden bei einem Viertakt-Achtrylinder-Motor
vier Zylinder bei jeder Kurbelwelten-Umdrehung, wogegen alle acht
Zylinder bei jeder Umdrehung in einem Zweitakt-Achtzylinder-Motor
gezündet
werden. Mit BALREV und BALFPW auf die angezeigten Vorgaben eingestellt,
wird eine Erhöhung
der Motor-Geschwindigkeit von ungefähr 500 RPM während des
Tests realisiert werden. An diesem Punkt (revs ≥ BALREV) wird die Motor-Geschwindigkeit
in dem Speicher für
das Abschalten der Einspritzdüse
gespeichert.
-
Am
Schritt 58 der 2 bestimmt das ECM, ob eine
zusätzliche
Einspritzdüse
getestet werden muss oder nicht und ob der Einspritzdüse-Balance-Test
abgeschlossen ist. Falls der Wert von CYLTST die
Anzahl von Motor-Zylindern (ZNZYLH) übersteigt oder gleich dazu
ist, müssen
keine zusätzlichen
Einspritzdüsen
getestet werden und der Steuerablauf springt weiter zu Schritt 62,
wo Einstellungsfaktoren bestimmt werden. Falls allerdings zusätzliche
Einspritzdüsen
getestet werden müssen,
wird der Wert von CALTST am Schritt 60 erhöht und der
Steuerablauf kehrt zu Schritt 54 zurück, so dass die Schritte 56 und 58 für jede Einspritzdüse, die
getestet werden soll, wiederholt werden können.
-
Wie
weiterhin
2 zeigt, werden am Schritt
62 Einstellungsfaktoren
berechnet, nachdem alle Einspritzdüsen, die getestet werden sollen
(d.h. ausgeschaltet), getestet worden sind. In einer bevorzugten
Ausführungsform
umfasst dies zuerst ein Bestimmen eines durchschnittlichen RPM (RPM
AVG) für
die getesteten Einspritzdüsen
entsprechend zu
wobei Σ(RPM) die Summe aller RPMs (U/min),
gemessen an der Schlussfolgerung des Schritts
56, ist.
Als nächstes
wird ein Einstellungs-RPM-Verhältnis
(RPM
ADJX) für jeden Zylinder entsprechend
zu
für x = 1 bis 8 für einen
Acht-Zylinder-Motor bestimmt, wobei RPM
X die
RPM, gemessen an der Schlussfolgerung des Schritts
56 für den bestimmten
Zylinder, ist. Die Einstellungsfaktoren (FCT
ADJX),
die letztendlich die abschließende
Einspritzdüsen-Impulsbreite modifizieren
werden, werden entsprechend zu
FCTADJX =
(RPMADJX – 1)·(ZYNCYLH – 1)·BALGANbestimmt, wobei
BALGAN die Balance-Verstärkung
ist, die einen Bereich von 0 – 2
mit einem Vorgabewert von 0,8 besitzt. Ein temporärer Einstellungsfaktor
(FCT
TMPX) wird dann entsprechend zu
FCTTMPX = min(BALLIM,max(–BALLIM,
(FCTADJ(x-1) + FCTADJX)))bestimmt,
wobei BALLIM eine Balance-Grenze darstellt, die einen Bereich von
0-1 mit einer Auflösung
von 0,01 und einem Vorgabewert von 0,07 besitzt. Demzufolge identifiziert,
um den temporären
Einstellungsfaktor zu bestimmen, das ECM zuerst das Maximum von –BALLIM
und die Summe von FCT
ADJX(x-1) und FCT
ADJX (wobei FCT
ADJX(x-1) der
vorherige Einstellungsfaktor für
diesen Zylinder ist). Das ECM vergleicht dann das Maximum mit dem
Wert von BALLIM und nimmt das Minimum dieser Größen als den temporären Einstellungsfaktor.
-
Am
Schritt
64 werden die Einstellungsfaktoren aktualisiert
und die Ergebnisse werden zu dem Benutzer ausgegeben. In der bevorzugten
Ausführungsform
umfasst ein Aktualisieren der Einstellungsfaktoren ein Normieren
der berechneten Einstellungsfaktoren. Eine Normierung der Einstellungsfaktoren
wird unter Verwendung eines Normierungsfaktors vorgenommen, der
entsprechend zu
FCTNRMX = Π(1 +FCTTMPX) bestimmt wird. Demzufolge wird
FCT
NRMX erhalten, indem das Produkt aller
(1 + FCT
TMPX) Größen herangezogen wird. Der
Einstellungsfaktor der Kraftstoff-Einspritzdüse-Impulsbreite für jeden Zylinder kann dann
entsprechend zu
bestimmt werden.
-
Wenn
einmal am Schritt 64 alle Einstellungsfaktoren für die abgeschalteten
Zylinder (d.h. alle Werte von FCTX) bestimmt
sind, werden diese in dem Speicher gespeichert und dann mit der
End-Einspritzdüsen-Impulsbreite BALFPW = PWMULT·INCFACX·FCX·SPWmultipliziert,
wobei PWMULT eine motorspezifische Leistungs-Einstellungskonstante, gespeichert in
dem nicht flüchtigen
Speicher, ist, INCFACX die Einspritzdüsen-Kraftstoff-Strömungsrate
ist, und SPW die Basis-Kraftstoff-Impulsbreite, bestimmt durch das
ECM basierend auf Betriebszuständen
und bekannten Prinzipien einer Zündung
und Verbrennung, ist. Die Methodologie könnte, obwohl es nicht spezifisch
in 2 dargestellt ist, unter Verwendung von mehreren
Iterationen der Schritte durchgeführt werden.
-
Es
ist bekannt, dass bestimmte Kraftstoff-Einspritzdüsen, manchmal
bezeichnet als Hoch-Kraftstoff oder Heiß-Einspritzdüsen, mehr
Leistung als andere Einspritzdüsen
erzeugen. Mit dem Balance-Test der vorliegenden Erfindung können die
Effekte dieser Variation durch Kompensieren der Kraftstoff-Zufuhr
jeder Kraftstoff-Einspritzdüse
minimiert werden. Zum Beispiel wird, wenn der Motor eine Einspritzdüse mit hohem
Ausstoß besitzt,
wenn diese Einspritzdüse
abgeschaltet ist, der zugeordnete Anstieg in der Motor-Geschwindigkeit,
der von dem Balance-Test resultiert, geringer sein als der Anstieg
in der Motor-Geschwindigkeit, der dann auftritt, wenn die Einspritzdüse mit hohem
Austritt mit Kraftstoff versorgt wird und eine nominale Einspritzdüse abgeschaltet
ist. Einstellungsfaktoren kompensieren eine Einspritzdüse mit hohem
Ausstoß,
indem der Kraftstoff, der zu dieser Einspritzdüse zugeführt wird, verringert wird.
Durch Kompensieren der Kraftstoff-Einspritzdüsen arbeitet die vorliegende
Erfindung so, um eine Motor-Abnutzung zu verringern, den Umfang
eines Motor-Abgases und Teilchen, die erzeugt sind, zu verringern
und eine ausgeglichenere Leistungsabgabe zu erzielen. Es sollte
ersichtlich werden, dass die für
die Einspritzdüse
spezifischen Informationen, die vorstehend beschrieben sind, in
der Benutzer-Schnittstelle 34 oder in dem ECM 20 für Motor-Diagnostiken
und Protokollierungszwecke aufgesucht und/oder verglichen werden
können.
-
In 3 nun
ist ein Flussdiagramm dargestellt, das im Detail die Schritte eines
Kraftstoff-ökonomie-Geschwindigkeits-Begrenzungs-Addierers
gemäß der vorliegenden
Erfindung zeigt. Das Ziel dieses Aspekts der vorliegenden Erfindung
ist es, dem Fahrer des Fahrzeugs einen Anreiz zu geben, sich in
einer Art und Weise zu verhalten, die allgemein mit den Zielen der
Fuhrpark-Verwalter übereinstimmt,
eine Kraftstoff-Ökonomie
zu maximieren. Typischerweise bemühen sich Fahrer, die Fahrzeug-Geschwindigkeit
zu erhöhen.
Im Hinblick hierauf führt
ein Erhöhen
der Geschwindigkeit, die für
den Fahrer verfügbar
ist, wenn sich die Kraftstoff-Ökonomie
als eine Folge von zum Beispiel einer Minimierung der Leerlaufzeit,
einer Auswahl des optimalen Getriebegangs, Beibehalten einer stabilen
Drosselung, oder einer Verringerung der Benutzung der durch den
Motor angetriebenen Zusatzgerätelasten
erhöht,
zu einem wirkungsvollen Anreiz für
den Fahrer, sich so zu verhalten, wie dies erwünscht ist.
-
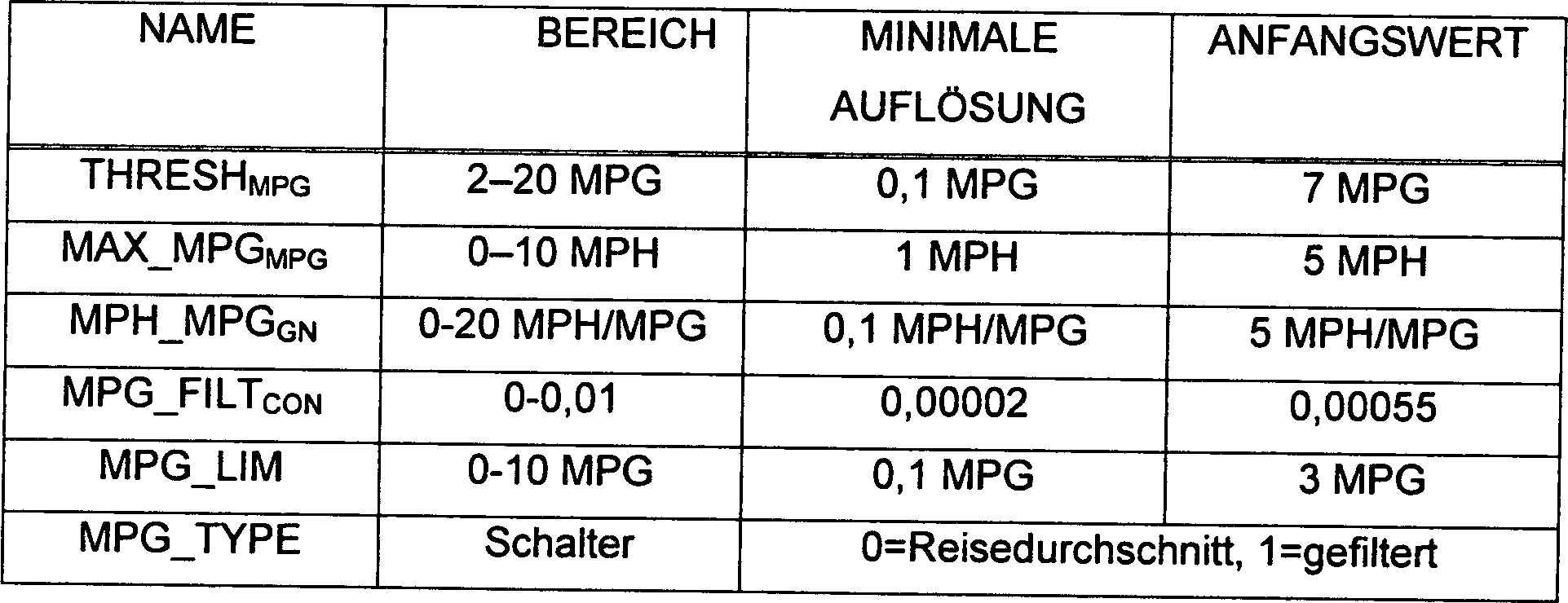
Die
Strategie, um den auf einer Geschwindigkeit basierenden Anreiz zu
erzielen, verwendet zahlreiche Variablen. In der bevorzugten Ausführungsform
sind Kalibrierungswerte für
diese Variablen wie folgt:
-
Eine
Kraftstoff-Ökonomie,
gemessen in Angaben von Meilen pro Gallone (MPG), kann entweder
die Fahrt-Durchschnitts-Kraftstoff-Ökonomie (MPG_TYPE = 0) oder
eine gefilterte Kraftstoff-Ökonomie (MPG_TYPE
=1) sein. In einer bevorzugten Ausführungsform wird das gefilterte
MPG (FILMPG) verwendet und wird am Schritt 70 unter
Verwendung einer Standard-Verzögerungs-Berechnung
1ter Ordnung, begrenzt zwischen Kalibrierungsgrenzen,
entsprechend zu FILMPG =
min(MPG_LIM + THRESHMPG,max(THRESHMPG – MPG_LIM,
(FILMPGt-1 + MPG_FILTCON·(INSTMPG – FILMPGt-1)))), berechnet,
wobei MPG_LIM die maximale, zulässige
Abweichung von dem Ziel für
die Fuhrpark-Kraftstoff-Ökonomie
darstellt, THRESHMPG eine Schwellwert-Kraftstoff-Ökonomie darstellt, MPG_FILTCON eine Kraftstoff-Ökonomie-Filterkonstante ist,
INSTMPG eine momentane Kraftstoff-Ökonomie
darstellt und FILMPGt-1 die zuvor bestimmte,
gefilterte Kraftstoff Ökonomie
darstellt. Diese Berechnung wird häufig vorgenommen, wie beispielsweise
einmal pro Sekunde, um auf einer zeitlichen Basis auf das momentane
Verhalten des Fahrers zu reagieren.
-
Der
Term MPGMPH, der den Geschwindigkeits-Addierer darstellt, wird berechnet,
um eine zulässige Fahrzeug-Geschwindigkeit
zu erhöhen,
wenn einmal die Schwellwert-Kraftstoff Ökonomie
erreicht worden ist, obwohl sie auf den maximalen Geschwindigkeits-Kalibrierungswert
MAX_MPHMPG begrenzt ist. Genauer gesagt
wird die zulässige
Fahrzeug-Geschwindigkeit proportional entsprechend zu dem Betrag,
um den die Schwellwert-Kraftstoff-Ökonomie überschritten
wird, erhöht.
In einer bevorzugten Ausführungsform
wird der Term MPGMPH am Schritt 72 entsprechend zu MPGMPH = min(MAX_MPHMPH,MPH_MPGGN·max(0;
(INSTMPG- THRESHMPG)))bestimmt,
wobei MAX_MPHMPG den maximalen Betrag darstellt,
um den die Fahrzeug-Geschwindigkeit erhöht werden kann, und MPH_MPGGN die Kraftstoff-Ökonomie-Verstärkung ist, wobei der Wert davon
basierend auf der Kunden-Eingabe variieren kann. Der berechnete
MPG-Wert wird für
das Merkmal, um so zu arbeiten, wie dies vorgesehen ist, vorzugsweise über Zündzyklen
gesichert und auf Null in dem Fall des ersten Einschaltens oder
in dem Fall eines Fehlers initialisiert. Falls VSS ausfällt bzw.
fehlerhaft ist, wird der Geschwindigkeits-Addierer auf Null gesetzt.
Am Schritt 74 stellt das ECM die Geschwindigkeits-Maxima
ein. Genauer gesagt werden das Fahrgeschwindigkeits-Maximum MPH
(CCMAXS) und das Straßen-Geschwindigkeits-Begrenzungs-Maximum
MPH (RSLMPH) durch die Addition von MPGMPH zu CCMAXS und RSLMPH
modifiziert, wenn dieses Merkmal freigegeben ist.
-
Gemäß einem
anderen Aspekt der vorliegenden Erfindung ist die Kraftstoff-Zufuhr
zu dem Motor bei bestimmten Höhen
begrenzt. Das Ziel dieses Aspekts der vorliegenden Erfindung ist
es, eine Beschädigung des
Turboladers aufgrund einer zu großen Geschwindigkeit oder eines
Kompressors bei bestimmten, barometrischen Drücken (wie beispielsweise solche,
die typischerweise in großen
Höhen vorgefunden
werden), vorzugsweise durch Verringern der Leistung über eine
Drehmoment-Begrenzung bei diesen barometrischen Drücken, zu
verhindern.
-
In
einer bevorzugten Ausführungsform
ist ein Grenz-Drehmoment (HATQ) entsprechend zu:
definiert,
wobei RPM
MX das RPM (U/min) für eine maximale
Kompensation des barometrischen Drucks darstellt, die einen Bereich
von 0-2.500 mit einem Vorgabewert von 1.800 RPM besitzt, wobei RPM
die Motor-Geschwindigkeit ist, TRQ
MN das
maximale Drehmoment nach einer Kompensation darstellt, das einen
Bereich von 0-100 und eine Vorgabe von 100% besitzt, RPM
MN das maximale RPM für eine Kompensation darstellt, das
einen Bereich von 0-2500 und eine Vorgabe von 1100 RPM besitzt,
PR
TQ die Druckverstärkung zur Kompensation darstellt,
die einen Bereich von 0-2% pro kPa und einen Vorgabewert von 1 %
pro kPa besitzt, und PR
MN den minimalen
Druck für
eine Kompensation darstellt, das einen Bereich von 0-120 und einen
Vorgabewert von 50 kPa besitzt. Die Berechnungen werden durchgeführt und
die Drehmoment-Begrenzung wird auferlegt, wenn die Bedingungen für eine Drehmoment-Begrenzung
existieren, wie beispielsweise dann, wenn der barometrische Druck
unterhalb demjenigen ist, der ein Drehmoment liefert, das größer als
das momentane, geforderte Drehmoment ist, oder gleich dazu ist.
Es wollte angemerkt werden, dass die Variablen so kalibriert werden,
dass RPM
MX > RPM
MN gilt.
-
4 zeigt
eine grafische Darstellung der Drehmoment-Verringerung (d.h. Prozent
eines maximalen Motor-Abtriebs-Drehmoments) als eine Funktion der
Höhe und
der Motor-Geschwindigkeit. Die durchgezogenen Linien zeigen eine
typische, geforderte Drehmoment-Grenze, und Linien einer konstanten
Leistung, an. Begrenzte Drehmomente sind für barometrische Drücke von
0 kPa, 50 kPa, 72,86 kPa, 81,12 kPa und 100 kPa dar gestellt. Das
Drehmoment variiert, wie dargestellt ist, umgekehrt zu dem barometrischen
Druck (BARO), so dass eine stärkere
Drehmoment-Verringerung (geringeres Drehmoment) bei niedrigeren,
barometrischen Drücken
erzielt wird, die typischerweise bei hohen Höhen vorgefunden werden. Genauer
gesagt stellt die grafische Darstellung verschiedene Drehmoment-Reduktionen
für eine
bestimmte Motor-Anwendung dar, mit TRQMN =
57%, RPMMN = 1050 RPM, RPMMX =
2100 RPM, PRTQ = 0,0080 und PRMN =
50 kPa. Das Grenz-Drehmoment kann, wenn es bestimmt ist, als eine
globale Motor-Drehmoment-Begrenzung
auferlegt werden, wie vorstehend beschrieben ist.
-
Wie
zuvor angemerkt ist, wird die Benutzer-Schnittstelle oder der Daten-Hub 34 dazu
verwendet, Benutzer-Kalibrierungs-Parameter, Fuhrpark-Verwaltungs-Informationen
zu speichern und Motor-Historik-Informationen, die als eine Folge
von diagnostischen oder Fehlfunktions-Coden aufgezeichnet sind,
aufzusuchen. Der Daten-Hub 34 speichert vorzugsweise diese
Informationen in Sätzen,
die hier als Seiten bezeichnet werden, obwohl verschiedene andere
Verfahren einer Speicherung möglich
sind, wie beispielsweise ASCII Dateien. Die erste Seite bezieht
sich auf Fahrzeug-Informationen. In der bevorzugten Ausführungsform
umfasst die Fahrzeug-Informations-Seite die gesamte Fahrzeug-Kilometerleistung,
den gesamten Kraftstoff, der verwendet ist, die gesamten Motorbetriebsstunden
und die Motor-Seriennummer. Alle Werte werden von der ersten Benutzung
des Motors an beibehalten und können
nicht zurückgesetzt
werden.
-
Das
elektronische Steuermodul 20 kann verschiedene Sensoren
unter regelmäßigen Intervallen
unter kontrollierten Bedingungen abtasten oder es kann kontinuierlich
abtasten. Zum Beispiel kann die Kühlmittel-Temperatur kontinuierlich
abgefragt werden, wenn erwartet wird, dass der Motor die Betriebstemperatur
erreicht hat. Ein Studieren der Trend-Daten über eine Zeitperiode ergibt
eine Anzeige über
den Zustand des Elements, das gemessen wird, oder kann eine indirekte
Anzeige über
den Zustand der anderen Elemente des Motors liefern. Zum Beispiel
kann ein sich verringernder Durchschnitt für die Kühlmittel-Temperatur ein fehlerhaft
arbeitendes Thermostat anzeigen, wogegen ein Erhöhen der durchschnittlichen
Temperatur einen verstopften Kühler
anzeigen kann.
-
Dementsprechend
arbeitet das elektronische Steuermodul 20 mit dem Daten-Hub 34 so
zusammen, um eine Vielzahl von Trend-Seiten beizubehalten, allgemein
können
Trend-Informationen zurückgesetzt
werden, allerdings ist es die bevorzugte Praxis, zuzulassen, dass
die Trends kontinuierlich über
die Lebensdauer des Motors laufen. Auf diese Art und Weise ist eine
vorgegebene Anzahl von am kürzesten
vorher liegenden Abtastwerten, zum Beispiel 100, für Trend-Analysen
verfügbar.
Zu Zwecken dieser Diskussion können
die Werte, dargestellt durch die Buchstaben „aaa", „bbb", usw., durch einen
Benutzer spezifiziert sein, um Trend-Informationen kundenspezifisch
anzupassen, und der Wert innerhalb der Klammern nach den Buchstaben
zeigt den Vorgabewert an. Natürlich
können
die Vorgabewerte fest in das System codiert sein, um diesen Aspekt
von der Eingabe des Kunden wegzunehmen. Schließlich sollte angemerkt werden,
dass alle Trend-Seiten
zurückgesetzt
werden können.
Ein Zurücksetzen
wird alle Trend-Abtastwert-Punkte,
gespeichert auf einer bestimmten Seite, löschen.
-
Die
erste Trend-Seite, die geführt
wird, bezieht sich auf den Öldruck.
Ein Öldruck-Trend-Abtastwert wird
während
allen aaa(20) Motorbetriebsstunden überwacht. Der durchschnittliche Öldruck während des
Zeitintervalls der Abtastperiode, wo RPM bbb(1600) übersteigt,
allerdings geringer als ccc(1800) ist, und die Öltemperatur ddd(180°F) überstieg,
allerdings geringer als eee(220°F)
war, wird als der Abtastwert herangezogen. Die Start-Motor-Betriebsstunden,
an denen die Abtastperiode begann, wird auch gespeichert. Allgemein wird
der Öldruck-Trend
für eine
ungewöhnliche Änderung
im Druck, wie beispielsweise ein großer Abfall im Druck, überwacht.
Ein solcher Abfall im Druck kann für mechanische Probleme, ein
Regulierungs-Problem, eine Kraftstoff-Verdünnung
oder eine niedrige Menge an Öl
kennzeichnend sein.
-
Der
Daten-Hub führt
auch eine Turboladedruck-Trend-Seite. In der bevorzugten Ausführungsform
wird ein Turboladedruck-Trend-Abtastwert basierend auf allen aaa(20)
Motorbetriebsstunden bestimmt. Der durchschnittliche Turbo-Boost-Druck
während
des Zeitintervalls der Abtastperiode, wo das RPM größer als bbb(1400)
und geringer als ccc(1600) war und die Anforderung an den Antriebsstrang
größer als
oder gleich zu ddd(96%) und geringer als oder gleich zu eee(100%)
ist, wird als der Abtastwert herangezogen. Der Startpunkt, von dem
an die Abtastung begonnen wurde, wird auch in der Form von Motorbetriebsstunden
gespeichert. Der Turbo-Boost-Trend arbeitet dahingehend, dass Kraftstoff-Luftsystem
zu überwachen.
Allgemein zeigt sich eine Luftleckage selten als eine Verringerung
in dem Turbo-Boost. Ähnlich
zeigt sich eine Kraftstoff-Begrenzung (z.B. verstopfter Kraftstofffilter)
selbst in einer Verringerung des Turbo-Boosts.
-
Als
eine Maßnahme
zum Überwachen
des elektrischen Systems führt
der Daten-Hub 34 eine
Batteriespannungs-Trend-Seite. Ein Batteriespannungs-Trend-Abtastwert wird
alle aaa(20) Motorbetriebsstunden für eine Periode von bbb(60)
Minuten herangezogen. Die durchschnittliche Batteriespannung für die gesamte Zeit
in der Abtastperiode, wo RPM größer als
ccc(1600) war und geringer als ddd(1800) war, wird als der Abtastwert
herangezogen. Der Startpunkt der Abtastperiode wird auch gespeichert.
Allgemein kann eine ungewöhnliche
Erhöhung
in der Batteriespannung einen Fehler in dem Spannungsregler anzeigen,
wogegen eine ungewöhnliche
Abnahme in der Batteriespannung einen gerissenen Lichtmaschinen-Antriebsriemen
anzeigen kann.
-
Der
Daten-Hub führt
auch eine Kraftstoff-Ökonomie-Trend-Seite.
Ein Kraftstoff-Ökonomie-Trend
zieht einen Abtastwert alle aaa(20) Motorbetriebsstunden heran und
zeichnet die durchschnittliche Kraftstoff-Ökonomie zwischen dem letzten
Abtastwert und dem momentanen Abtastwert auf. Der Startpunkt der
Abtastperiode wird auch gespeichert.
-
Als
eine Maßnahme
zum Überwachen
des Öl-Kühlsystems
führt der
Daten-Hub 34 eine Trend-Seite für die maximale Öl-Temperatur.
Ein Abtastwert für
die maximale Öl-Temperatur wird über alle
aaa(20) Motorbetriebsstunden bestimmt. Die maximale Öl-Temperatur, die zwischen
der Zeit, zu der der letzte Abtastwert herangezogen wurde, und dem
momentanen Abtastwert erreicht ist, wird auf der Seite aufgezeichnet.
Der Startpunkt der Abtastperiode wird auch als kumulative Motor-Betriebsstunden
gespeichert. Eine Öl-Temperatur-Messung,
die einen Anstieg in der maximalen Temperatur anzeigt, kann für mechanische
Probleme des Motors kennzeichnend sein.
-
Zusätzlich wird
ein Kühlmittel-Temperatur-Abtastwert
alle aaa(20) Motorbetriebsstunden herangezogen. Die maximale Kühlmittel-Temperatur,
die zwischen der Zeit, zu der der letzte Abtastwert herangezogen wurde,
und dem momentanen Abtastwert erreicht ist, wird aufgezeichnet.
Der Punkt des Beginns der Motor-Betriebsstunden, von dem der Abtastwert
herangezogen wurde, wird auch gespeichert. Eine Kühlmittel-Temperaturmessung,
die einen Anstieg in der maximalen Temperatur anzeigt, kann für einen
verstopften Kühler,
eine Fehlfunktion des Thermostats oder Unregelmäßigkeiten in dem Kühlgebläse kennzeichnend
sein.
-
Der
Daten-Hub führt
auch eine Trend-Seite für
ein maximales RPM. Ein RPM-Abtastwert
wird alle aaa(20) Motorbetriebsstunden herangezogen und das maximale
RPM, das zwischen der Zeit erreicht ist, zu der der letzte Abtastwert
herangezogen wurde, und dem momentanen Abtastwert, wird auf der
Seite aufgezeichnet. Der Startpunkt der Abtastperiode wird in der
Form von kumulativen Motor-Betriebsstunden gespeichert. Über das
Führen
von Trend-Seiten eines maximalen RPM werden Fahrer-Vergleiche möglich.
-
Als
eine andere Maßnahme,
um Fahrer-Vergleiche vorzunehmen, führt der Daten-Hub auch Trend-Seiten über die
maximale Fahrzeug-Geschwindigkeit. Ein Geschwindigkeits-Abtastwert
wird alle aaa(20) Motorbetriebsstunden herangezogen. Er zeichnet
die maximale Geschwindigkeit, die zwischen der Zeit, zu der der
letzte Abtastwert herangezogen wurde, und dem momentanen Abtastwert
erreicht ist, zusätzlich
zu dem Startpunkt der Abtastperiode in der Form von kumulativen
Motor-Betriebsstunden auf.
-
Zusätzlich führt der
Daten-Hub 34 Trend-Seiten für die Sensor-Spannung der minimalen
Drosselposition. Es sollte ersichtlich werden, dass verschiedene
Typen von Drosselpositions-Sensoren, wie beispielsweise ein ratiometrischer
Sensor, verwendet werden können.
Ein Abtastwert für
die Drosselpositions-Spannung wird alle aaa(20) Motorbetriebsstunden
herangezogen. Die minimale Drosselpositions-Spannung, die zwischen
der Zeit, zu der der letzte Abtastwert herangezogen wurde, und dem
momentanen Abtastwert erreicht wird, wird, zusätzlich zu dem Startpunkt der
Abtastperiode, in der Form von kumulativen Motorbetriebsstunden aufgezeichnet.
Mit diesen Informationen kann eine Abnutzung des Drosselpositions-Sensors überwacht
werden. Allgemein verringert sich der Ausgang des Drosselpositions-Sensors
im Wert, wenn sich der Sensor abnutzt.
-
Zusätzlich zu
den Trend-Seiten, die in größerem Detail
vorstehend diskutiert sind, ist der Daten-Hub 34 in der
Lage, die Funktionsweise von Fahrzeug-Komponenten, wie beispielsweise
Motor-Komponenten, durchzuführen.
In einer bevorzugten Ausführungsform
können
bis zu 10 Komponenten unabhängig überwacht werden.
Während
der Einstellung von Informationen des elektronischen Steuermoduls 20 können die
Namen von 10 Komponenten, die überwacht
werden sollen, durch einen Bediener spezifiziert werden, d.h.. Ölfilter, Kühlmittel, Öl, und dergleichen.
Jede der Komponenten kann durch einen Mechanismus oder mehrere der
folgenden Mechanismen überwacht
werden: Fahrzeug-Distanz,
die gefahren ist, Motorbetriebsstunden, die benötigt sind, Kalenderzeit, Gesamtmotor-Umdrehungen,
gesamter Kraftstoff, der verbraucht ist, oder Leerlaufzeit. Die
Lebensdauer-Informationen werden auf einer Wartungs-Intervall-Seite
geführt,
die den Wert, der für die
Servicezeit eingestellt ist, und die gesamte Nutzung, die derzeit
verbraucht ist, für
jede der überwachten Motor-Komponenten,
eingestellt ist. Die Lebensdauer-Informationen
umfassen auch bevorzugt einen Prozentsatz der Lebensdauer, der ver bleibt,
ebenso wie das erwartete Austausch/Wartungs-Datum, basierend auf Fahrzeug-Nutzungsraten. Die
folgenden Komponenten können,
um nur ein paar zu nennen, als Standard für eine Komponenten-Lebensdauer
ausgewählt
werden: Ölfilter, Öl, Luftfilter,
Kraftstofffilter, und Kühlmittel.
Jede der einzelnen Komponenten, für die das Wartungsintervall
berechnet sind, kann zurückgesetzt
werden, so dass deren akkumulierte Benutzung auf Null gesetzt wird.
-
Die
Ereignis-Log-Seite liefert eine grobe Anzeige für die Benutzung des Motors.
In dem Ereignis-Log wird der Zustand des Motors für sechsundneunzig
(96) Viertelstunden-Intervalle
in einem Tag protokolliert. Das Ereignis-Log wird diese Informationen
für eine
vorbestimmte Anzahl von (den am kürzesten vorher liegenden) Tagen,
wie beispielsweise fünf
(5), beibehalten. Die nachfolgenden Informationen sind
bevorzugt verfügbar. Start-Datum und -Zeit,
End-Datum und -Zeit, Anzahl von Eingaben, und Eingabe (das das Einschalten,
Abschalten des Motors, den Leerlauf, und das Fahren anzeigt), für die 480
Viertelstunden-Eingabe. Falls der ECM-Takt nicht geeignet eingestellt
ist, oder die Stromversorgung abgeschaltet worden ist, kann diese
Seite nicht geeignete Ergebnisse angeben.
-
Zusätzlich zu
den Merkmalen, die vorstehend beschrieben sind, führt das
elektronische Steuermodul 20 auch eine Drosselsteuer-Logik
durch. Genauer gesagt bestimmt das elektronische Steuermodul 20 eine Drosselposition-Verstellung,
um so sicherzustellen, dass dann, wenn die Drossel vollständig freigegeben
ist, der Wert des Drosselposition-Sensors (TPS) Null ist, und um sicherzustellen,
dass der Wert auf Null unter Fehlerzuständen als eine Sicherheitsmaßnahme gebracht
wird. Ein zusätzlicher
Mechanismus arbeitet, wenn er eingerichtet ist, dahingehend, zu
verhindern, dass der Motor beschleunigt wird, wenn eine Fahrzeug-Tür offen ist.
-
Bei
dem Bestimmen des Versatzes der Drosselposition verwendet das elektronische
Steuernodul 20 einen impuls-gefilterten Versatz, einen
geglätteten
Versatz (Offset) und einen berechneten Versatz. Allgemein wird der
impuls-gefilterte Versatz durch Auswählen des mittleren Werts einer
Gruppe von (wie beispielsweise drei) Abtastwerten erhalten. Demzufolge
ist der Effekt derjenige, den höchsten
und den niedrigsten Abtastwert einer Gruppe von Abtastwerten auszusondern.
Der geglättete
Versatz wird unter Verwendung eines Verzögerungsfilters (Lag-Filters)
erster Ordnung erhalten. Der berechnete Versatz wird so erhalten,
wie dies nachfolgend beschrieben ist.
-
Wie
nun 5 zeigt, werden, an dem Beginn eines Zündzyklus,
der impulsgefilterte Versatz, der geglättete Versatz und der berechnete
Versatz auf den maximalen, physikalisch möglichen Ausgangswert (z.B. 1023)
initialisiert. Wenn sich die A/D-Wandlervorrichtung,
die dem TPS zugeordnet ist, in einem Konversions-Fehler-Zustand
befindet, oder wenn eine digitale Eingabe als ein Dual-Ansteuer-EFPA-Schalter
konfiguriert ist und sich der entzerrte Zustand dieser Eingabe ändert, was
eine Änderung
in dem aktiven TPS anzeigt (Schritt 80), dann werden, am
Schritt 82, der impuls-gefilterte Versatz, der geglättete Versatz
und der berechnete Versatz auf dem maximal physikalisch möglichen
groben Wert gehalten.
-
Wie
in 5 dargestellt ist, werden, wenn ein Sensorfehler
auf der niedrigen Seite oder ein Sensorfehler auf der hohen Seite
erfasst ist, oder wenn eine der digitalen Eingaben zu dem ECM 20 so
konfiguriert ist, um ein Türschalter
zu sein, und der entzerrte Zustand dieser Eingabe eine niedrige,
externe Eingabe darstellt, die eine offene Fahrzeugtür anzeigt
(Schritt 84), der impuls-gefilterte Versatz, der geglättete Versatz
und der Computer-Versatz auf dem maximalen, physikalisch möglichen
groben Wert am Schritt 86 gehalten.
-
Ansonsten
wird, bei jeder Konversion, der Ausgangswert des TPS-Ausgangs über das
Impuls-Rausch-Filter am Schritt 88 geführt, das, wie vorstehend beschrieben
ist, die am kürzesten
vorher liegenden drei Ausgangswerte beibehält und den arithmetischen Mittelwert
(Mitte) hindurch lässt.
Das Ergebnis, das das impuls-gefilterte Offset (IFO) ist, wird dann
mit einem Verzögerungsfilter
erster Ordnung gefiltert, um das geglättete Offset wie folgt zu erhalten.
-
Wie
weiterhin 5 zeigt, ist, wenn der impuls-gefilterte
Versatz größer als
der zuvor bestimmte, geglättete
Versatz ist (Schritt 90), die Gleichung (Schritt 92) SOT = SOT-1 +
TPINFC(IFO – SOT-1)wobei SOT den
neuen, geglätteten
Versatz darstellt, SOT-1 den alten, geglätteten Versatz
darstellt, TPINFC den Drosselposition-Sensor-Versatz, der die Filterkonstante
erhöht,
die einen Bereich von 0-1 und einen Vorgabewert von 0,01 besitzt,
darstellt.
-
Ansonsten
wird, am Schritt 94, der geglättete Versatz wie folgt bestimmt SOT = SOT-1 +
TPDEFC(IFO – SOT-1)wobei TDPEFC den Drosselposition-Sensor-Versatz,
der die Filterkonstante verringert, darstellt, die einen Bereich
von 0-1 und einen Vorgabewert von 0,2 besitzt.
-
Wenn
das ECM 20 als eine digitale Eingabe eine Drossel-Leerlaufschalter-Ausgabe
empfängt
und der entzerrte Zustand dieser Eingabe eine niedrige, externe
Eingabe zu dem ECM darstellt, was einen geschlossenen Drossel-Leerlauf-Validierungsschalter
anzeigt (Schritt 96), dann wird der berechnete Versatz
am Schritt 98 wie folgt erhalten COT = max (COT-1, max(SOT + TPOHIS, TPOMIN)wobei COT den
neuen, berechneten Versatz darstellt, COT-1 den
alten, berechneten Versatz darstellt, SOT den geglätteten Versatz
darstellt, TPOHIS die Hysterese des Drosselposition-Sensor-Versatzes
darstellt, die einen Bereich von 0-250 besitzt, und TPOMIN den minimalen
Versatz des Drosselpositions-Sensors darstellt, der einen Bereich
von 0-250 besitzt.
Demzufolge vergleicht das ECM 20 zuerst die Summe des momentan
geglätteten
Versatzes und der Hysterese des minimalen TPS-Versatzes und nimmt
das Maximum der zwei. Das ECM vergleicht dann die Größe des zuvor
berechneten Drossel-Versatzes
und nimmt das Maximum dieser zwei als den neuen Drossel-Versatz.
-
Ansonsten
wird der berechnete Versatz am Schritt 100 entsprechend
zu COT = max (min (COT-1, SOT + TPOHIS,
TPOMIN)berechnet.
-
Demzufolge
vergleicht das ECM zuerst den zuvor berechneten Versatz mit der
Summe des momentanen, geglätteten
Versatzes und der Hysterese des TPS-Versatzes und nimmt das Minimum.
Als nächstes vergleicht
das ECM 20 die Größe des minimalen
TPS-Versatzes und nimmt das Maximum dieses Vergleichs.
-
Zusätzlich zu
den Merkmalen, die vorstehend beschrieben sind, umfasst die vorliegende
Erfindung eine Gang-Verhältnis-Drehmoment-Begrenzung,
die in einer abschließenden
Drehmoment-Bestimmung durch das elektronische Steuermodul 20 ausgeführt ist.
Die Strategie für
eine Gang-Verhältnis-Drehmoment-Begrenzung
wird zuerst angegeben, gefolgt durch eine Erläuterung der Variablen, der
Terme, und dergleichen, die hier verwendet sind. Es sollte ersichtlich
werden, dass, obwohl sich die vorliegende Diskussion auf eine Drehmoment-Begrenzung
eines niedrigen Gangs konzentriert, die Strategie ebenso bei anderen
Gang- bzw. Übersetzungs-Verhältnissen
mit geeigneten Modifikationen anwendbar ist.
-
Wie
nun 6 zeigt, begrenzt allgemein die Drehmoment-Begrenzungs-Strategie
in niedrigen Gängen
ein Motor-Drehmoment basierend auf einer Motor-Geschwindigkeit (ES)
und auf einer Fahrzeug-Geschwindigkeit (VS) bei der Bemühung, das
Getriebe ge gen eine Beschädigung
zu schützen.
Die Motor- und Fahrzeug-Geschwindigkeiten werden, wie dargestellt
ist, am Schritt 110 gemessen. Genauer gesagt wird, am Schritt 112,
ein virtuelles Gang- bzw. Übersetzungs-Verhältnis (virtual
gear ratio – VGR)
bestimmt. VGR ist als das Verhältnis
der Motor-Geschwindigkeit und der Fahrzeug-Geschwindigkeit (VGR
= ES/VS) definiert. Am Schritt 114 wird VGR mit einem vorgegebenen
Wert verglichen, wie beispielsweise einem niedrigen Drehmoment-Begrenzungs-Schwellwert
eines niedrigen Gangs (trlrat). Basierend auf diesem Vergleich kann
das Motor-Drehmoment begrenzt werden. Es sollte ersichtlich werden,
dass dabei vorgegebene Werte vorhanden sein könnten, die einer Vielzahl von Übersetzungs-
bzw. Gang-Verhältnissen
zugeordnet sind -- im Gegensatz zu einem einzelnen Schwellwert.
-
Wie
weiterhin 6 zeigt, bestimmt, in der bevorzugten
Ausführungsform,
am Schritt 116, das ECM 20, ob das VGR nicht unterhalb
des Schwellwerts plus/minus einer gewissen Hysterese (trlhys) liegt,
seitdem es das letzte Mal oberhalb von trlrat war. Allgemein wird,
wenn sich VGR verringert, VGR mit der Größe (trlrat – trlhys) verglichen, wogegen
VGR mit der Größe (trlat
+ trlhys) verglichen wird, falls sich VGR erhöht. Die Verwendung einer Hysterese
besitzt die bekannten Vorteile. Basierend auf dem Vergleich am Schritt 116 wird
das Motor-Drehmoment auf den Wert der unteren Drehmoment-Begrenzung des niedrigen
Gangs (trllim) am Schritt 118, die kalibrierbar ist, begrenzt.
Das Ergebnis ist dasjenige, dass dann, wenn sich das Getriebe in einem
niedrigen Gang befindet (d.h. hohe Motor-Geschwindigkeit relativ
zu einer Fahrzeug-Geschwindigkeit), das Motor-Drehmoment begrenzt
wird. Auf diese Art und Weise kann eine leichtere Übersetzungs-Übertragung,
mit den damit verbundenen Kosteneinsparungen, verwendet werden.
-
In
der bevorzugten Ausführungsform
wird, wenn der Motor abgeschaltet wird, aufgrund zum Beispiel des
Vorhandenseins eines Anhaltens des Motorbetriebs, das End-Drehmoment auf Null
gesetzt. Die Bestimmung des End-Drehmoments (final torque – FTQ) variiert
basierend auf zahlreichen Betrachtungen, die nachfolgend beschrieben
sind. Wenn das elektronische Steuermodul eine Master-Steuereinheit
ist (im Gegensatz zu einer Slave-Steuereinheit) und eine Slave-zu-Master-Nachricht
von einer Kommunikations-Verbindung
(wie beispielsweise eine SAE J1939 Verbindung) während des momentanen Zündzyklus
gelesen worden ist, dann wird das End-Drehmoment (FTQ) entsprechend
zu FTQ = min (RDTQCTL,
RDTQMSS, SCTQ) bestimmt, wobei RDTQCTL das herunter fahrende (rampdown) Drehmoment,
bestimmt durch das ECM, ist, RDTQMSS das
herunter fahrende Drehmoment von der am kürzesten vorliegende Nachricht,
die über
die Verbindung empfangen ist, ist und SCTQ das Abgas-Steuerdrehmoment
ist.
-
Ansonsten
ist, wenn der Fahrzeug-Geschwindigkeitssensor freigegeben ist, die
niedrige Gang-Drehmoment-Grenze freigegeben ist, die externe Motor-Synchronisation
nicht eingestellt, und ein Fahrzeug-Geschwindigkeits-Ausfallfehler
erfasst, FTQ FTQ = min (RDTQ, trllim, SCTQ)wobei
RDTQ ein herunter fahrendes Drehmoment ist, trllim der Drehmoment-Begrenzungswert für einen
niedrigen Gang ist, der einen Bereich von 0-100% und eine grobe
Auflösung
von 0,5% besitzt, und SCTQ das Abgassteuer-Drehmoment ist. Demzufolge
wird das Minimum der drei Größen als
End-Drehmoment verwendet.
-
Ansonsten
wird, wenn der Fahrzeug-Geschwindigkeitssensor freigegeben ist,
die niedrige Gang-Drehmoment-Grenze freigegeben ist, die externe
Motor-Synchronisation nicht eingestellt ist und die Fahrzeug-Geschwindigkeit
geringer als die minimale Tempomat-Geschwindigkeit ist, um sie auf
die Fahr-Geschwindigkeit (Cruise) einzustellen, FTQ entsprechend
zu FTQ = min (RDTQ, trllim SCTQ)bestimmt.
-
Ansonsten
wird, wenn der Fahrzeug-Geschwindigkeitssensor freigegeben ist,
die Drehmoment-Grenze für
einen niedrigen Gang freigegeben ist, die externe Motor-Synchronisation nicht
eingestellt ist und VGR nicht unterhalb von trlrat- trlhys gewesen
ist, seitdem er das letzte Mal oberhalb von trlrat war, dann FTQ
entsprechend zu FTQ = min (RDTQ, trllim SCTQ)bestimmt,
wobei trlrat der Schwellwert einer Drehmoment-Grenze VGR eines niedrigen
Gangs ist, der einen Bereich von 0-300 und eine Vorgabe von 0,01
RPM/MPH besitzt, und trlhys die Hysterese der Drehmoment-Grenze
VGR eines niedrigen Gangs ist, die einen Bereich von 0-300 und eine
Vorgabe von 0,01 RPM/MPH besitzt. Ansonsten wird FTQ entsprechend
zu FTQ = min (RDTQ, trllim SCTQ)bestimmt.
-
Ein
Herunterfahr-Drehmoment (rampdown torque – RDTQ) wird basierend auf
einem Anhalte-Motor-Begrenzungs-Drehmoment, einem Übertemperatur-Begrenzungs-Drehmoment und einem
Marine-Begrenzungs-Drehmoment, entsprechend zu RDTQ
= (min SETQ, OTTQ, MLTQ)bestimmt, wobei SETQ das Anhalte-Motor-Begrenzungs-Drehmoment
ist, OTTQ das Übertemperatur-Begrenzungs-Drehmoment
ist und MLTQ das Marine-Begrenzungs-Drehmoment ist.
-
Allgemein
tritt ein Anhalt-Motor-Begrenzungs-Drehmoment dann auf, wenn ein
Zustand eines Anhaltens des Motors existiert, wie beispielsweise
niedriger Öldruck.
In der bevorzugten Ausführungsform
wird SETQ entsprechend zu SETQ = max (setmin,
ST·STPTS)bestimmt,
wobei setmin das minimale Anhalt-Motor-Begrenzungs-Drehmoment ist,
ST das gesicherte Drehmoment ist -- der Wert eines End-Drehmoments
FTQ zu dem Zeitpunkt, zu dem der erste Anhalt-Motor-Zustand auftrat,
und STPTST die Anhalt-Motor-Drossel-Skalierungszeit
ist, die einen Bereich von 0-100 und eine ungefähre Auflösung von 0,5% besitzt.
-
Demzufolge
vergleicht, um die Anhalt-Motor-Begrenzungs-Drehmomentgrenze zu
bestimmen, das ECM 20 die Werte des minimalen Anhalt-Motor-Drehmoments,
und die Größe des gesicherten
Drehmoments und der Anhalt-Motor-Skalierungszeit, und stellt SETQ
als das Maximum der verglichenen Werte ein. Falls kein Anhalt-Motor-Zustand
existiert, ist SETQ 100% des verfügbaren Motor-Drehmoments oder
des End-Drehmoments (FTQ).
-
Wie
vorstehend dargestellt ist, basiert das Herunterfahr-Drehmoment
auch auf einem Übertemperatur-Begrenzungs-Drehmoment.
Allgemein tritt ein Übertemperatur-Begrenzungs-Drehmoment
dann auf, wenn zumindest ein Übertemperatur-Zustand
existiert. Typische Übertemperatur-Zustände umfassen,
sind allerdings nicht notwendigerweise darauf beschränkt, überhöhte Zylinderkopf-Temperaturen,
Kühlmittel-Temperaturen, Öltemperaturen
und Getriebe-Temperaturen. Wenn ein Übertemperatur-Schutz freigegeben
ist, wird, in der bevorzugten Ausführungsform, OTTQ entsprechend
zu OTTQ = max (setmin, ST·DIWTST)bestimmt, wobei
ST ein gesichertes Drehmoment ist -- der Wert eines gefilterten
Drehmoments (STQ) zu der Zeit, zu der der Übertemperatur-Zustand begann,
und DIDWTST der warnende Drossel-Skalierungs-Tabellenwert ist, wobei
der Wert davon basierend auf der Größe der Übertemperatur variiert. In
einer Ausführungsform nimmt
DIWTST einen Wert zwischen 0 und 100 an.
-
Ein
Marine-Begrenzungs-Drehmoment wird auch beim Bestimmen des Herunterfahr-Drehmoments verwendet.
Vorzugsweise wird das Marine-Begrenzungs-Drehmoment entsprechend
zu
bestimmt,
wobei tqtret die Endzeit einer maximalen Drehmoment-Verringerung
ist, TMR
TL der Drehmoment-Begrenzungs-Zeitgeber
ist, wobei der Wert davon die Zeit darstellt, seit der die Drehmoment-Grenze überschritten
wurde, tqtret die Maximum-Drehmoment-Reduktions-Startzeit-Variable
ist, MAXTQ das maximale Drehmoment des Motors ist, DTQLMT der digitale
Drehmoment-Begrenzungs-Tabellenwert ist, der auf der Motor-Geschwindigkeit
(ENGRPM) basiert, TQADV der Drehmoment-Einstellungs-Tabellenwert ist,
der auf der Motor-Bemessung und der Motor-Geschwindigkeit basiert,
und ARN die aktive Bewertungszahl ist. Falls das TMR
TL geringer
als der Wert der Maximum-Drehmoment-Reduktions-Startzeit-Variablen
(tqtrst) ist, dann beträgt
das Marine-Begrenzungs-Drehmoment
100% des End-Drehmoments.
-
Wie
vorstehend dargestellt ist, wird das End-Drehmoment FTQ über einen
Vergleich mit SCTQ, dem Start- und dem Abgas-Kontroll-Drehmoment
bestimmt. Wenn sich der Motor in dem Start-Betriebsmodus befindet,
wird STCQ entsprechend zu STCQ = RTQI + SMDTQbestimmt,
wobei RTQI das vom Fahrer geforderte Drehmoment darstellt und SMDTQ
das Start-Drehmoment darstellt, wobei der Wert davon basierend auf
der Öltemperatur
und der Motor-Geschwindigkeit variiert. In der bevorzugten Ausführungsform
befindet sich der Motor in dem Start-Betriebsmodus, wenn die Motor-Geschwindigkeit
innerhalb eines vorgegebenen Geschwindigkeits-Fensters liegt. Genauer
gesagt befindet sich der Motor in einem Start-Modus, wenn die Motor-Geschwindigkeit
nicht oberhalb der Größe smiddl
+ ISPD (wobei smiddl eine vorbestimmte Delta-Geschwindigkeit oberhalb
der Motor-Leerlauf-Geschwindigkeit darstellt, die überschritten
werden muss, um den Start- Modus
des Motorbetriebs zu verlassen, und ISPD die Leerlauf-Geschwindigkeit
darstellt) gewesen ist, seitdem die Motor-Geschwindigkeit zuletzt
unterhalb von smback war (was die Motor-Geschwindigkeit darstellt,
um wieder in den Start-Modus einzutreten).
-
Ansonsten
befindet sich, wenn das Drehzahlregler-Drehmoment (governor torque – GOTQ)
das Abgas-Grenz-Drehmoment (SLTQ) übersteigt, der Motor in einem
Abgas-Kontroll-Betriebsmodus,
und SCTQ = SLTQ, was unter Verwendung der Abgas-Grenz-Drehmoment-(SCTORQ)-Funktion
bestimmt wird, wobei der Wert davon basierend auf der Motor-Bemessung
(ARN), SCBST (Abgas-Kontroll-Boost-Druck) und Motor-Geschwindigkeit (ENGRPM)
variiert: SLTQ = SCTORQ (ARN, SCBST, ENGRPM)Ansonsten,
SCTQ = gefordertes Drehmoment.
-
In
einer bevorzugten Ausführungsform
führt das
ECM 20 auch eine verbesserte Gebläse-Steuerlogik aus. Eine detaillierte
Diskussion der Gebläse-Steuerung
ist in der United States Patentanmeldung Serial Number 08/113,424,
angemeldet am 27. August 1993, mit dem Titel „Method for Engine Control", und übertragen auf
den Inhaber der vorliegenden Erfindung, angegeben, wobei die Beschreibung
davon hier ausdrücklich
unter Bezugnahme auf deren Gesamtheit eingeschlossen wird. Genauer
gesagt fügt
dieses Merkmal die Fähigkeit
hinzu, einen Betrieb des Gebläses
basierend auf dem Betriebszustand des Getriebe-Retarders bzw. -Gleitgrenze,
der Kühlmittel-Temperatur,
der Verteiler-Lufttemperatur
oder der Lufteinlass-Temperatur zu erzielen. In einer bevorzugten
Ausführungsform
legen das System und das Verfahren der vorliegenden Erfindung ein minimales
Motor-Abtriebs-Drehmoment-Erfordernis vor einer Betätigung des
Kühllüfters aufgrund
einer Anzeige einer hohen Lufttemperatur auf.
-
Gemäß der vorliegenden
Erfindung umfasst das ECM 20 eine digitale Eingabefunktion,
die für
einen Betrieb des Lüfters
vorgesehen ist, wenn der Getriebe-Retarder für eine Zeitdauer aktiviert
worden ist und die Kühlmittel-Temperatur
eine bestimmte Temperatur überschritten
hat. Auf diese Art und Weise versorgt das ECM 20 automatisch
den Lüfter
so mit Strom, um bei dem Kühlen
des Motors zu unterstützen,
um Wärme
vorzugreifen, die durch das Kühlmittel
aufgrund des Betriebs des Getriebe-Retarders absorbiert werden wird.
Systeme nach dem Stand der Technik beruhen oftmals primär auf der
Kühlmittel-Temperatur, um das
Kühl-Gebläse zu aktivieren.
Unter Vorausahnen des Anstiegs in der Kühlmittel-Temperatur schafft
die vorliegende Erfindung eine verbesserte Kontrolle der Motor-Betriebstemperatur,
was eine Anzahl von damit verbundenen Vorteilen hat, wie dies nachfolgend
diskutiert ist.
-
Darüber hinaus
umfasst, in einer bevorzugten Ausführungsform, das ECM 20 eine
Lufttemperatur-Drehmoment-Begrenzung. Wenn irgendein Teil des Lüftersystems
ausgefallen ist oder wenn ein Fahrer des Fahrzeugs vergisst, die
Winterabdeckung des Kühlers
vor einem Fahren in warmen Umgebungs-Temperaturen zu entfernen,
wird die komprimierte Luft für
den Turbolader nicht ausreichend vor einer Zuführung zu den Zylindern gekühlt werden.
Als eine Folge steigen die Verbrennungs-Temperaturen an, was zu
einer frühzeitigen
Abnutzung der Zylinderwände
und des Kolbens führt.
Obwohl andere Anordnungen möglich
sind, ist dieses Merkmal vorzugsweise so ausgelegt, dass ein Drehmoment
verringert wird, wenn die Lufteinlass-Temperatur größer als
ATNTMP ist und die Motor-Geschwindigkeit größer als ATNRPM für eine maximale
Verringerung von ATQMIN bei ATXRPM ist. Ein Einstellen von ATMRPM
auf ein RPM größer als
die maximale Getriebe-Überlastungsdrehzahl
(RPM) wird dieses Merkmal freigeben.
-
Genauer
gesagt wird, immer wenn die Einlass-Temperatur der Luft (komprimiert
oder nicht komprimiert) oberhalb von ATNTMP ansteigt und die Motor-Geschwindigkeit
ATNRPM übersteigt,
eine absolute Drehmoment-Grenze berechnet. Das Drehmoment des Motors
wird diese Grenze nicht überschreiten.
Die Lufttemperatur-Drehmoment-Grenze ist vorzugsweise so ausgelegt,
um eine konstante Leistung für
eine gegebene Temperatur anzunähern,
die ein vorhersagbares Motor-Verhalten und einen geeigneten Motorschutz liefert.
Wenn der Lufttemperatur-Sensor auf der hohen Seite ausfällt, wird
die Lufttemperatur bis zu der vorgegebenen Lufttemperatur heruntergehen
oder heraufgehen. Die Eingangsfilter-Konstante AIFFC bestimmt die Rampen-Rate,
die vorzugsweise mehrere Sekunden überspannt, so dass plötzliche
Drehmoment-Begrenzungssprünge
nicht auftreten.
-
Die
Lufttemperatur-Drehmoment-Begrenzung wird entsprechend zu

bestimmt,
wobei AIT die Lufttemperatur ist (Lufteinlass- oder Verteiler-Lufttemperatur),
ATNRPM die Motor-Geschwindigkeit ist, bei der oder unterhalb der
ATTQ 100% für
irgendeine Lufttemperatur ist, ATQMAX die absolute Drehmoment-Grenze
ist, wenn die Motor-Drehzahl größer als
oder gleich zu ATXRPM ist und die Lufttemperatur geringer als oder
gleich zu ATNRMP ist, ATQMIN die minimale, absolute Drehmoment-Grenze ist (ATTQ
entspricht diesem Wert, wenn die Geschwindigkeit größer als
oder gleich zu ATXRPM ist und die Lufteinlass-Temperatur größer als
oder gleich zu ATXTMP ist), ATTQ eine absolute Drehmoment-Grenze
ist und ein Faktor beim Bestimmen des Rampdown-Drehmoments ist (das
End-Drehmoment (FTQ) kann diese Grenze nicht übersteigen), ATXRPM die Motor-Geschwindigkeit
ist, bei der ATTQ = ATQMAX ist, wenn die Lufttemperatur ≤ ATXTMP ist
und die Motor-Geschwindigkeit bei oder oberhalb dem Wert liegt,
bei dem die maximale Drehmoment-Reduktion auftritt, spezifisch ATTQ
= ATQMIN, wenn die Lufttemperatur ≥ ATXTMP
gilt, und ENGRPM das Motor-RPM, gemittelt über 90° für 8- und 16, Zylindermotoren,
180° für 4-Zylindermotoren
und 120° für andere,
ist.
-
In 7 nun
ist ein Flussdiagramm, das ein Leerlauf-Abschalt-Merkmal zwischen
Umgebungs-Temperatur-Grenzen entsprechend der vorliegenden Erfindung
darstellt, gezeigt. Ähnlich
zu den zuvor beschriebenen Merkmalen wird dieses Merkmal durch das
ECM 20 ausgeführt.
Dieses Merkmal dient für
ein wahlweises Motor-Abschalten nach einer vorgegebenen (oder möglicherweise
anpassbaren) Zeitperiode, während
der vorgegebene Bedingungen erfüllt
werden. Da ein Leerlauf bei niedrigen Leerlauf-Geschwindigkeiten Schwefelsäure erzeugt,
die die Ölqualität verschlechtert,
und Lager, Ringe, Ventilschäfte,
und andere Motorflächen, angreifen
kann, begrenzt dieses Merkmal die Zeitperiode, für die ein Bediener den Motor
im Leerlauf belassen kann. Weiterhin hilft dieses Merkmal dabei,
die gesamte Kraftstoff-Ökonomie
des Fahrzeugs zu verbessern, während
Geräusche
und Emissionen verringert werden.
-
Block 130 der 7 führt verschiedene
Initialisierungs-Funktionen durch, wie beispielsweise Bestimmen,
ob ein Umgebungslufttemperatur-Sensor installiert worden ist und
geeignet arbeitet, ob die Handbremse angezogen ist und der Motor
im Leerlauf läuft,
d.h. das Gaspedal nicht niedergedrückt ist, und die Funktion eines
hohen Leerlaufs nicht aktiv ist. Die Funktion eines hohen Leerlaufs
wird vorgesehen, um einen Fahrzeug-Aufwärmzyklus
zu erleichtern, während
die Nachteile vermieden werden, die einem niedrigen Leerlauf zugeordnet
sind, wie dies vorstehend beschrieben ist. Wenn ein Umge bungslufttemperatur-Sensor
nicht installiert ist, oder installiert ist, allerdings nicht konfiguriert
ist, wird das System die Umgebungslufttemperatur abschätzen, wie
dies im Detail unter Bezugnahme auf 8 dargestellt
und beschrieben ist. Ähnlich
wird, wenn ein Umgebungslufttemperatur-Sensor installiert ist und
eine Kurzschluss-Schaltung zu Masse hin erfasst ist, die Umgebungslufttemperatur
so abgeschätzt
werden, wie dies nachfolgend beschrieben ist. Wenn ein Umgebungslufttemperatur-Sensor
installiert ist, und ein Kurzschlusskreis zu der Fahrzeug-Batterie
erfasst ist, wird die Umgebungslufttemperatur auf einen Wert von
70°F eingestellt,
ein Fehler wird erfasst und das Prüfmotorlicht wird beleuchtet.
Dies verhindert, dass ein Leerlauf-Abschalten übergangen wird, solange wie
70°F innerhalb
des Bereichs fällt,
der durch die untere Kalibrierungsgrenze (LL) und die obere Kalibrierungsgrenze
(OL) eingerichtet ist, wie dies nachfolgend erläutert ist. Das Leerlauf-Abschalt-Merkmal
kann durch Einstellung der oberen Kalibrierungsgrenze (OL) auf einen
Wert geringer als die untere Kalibrierungsgrenze (LL) gesperrt werden.
-
Block 132 der 7 bestimmt
die Umgebungslufttemperatur. Dies kann direkt durch Überwachen
des geeigneten Sensors durchgeführt
werden oder kann eine Abschätzung
sein, wie dies im Detail nachfolgend beschrieben ist. Der Block 134 überwacht
den Leerlauf-Zeitgeber, um einen Leerlauf für eine vorgegebene Zeitperiode,
vorzugsweise fünf
(5) Minuten, zuzulassen, bevor der Bediener gewarnt wird, dass ein
Abschalten des Motors verhindert wird, und zwar am Block 136.
Diese Warnung kann irgendein geeignetes Signal sein, wie beispielsweise
ein Summer, ein Licht, oder dergleichen. In einer bevorzugten Ausführungsform
blinkt das Prüfmotorlicht
für ungefähr neunzig
(90) Sekunden, bevor der Motor ausgeschaltet wird.
-
Während der
Warnperiode kann der Bediener das Abschalten außer Kraft setzen, wie dies
durch Block 138 angezeigt ist, vorausgesetzt, dass ein
solches Außerkraftsetzen
durch den Bediener freigegeben ist, wie dies durch eine Kalibrierungs-Variable
bestimmt ist, die über
eine Benutzer-Schnittstelle 34 eingestellt werden kann.
Vorzugsweise wird eine Anforderung für ein Außerkraftsetzen durch ein augenblickliches
Niederdrücken des
Gaspedals angezeigt. Falls ein Außerkraftsetzen durch den Fahrer
nicht zugelassen wird, wie dies durch die Kalibrierungs-Variable
bestimmt ist, oder das Außerkraftsetzen
nicht durch Niederdrücken
des Gaspedals (oder einer ähnlichen
Anzeige) gefordert wird, wird der Motor abgeschaltet werden, wie
dies durch Block 150 angezeigt ist. Wenn ein Außer kraftsetzen
durch einen Bediener bzw. Fahrer freigegeben ist und durch Block 138 erfasst
ist, dann geht die Steuerung weiter zu Block 140.
-
Da
es erwünscht
ist, verlängerte
Leerlauf-Perioden unter bestimmten Umgebungslufttemperatur-Bedingungen
zuzulassen, wie beispielsweise solche, die einen Betrieb des Fahrzeug-Heiz-
oder Kühlsystems rechtfertigen,
bestimmt Block 140, ob die momentane Umgebungslufttemperatur
(AATMP) innerhalb des Bereichs liegt, der durch die Werte von LL
und UL bestimmt ist. In einer bevorzugten Ausführungsform besitzt LL einen
Wert entsprechend zu ungefähr
40°F und
UL besitzt einen Wert entsprechend zu ungefähr 80°F. Wenn der Wert von AATMP innerhalb
der Grenzen liegt, die durch die Werte von LL und UL bestimmt sind,
oder der Wert von AATMP einen hohen Grenzwert (HL) übersteigt,
wie dies durch Block 140 bestimmt ist, geht die Steuerung
weiter zu Block 144. Ansonsten setzt der Block 142 einen
Verzögerungs-Zeitgeber
zurück,
was zu einer unbegrenzten Leerlaufzeit führt, während die geeigneten Betriebsbedingungen
erfüllt
werden. Der Wert von HL, der vorzugsweise ungefähr 176°F beträgt, wird dazu verwendet, einen
Versuch zu erfassen, den Sensor durch Anordnen des Sensors auf einer
relativ heißen
Fläche
zu umgehen. Demzufolge wird, wenn die Umgebungslufttemperatur, bestimmt
durch einen Temperatursensor, diesen Wert übersteigt, dann das Außerkraftsetzen
durch den Bediener gesperrt, was zu einem Abschalten des Motors
führt,
wie dies durch Block 150 angezeigt ist.
-
Wenn
die Umgebungslufttemperatur so abgeschätzt wird, wie dies vorstehend
beschrieben und durch Block 144 dargestellt ist, wird der
Verzögerungs-Zeitgeber
(falls er nicht bereits läuft)
am Block 146 eingestellt. Vorzugsweise wird der Verzögerungs-Zeitgeber auf ungefähr zwanzig
(20) Minuten eingestellt. Block 148 bestimmt dann, ob der
Verzögerungs-Zeitgeber
abgelaufen ist. Der Verzögerungs-Zeitgeber
schafft eine ausreichende Einschwingzeit für verschiedene Parameter, die
für die
Umgebungsluft-Abschätzungs-Funktion
verwendet sind, wie dies nachfolgend beschrieben ist. Wenn der Zeitgeber,
initiiert am Block 142 oder 146, abläuft, wird
der Motor abgeschaltet werden, wie dies am Block 150 angezeigt
ist, d.h. nur ein Außerkraftsetzen wird
pro Zündzyklus
zugelassen. Ähnlich
ist, wenn ein Umgebungslufttemperatur-Sensor installiert ist, und
geeignet arbeitet, eine Einschwingzeit nicht erforderlich und der
Motor wird abgeschaltet, nachdem die vorgegebene Leerlauf-Periode
abgelaufen ist.
-
In
8 nun
ist eine grafische Darstellung einer Umgebungslufttemperatur-Abschätzung dargestellt. In
einer bevorzugten Ausführungsform
wird die Umgebungslufttemperatur unter Verwendung von Informationen
abgeschätzt,
die üblicherweise
von den Standard-Motorsensoren verfügbar sind, entsprechend zu
wobei
T
air die Lufttemperatur
166 darstellt,
die der Wert der Verteiler-Lufttemperatur ist, wenn ein Verteiler-Lufttemperatursensor
konfiguriert worden ist, wie dies durch Block
160 dargestellt
ist. Ansonsten ist die Lufttemperatur
166 gleich zu der
Lufteinlass-Temperatur
(AIT)
162, wie dies vorstehend beschrieben ist, wie dies durch
Element
164 dargestellt ist. Block
170 stellt
die Motor-Öltemperatur
(T
oil) dar, wie sie durch einen entsprechenden
Sensor bestimmt ist. Block
172 stellt die Motor-Drehzahl
dar, die durch den Wert von K
E (6 in einer
bevorzugten Ausführungsform)
skaliert ist, wie dies durch Block
174 dargestellt ist.
Block
180 stellt den Umgebungsluft-Offset-Faktor (T
aoff) dar und Block
188 stellt ein
Kühllüfter-Offset
(Fan
off) dar. Die „max" Funktion, dargestellt durch Block
182,
wählt den
größeren der
Werte innerhalb von Klammern, und abgegrenzt durch ein Komma, aus,
d.h. die „max" Funktion führt einen
Wert von Null für
ansonsten negative Werte zurück.
Die Umgebungslufttemperatur (T
AATP), dargestellt
durch Block
196, ist gleich zu seinem vorherigen Wert,
addiert zu einem skalierten Differenzwert, wie dies durch einen
Skalierungs-Faktor K
F bestimmt ist, dargestellt
durch Block
194. Die Motor-Geschwindigkeit wird in die Abschätzung eingeschlossen,
da, wenn sich die Motor-Geschwindigkeit
erhöht,
die Lufttemperatur weniger Zeit hat, um durch den Motor erwärmt zu werden. Ähnlich wird
das Kühllüfter-Offset
eingeschlossen, wenn das Kühlgebläse eingeschaltet
ist, da dies auch die Lufttemperatur verringert.
-
9 gibt
eine grafische Darstellung eines absoluten Drehmoments gegenüber einer
Motor-Geschwindigkeit an, was die Beziehung zwischen einer Motor-Geschwindigkeit,
einer Lufttemperatur und einer Drehmoment-Grenze in einem Fahrzeug system,
wie beispielsweise in einer bevorzugten Ausführungsform der vorliegenden
Erfindung, darstellt.
-
Es
ist natürlich
verständlich,
dass, während
die Formen der Erfindung hier dargestellt und beschrieben sind,
die die bevorzugten Ausführungsformen
der Erfindung bilden, diese allerdings nicht dazu vorgesehen sind,
alle möglichen
Formen davon darzustellen. Es wird auch verständlich werden, dass die Worte,
die verwendet sind, beschreibend, im Gegensatz zu einschränkend, sind
und dass verschiedene Änderung
vorgenommen werden können.